文章目錄
- 前言
- 一、低速容錯CAN-低速
- 二、低速容錯CAN-容錯
- 2.1 信號電平
- 2.2 終端電阻
- 2.3 容錯機制
前言
在ISO 11898-3 Low-speed, fault-tolerant, medium-dependent interface部分描述了低速CAN的容錯行為及其物理層內容。既然稱為低速容錯CAN,主要需要搞清楚的兩個核心概念:低速、容錯。
一、低速容錯CAN-低速
相較于高速CAN最大波特率1 Mbit / sec,低速容錯CAN的傳輸速度在40 Kbit / s至125 Kbits / sec,這是它低速的體現。
二、低速容錯CAN-容錯
ISO11898-3標準允許CAN總線在其連線失敗時通信得以繼續進行,即具備一定的通信容錯能力。這種容錯機制是怎么保證的呢?
2.1 信號電平
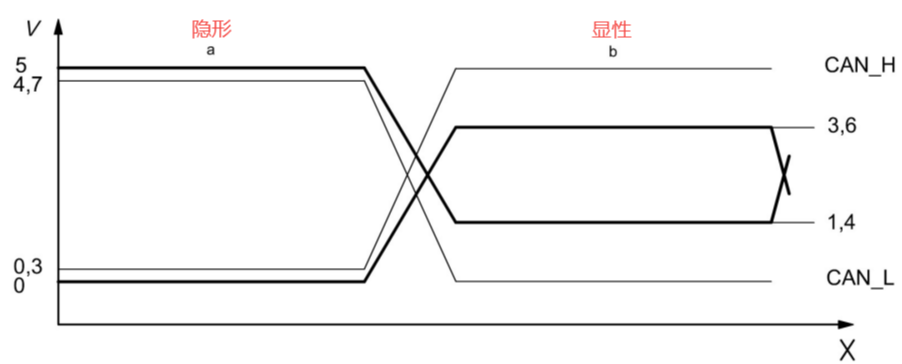
如下圖,在11898-3中給出了低速容錯CAN的顯隱性電平的定義:
- 顯性 (Dominant): CAN_H為3.6V, CAN_L為1.4V
- 隱性 (Recessive): CAN_H為0.3V, CAN_L為4.7V
不難看出,在顯隱性位跳變的過程中,單一線束上的壓差都在3V以上(CAN_H壓差:3.6-0.3=3.3V;CAN_L壓差:4.7-1.4=3.3V),相較于高速CAN的單一線束1V壓差,低速容錯CAN的抗干擾能力更強。
2.2 終端電阻
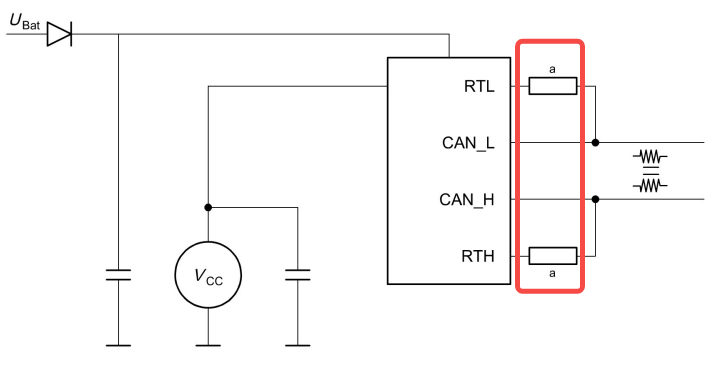
協議中指出,低速容錯CAN整個總線網絡的終端電阻應處于約100Ω的范圍內(但不得低于100Ω)。連接到單個收發器節點的單個電阻阻值不應低于500Ω,同時建議每個節點都配備自身的終端電阻(非絕對要求)。如下圖,在低速容錯CAN網段節點上的終端電阻不直接串聯在CAN線上,而是在旁路上。這種接入方式使得萬一出現CAN_H或CAN_L單線故障,節點仍然存在終端電阻去匹配阻抗進行單線通信。
2.3 容錯機制
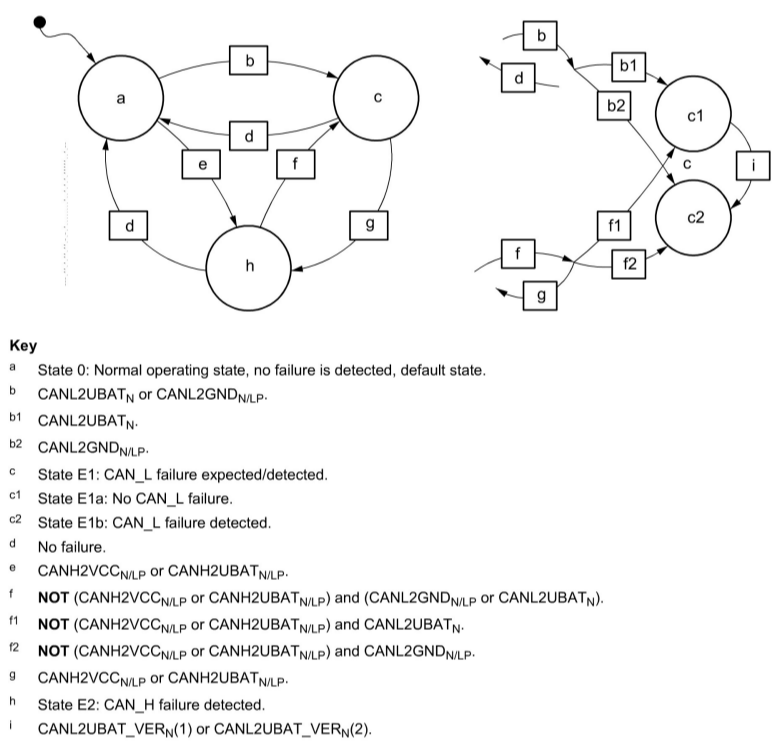
協議規定了以下3種狀態規范:
- 狀態0:正常運行狀態,未檢測到故障,為默認狀態。
- 狀態E1:CAN_L故障
- 狀態E2:CAN_H故障
如下圖,節點的收發器根據檢測到的總線故障變化進行狀態切換。這種容錯機制允許低速容錯CAN在CAN_H或者CAN_L出現故障的情況下,采用單線進行通信。這得益于前面提到的兩點:單線上的信號電平壓差大和旁路接入終端電阻,加上低速本身就具有抗干擾能力,這就是低速容錯CAN實現容錯的原因。
三、低速容錯CAN與高速CAN的對比




: 錯誤和異常)
)



 after argument list)







+xgplayer-hls 播放.m3u8格式視頻)


:Python 概述)