5月29日 ,2025年張江具身智能開發者大會在上海落下帷幕。欣佰特科技作為專注人形機器人與具身智能領域的創新企業,攜一系列前沿產品與解決方案參展,與全球行業專家、企業共同探討技術落地路徑,展現其在具身智能領域的技術積累與場景化應用。
全鏈條人形機器人解決方案
欣佰特科技在展會現場呈現兩大核心解決方案,聚焦技術實用性與行業適配性:具身智能通用系統解決方案借助Captiks動捕系統與 Haption、Haply 力反饋設備采集數據,運用人工智能模型分析優化具身智能算法,再通過 UR、KINOVA 機械臂及 Hello Robot、Mobile Aloha 等平臺驗證算法,覆蓋數據采集、模型訓練、算法驗證全流程。
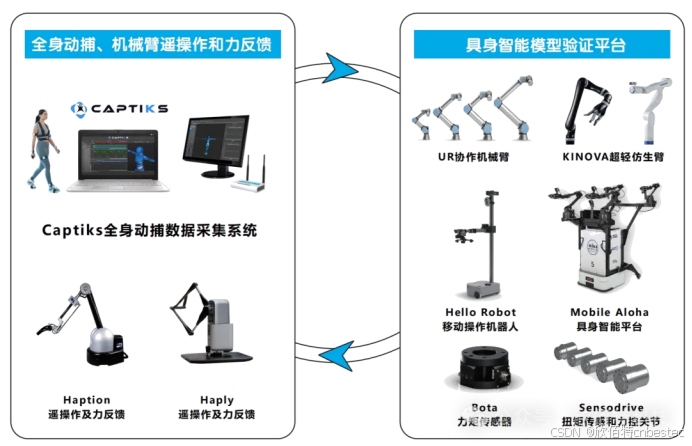
具身智能靈巧手系統解決方案采用Manus手部動捕手套、Senseglove力反饋手套和Weart觸覺反饋手套,不僅能精準捕捉手部動作并將其映射到靈巧手上,還能采集詳細的力觸覺信息作為反饋。接下來,利用深度學習算法優化控制模型,并通過Sarcomere、Tesollo等多種構型的靈巧手結合實際場景來驗證這些算法的有效性,最終實現更加精準的抓取操作。


此外,欣佰特科技特別邀請了XELA Robotics的軟件工程師Keary Mobley,現場展示了XELA的矩陣式三軸觸覺傳感器。這款傳感器具備高密度3軸力測量能力,能精準感知X、Y方向剪切力及Z軸法向力,支持曲面貼合與多形態物體抓取,展現了未來機器人操作的新可能。

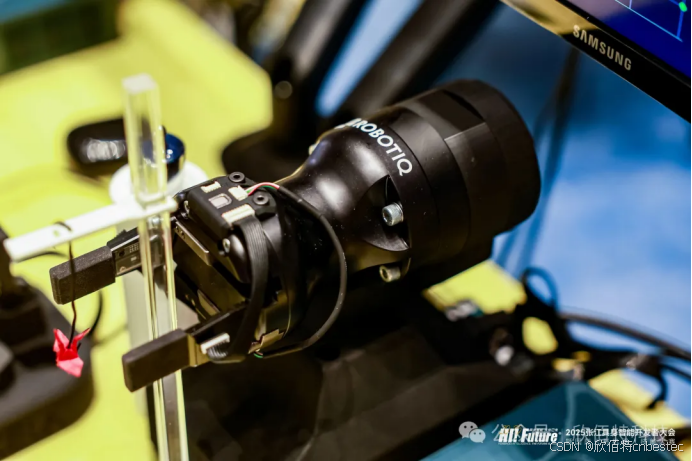

XELA三軸力傳感器陣列uSkin—幫助機械手實現力觸覺
Keary Mobley 發表《為什么觸覺感知對機器人的未來至關重要》主題演講,指出當前機器人依賴視覺與 AI 定位但缺乏觸覺反饋的技術瓶頸,強調觸覺數據在抓握力度控制、物體屬性識別及操作穩定性中的核心作用。他提到,XELA觸覺傳感器通過4線制輕量化設計與柔性材質,已實現與 Allegro Hand四指靈巧手、ROBOTIQ 夾爪等設備的集成,未來將通過自研Ai 軟件實現滑動檢測、抓握預測等功能,推動機器人從 "完成任務"向"精準交互"進化。


2025年張江具身智能開發者大會已落下帷幕,然而欣佰特科技在人形機器人與具身智能領域的探索仍在繼續。未來,欣佰特科技會持續優化產品及解決方案,深化與行業伙伴的交流合作,推動前沿具身智能技術在各行業的應用。

)


——SQL語句改寫(2))







:裁剪與合并命令)


![[AI繪畫]sd學習記錄(二)文生圖參數進階](http://pic.xiahunao.cn/[AI繪畫]sd學習記錄(二)文生圖參數進階)




