目錄
- 1.摘要
- 2.算法原理
- 3.結果展示
- 4.參考文獻
- 5.文章&代碼獲取
1.摘要
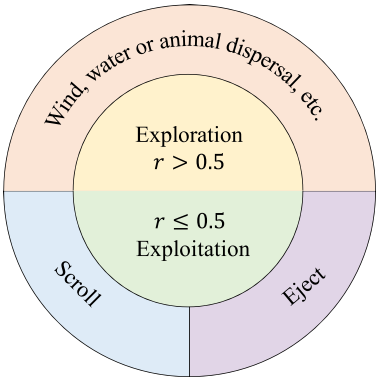
本文提出了一種新穎的元啟發式算法——長穎燕麥優化算法(AOO),該算法靈感來自動畫燕麥在環境中的自然行為。AOO模擬了長穎燕麥的三種獨特行為:(i) 通過自然元素如風、水和動物進行種子傳播;(ii) 在吸濕運動的影響下,長穎燕麥種子的主要芒刺發生變形和旋轉,使整個種子能夠滾動并傳播;(iii) 在滾動傳播過程中,當種子遇到障礙物時,會儲存能量,并在特定條件下觸發推進機制,進一步傳播種子。

2.算法原理
參數計算
長穎燕麥種子傳播過程的特征與種子主芒的長度、質量和滾動過程中的偏心系數有關。
{ m = 0.5 × r d i m L = N × r d i m e = 0.5 × r d i m c = 1 ? ( t T ) 3 \left\{ \begin{array}{l} m = 0.5 \times \frac{r}{dim} \\ L = N \times \frac{r}{dim} \\ e = 0.5 \times \frac{r}{dim} \\ c = 1 - \left(\frac{t}{T}\right)^3 \end{array} \right. ? ? ??m=0.5×dimr?L=N×dimr?e=0.5×dimr?c=1?(Tt?)3?
其中, m m m表示長穎燕麥種子質量, L L L為長穎燕麥主芒長度, e e e為滾動種子時的偏心旋轉系數。
探索階段
在部分長穎燕麥從植物上脫落后,它們的傳播主要是通過風、水或動物的影響或作用來實現的。這種分散模式表現出顯著的隨機性,允許在廣泛的解空間中進行探索。
W = c π × ( 2 × r dim ? ? 1 ) ? U B W=\frac{c}{\pi}\times(2\times r_{\dim}-1)\otimes UB W=πc?×(2×rdim??1)?UB
{ X t + 1 ( i ) = 1 N × ∑ i = 1 N X t ( i ) + W , if? m o d ( i , N / 10 ) = 0 , X t + 1 ( i ) = X b e s t + W , if? m o d ( i , N / 10 ) = 1 , X t + 1 ( i ) = X t ( i ) + W , else . \left\{ \begin{array}{l} X_{t+1}(i) = \frac{1}{N} \times \sum_{i=1}^{N} X_t(i) + W, \text{ if } \mod(i, N/10) = 0, \\ X_{t+1}(i) = X_{best} + W, \text{ if } \mod(i, N/10) = 1, \\ X_{t+1}(i) = X_t(i) + W, \text{ else}. \end{array} \right. ? ? ??Xt+1?(i)=N1?×∑i=1N?Xt?(i)+W,?if?mod(i,N/10)=0,Xt+1?(i)=Xbest?+W,?if?mod(i,N/10)=1,Xt+1?(i)=Xt?(i)+W,?else.?
開發階段
在此階段,剩余的長穎燕麥種子根據是否遇到障礙物被分為兩種傳播方式,并假設這兩種情況的概率相等。在沒有障礙物的情況下,種子的位置變化通過濕度引起的應力梯度驅動吸濕滾動。受Lindtner等人研究的啟發,他們表明纖維素微纖絲的取向決定了各向異性的膨脹,論文通過臨界曲率模型來描述這種運動,采用了快折屈曲的方式。滾動機制通過偏心旋轉和扭矩公式:
A = U B ? ∣ U B × t × sin ? ( 2 × π × r ) T ∣ A=UB-\left|\frac{UB\times t\times\sin(2\times\pi\times r)}{T}\right| A=UB? ?TUB×t×sin(2×π×r)? ?
R = ( m × e + L 2 ) × r dim ? ( ? A , A ) dim ? R= \begin{pmatrix} m\times e+L^2 \end{pmatrix}\times\frac{r_{\dim}(-A,A)}{\dim} R=(m×e+L2?)×dimrdim?(?A,A)?
X t ( i ) = X b e s t + R + c × L e v y ( dim ? ) ? X b e s t X_t(i)=X_{best}+R+c\times Levy(\dim)\otimes X_{best} Xt?(i)=Xbest?+R+c×Levy(dim)?Xbest?
當種子在傳播過程中遇到障礙時,假設主芒在儲存能量的驅動下進行拋射。整個種子傳播過程以拋射運動為特征,AOO使用簡單彈丸運動模型進行位置更新:
B = U B ? ∣ U B × t × cos ? ( 2 × π × r ) T ∣ B=UB-\left|\frac{UB\times t\times\cos(2\times\pi\times r)}{T}\right| B=UB? ?TUB×t×cos(2×π×r)? ?
{ k = 0.5 + 0.5 × r x = 3 × r d i m θ = π × r α = 1 π × e r T \left\{ \begin{array}{l} k = 0.5 + 0.5 \times r \\ x = 3 \times \frac{r}{dim} \\ \theta = \pi \times r \\ \alpha = \frac{1}{\pi} \times e^{\frac{r}{T}} \end{array} \right. ? ? ??k=0.5+0.5×rx=3×dimr?θ=π×rα=π1?×eTr??
J = 2 × k × x 2 × sin ? ( 2 θ ) m g × r dim ? ( ? B , B ) dim ? × ( 1 ? α ) J=\frac{2\times k\times x^2\times\sin(2\theta)}{mg}\times\frac{r_{\dim}(-B,B)}{\dim}\times(1-\alpha) J=mg2×k×x2×sin(2θ)?×dimrdim?(?B,B)?×(1?α)
X t ( i ) = X b e s t + J + c × L e v y ( dim ? ) ? X b e s t X_t(i)=X_{best}+J+c\times Levy(\dim)\otimes X_{best} Xt?(i)=Xbest?+J+c×Levy(dim)?Xbest?
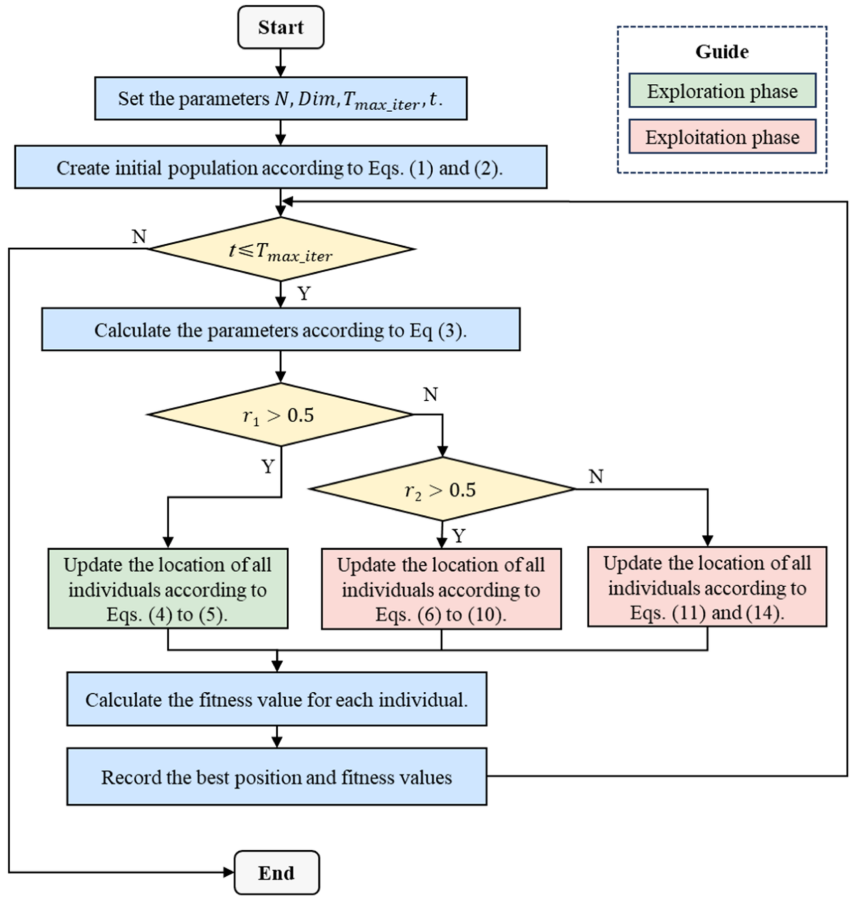
流程圖
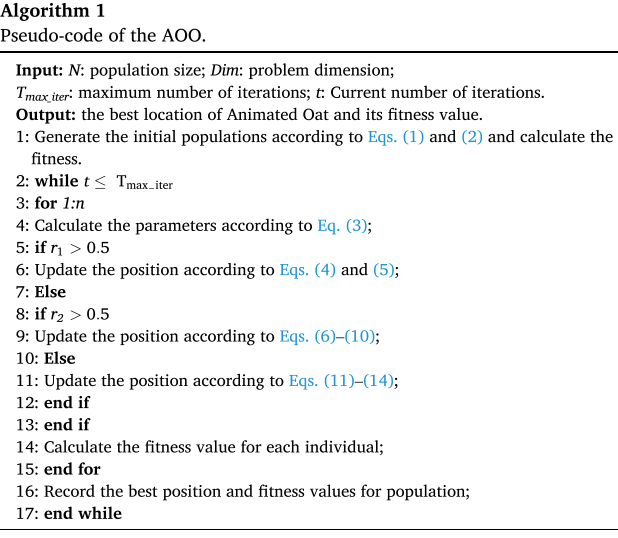
偽代碼
3.結果展示


4.參考文獻
[1] Wang R B, Hu R B, Geng F D, et al. The Animated Oat Optimization Algorithm: A Nature-Inspired Metaheuristic for Engineering Optimization and a Case Study on Wireless Sensor Networks[J]. Knowledge-Based Systems, 2025: 113589.

估計算法原理以及相具體的應用實例附C++代碼示例)





)

)







)

)