引言
2025 年 8 月 8 日,北京再一次成為全球矚目的科技焦點——世界機器人大會盛大開幕。來自全球的 200 余家頂尖企業齊聚一堂,帶來超過 1500 件展品,其中首發新品突破 100 款,涵蓋了從工業制造、醫療康復到服務陪伴、特種作業的方方面面。外骨骼機器人、人形機器人、家庭服務機器人、冰壺競技機器人等輪番亮相,不僅展示了令人驚嘆的技術突破,也勾勒出未來社會中“人機共生”的圖景。
然而,熱鬧的展覽背后,更值得行業深思的,是機器人真正走向產業落地的關鍵條件。**智能的未來并不僅僅依賴大模型與 AI 算法的能力迭代,更要扎根于機構學的突破與感知鏈路的工程化實現。**正如人體的運動離不開骨骼與神經系統的協同,機器人也需要精密的結構支撐、可靠的控制邏輯以及穩定低延遲的感知通道,才能完成復雜場景中的自主行為。這其中,大牛直播SDK所提供的跨平臺、低延遲視頻鏈路,正成為“機器人 × 視頻感知”閉環中不可或缺的基礎設施。
01 大會亮點企業產品聚焦
(一)傲鯊智能 —— 外骨骼機器人的剛柔并濟
Android平臺RTSP播放器時延測試
在展會現場,傲鯊智能帶來的 外骨骼機器人 VIATRIX 成為焦點。其 FLOAT 360 浮動式髖關節架構與高響應電機設計,使穿戴者在行走、奔跑、上臺階時動作自然流暢,仿佛將人體的力量進行了二次放大。
更值得關注的是,傲鯊并未僅依賴 AI 步態模型來優化動作,而是通過 精密機構學設計 + 實時力反饋感知,讓機器人能夠主動適應螺絲松緊、地面阻力等復雜條件。這種“能學會學習”的設計理念,讓外骨骼真正具備產業應用價值。
在此類場景中,視頻與力控的實時同步尤為關鍵。例如在工業搬運、康復訓練中,遠程醫生或工程師需要通過低延遲視頻實時觀察用戶動作,大牛直播SDK的 RTSP 低延遲鏈路(100–200ms)恰好為這類“人機協作”提供了堅實的視覺基礎,確保動作與反饋高度同步。
(二)星塵智能 —— 服務機器人的擬人化適應
星塵智能的 S1 服務機器人 以“design for AI”為核心亮相,創新的繩驅傳動讓其運動模式更接近人類肌肉收縮方式。通過自研控制算法,S1 能以 毫秒級延遲 復刻人類的細微動作,即便面對未知物體,也能快速調整策略完成任務。
這背后其實是 實時感知鏈路與 AI 決策的高效耦合。S1 需要隨時“看見”環境并傳遞到模型端,才能動態決策。如果視頻延遲過高,機器人會出現“指令滯后”或“錯誤執行”。在這一環節,大牛直播SDK的 跨平臺視頻采集與播放能力,為機器人提供了“眼到腦”的高速通道,讓 AI 模型真正能在實時環境下發揮作用。
(三)星海圖 —— 家庭機器人進入柔性任務時代
Android平臺Unity共享紋理模式RTMP播放延遲測試
星海圖展示的 R1 Lite 機器人,可以在嘈雜、隨機的臥室環境中完成鋪床任務。支撐這一演示的,是其即將推出的 VLA 基礎模型 G0,首次實現了端到端全身運動控制的柔性任務執行。
這類長程任務對視頻鏈路的要求更高:機器人需要持續捕捉環境信息,邊感知邊調整動作。如果視覺延遲過大,機器人會“鋪錯方向”甚至陷入停滯。此類場景正是大牛直播SDK Unity3D 跨平臺播放器的用武之地,它能保證在 Windows、Linux、Android、iOS 等終端統一實現低延遲渲染,使家庭機器人在動態環境中依然表現穩定。
(四)傅利葉 —— 打造有溫度的人形交互
Android平臺RTMP直播播放器延遲測試
傅利葉科技在大會上展示的 GR-3 人形機器人,以“溫暖科技”為核心理念,引起了大量觀眾互動。它采用柔膚軟包與莫蘭迪暖色系外觀設計,配合 55 個自由度,使其在動作和表情傳達上更接近人類。其自研的 全感交互系統 集成了聽覺、視覺和觸覺模塊,頭部麥克風陣列實現聲源定位,結構光 + RGB 攝像頭完成精準人臉識別,31 個觸覺傳感器實時感知外部環境。
這種多模態感知不僅僅是硬件堆疊,更要求感知信息在毫秒級內被同步處理。尤其在遠程教育、陪伴、康復訓練場景中,視頻通道的低延遲直接決定交互是否自然。大牛直播SDK的 RTSP/RTMP 播放與推流能力,為 GR-3 這類人形機器人提供了高實時性的視頻支撐,讓遠程端用戶可以即時看到機器人反饋,也讓機器人能通過低延遲視頻捕捉用戶微表情,實現更擬人化的情感交互。
(五)宇樹科技 —— 極限動作與動態平衡
安卓輕量級RTSP服務采集攝像頭,PC端到安卓拉取RTSP流
宇樹科技帶來的 G1 格斗款人形機器人 成為大會的焦點。其凌厲的出拳、高踢腿動作在現場贏得陣陣掌聲。更關鍵的是,當機器人因高速動作而意外摔倒時,它依然能通過 動態平衡算法 實現自主恢復,展現出接近人類的運動協調性。
此外,宇樹還發布了輕量化的人形機器人 R1,重量僅約 25kg,售價不足 4 萬元,并開放 EDU 開發者版本接口,吸引了科研機構和高校廣泛關注。
在這種高動態場景中,實時視頻鏈路的重要性被放大。格斗表演或科研試驗需要遠程操控和觀察,任何超過 500ms 的視頻延遲都會導致操控滯后,甚至引發安全問題。大牛直播SDK的 100–200ms 端到端延遲,在保證高清視頻質量的同時,使得遠程操控與機器人動作幾乎保持同步,為科研試驗和開發平臺提供了可靠的“視頻神經元”。
小結
從傲鯊的外骨骼,到星塵的服務機器人,再到星海圖的家庭機器人、傅利葉的情感交互,以及宇樹的人形格斗表演,本屆大會展示了機器人在 機構學突破、AI 算法進化與實時感知鏈路優化 三個維度的融合趨勢。
而在這其中,大牛直播SDK以跨平臺、低延遲、可擴展的視頻鏈路,為機器人產業的“感知與執行閉環”提供了堅實的底層支撐。
02 未來機器人板塊前景展望
(一)技術融合驅動性能飛躍
從本屆大會可以明顯看出,機器人正處在“多技術耦合”的加速階段:AI 大模型、具身智能、力控算法與新型傳感器、高能量密度電池、精密減速器等核心技術快速迭代,正在共同推動機器人性能實現質的飛躍。
例如,靈巧手的精細化操作、雙足機器人的動態平衡行走,都對感知和控制鏈路提出了更高要求。這里,低延遲視頻鏈路是不可或缺的一環:大牛直播SDK通過 跨平臺 RTSP/RTMP/GB28181 支撐,確保機器人在復雜場景中“所見即所感”,讓 AI 模型能夠實時響應環境變化,而非滯后數秒后才做出決策。
(二)政策支持注入發展動力
全球主要經濟體均將機器人產業列為戰略高地,我國的“制造強國戰略”更是明確提出重點支持 人形機器人創新與智能制造應用。在稅收優惠、研發補貼、首臺套保險等政策工具推動下,機器人企業的研發門檻正在不斷降低。
與此同時,政策也在推動 視頻鏈路與 AI 的標準化融合,例如智能制造示范工廠、智慧醫療試點,均要求具備跨平臺視頻互通能力。大牛直播SDK的模塊化能力(輕量級 RTSP 服務、RTSP 轉 RTMP 推送、多路轉發)能夠快速嵌入不同系統架構,幫助企業符合標準化要求,加速應用落地。
(三)成本下降促進市場滲透
隨著核心零部件(減速器、電機、傳感器)的國產化,機器人整機價格不斷下探。例如宇樹科技的 R1 人形機器人起售價僅 3.99 萬元,已接近“消費級電子產品”的水平。
但在“降本增效”的同時,機器人依然需要高可靠的視頻鏈路來保證任務執行。大牛直播SDK通過 輕量化部署(嵌入式 Linux/Android 模塊),讓機器人即便在低成本硬件條件下,也能維持 100–200ms 的低延遲傳輸,避免因為延遲過高而喪失應用價值。
(四)應用場景拓展創造無限可能
-
工業領域:新能源汽車、光伏、半導體等行業需要柔性生產,工業機器人和移動機器人(AMR)正在快速普及。大牛直播SDK可為 產線遠程監控與異常檢測 提供低延遲視頻支撐。
-
醫療康復:遠程康復訓練、手術輔助機器人需要實時可控的視頻鏈路。SDK 的 RTSP/RTMP 播放器保證畫面與動作高度同步。
-
服務與特種機器人:安防巡檢、清潔配送、農業生產機器人依賴跨平臺視頻傳輸。SDK 的 多協議兼容能力(RTSP、HTTP-FLV、GB28181)讓機器人可無縫對接不同系統。
-
極端環境:太空作業、深海探索、災難救援機器人更強調實時性和可靠性。SDK 的 自研內核 在弱網環境下保持穩定,滿足高危場景對通信鏈路的嚴苛要求。
(五)產業鏈價值重構與分化
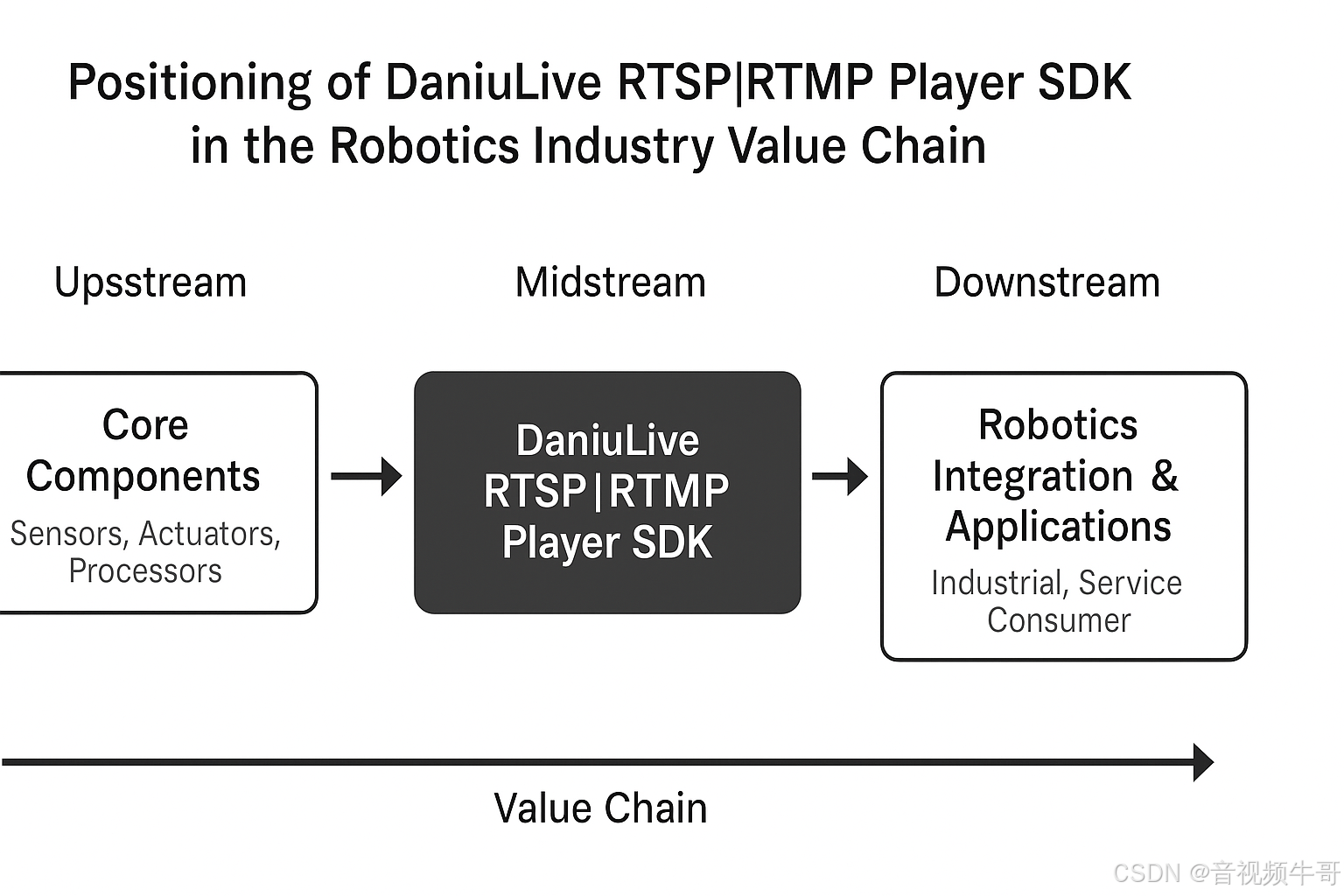
未來機器人產業鏈的價值將重構:
-
上游:掌握核心零部件的供應商(減速器、傳感器)。
-
中游:具備系統集成與量產能力的整機廠商。
-
下游:深耕垂直場景并提供整體解決方案的服務商。
在這一過程中,具備跨平臺、模塊化視頻內核的廠商將獲得額外溢價。因為機器人在各個場景中都需要“實時視頻輸入輸出”作為通用基礎,大牛直播SDK正是這種 橫跨上下游的通用基礎設施,既能賦能上游測試驗證,也能嵌入中游整機產品,還能成為下游應用解決方案的一部分。
結語
2025 世界機器人大會不僅展示了產業的熱鬧表象,更讓我們清晰地看到:機器人智能的未來在于三重驅動——機構學的突破、AI 算法的進化,以及低延遲視頻鏈路的工程化落地。
大牛直播SDK,作為跨平臺低延遲視頻內核,正在成為機器人“視覺神經元”的關鍵基座。從工業到醫療,從服務到特種場景,它讓機器人不僅能“動”,還能“看清、看準、快速決策”,真正完成感知 → 決策 → 執行的閉環。
未來,機器人板塊的繁榮,離不開這種 底層通信與感知的持續優化。而大牛直播SDK,正是在這場進化中,提供最具價值的底層支撐。
📎 CSDN官方博客:音視頻牛哥-CSDN博客


)







)



- DRM簡介)

C++入門(下))


