無人機橋梁3D建模、巡檢、檢測的航線規劃

無人機在3D建模、巡檢和檢測任務中的航線規劃存在顯著差異,主要體現在飛行高度、航線模式、精度要求和傳感器配置等方面。以下是三者的詳細對比分析:
1. 核心目標差異
| 任務類型 | 主要目標 | 典型應用場景 |
|---|---|---|
| 3D建模 | 生成完整橋梁三維模型 | BIM建模、數字孿生 |
| 巡檢 | 快速篩查表觀病害 | 日常養護、應急檢查 |
| 檢測 | 精準量化結構缺陷 | 專項評估、荷載試驗前檢測 |
2. 航線規劃關鍵參數對比
(1)飛行高度
| 任務類型 | 典型高度范圍 | 調整依據 |
|---|---|---|
| 3D建模 | 15-80m(全局) | 模型精度要求(GSD≤5mm) |
| 巡檢 | 10-30m | 病害可見性(裂縫≥1mm) |
| 檢測 | 0.5-5m(貼壁飛行) | 檢測精度要求(裂縫0.2mm) |
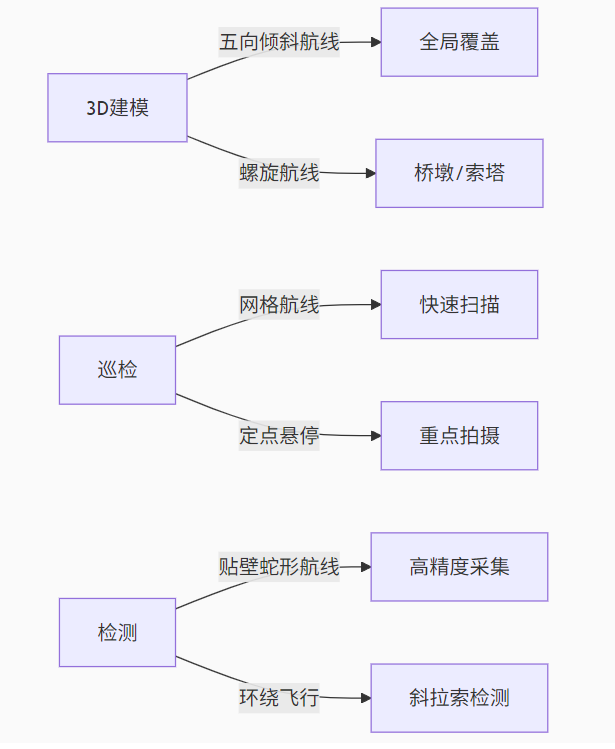
(2)航線模式
(3)重疊率要求
| 任務類型 | 航向重疊率 | 旁向重疊率 | 特殊要求 |
|---|---|---|---|
| 3D建模 | 80%-90% | 70%-80% | 交叉航線夾角≥30° |
| 巡檢 | 70%-80% | 60%-70% | 保證關鍵部位100%覆蓋 |
| 檢測 | 85%-95% | 75%-85% | 病害區域200%重疊補拍 |
3. 傳感器配置差異
| 任務類型 | 典型傳感器 | 數據輸出 |
|---|---|---|
| 3D建模 | 五鏡頭相機/LiDAR | 實景三維模型(OBJ/LAS) |
| 巡檢 | 單目/雙目光學相機 | 正射影像+病害標注圖 |
| 檢測 | 激光雷達+紅外+高分辨率微距相機 | 毫米級點云+熱力圖+缺陷報告 |
4. 典型航線示例
(1)懸索橋主纜檢測
-
3D建模:
50m高度平行掃描+30m高度交叉掃描(生成完整主纜模型) -
巡檢:
20m高度沿主纜走向單航線飛行(快速檢查PE護套破損) -
檢測:
3m高度貼壁環繞飛行(電磁探傷儀檢測內部鋼絲斷裂)
(2)箱梁橋底作業
| 任務類型 | 航線方案 | 耗時對比 |
|---|---|---|
| 3D建模 | 倒飛蛇形航線(距梁底3m) | 40min/跨 |
| 巡檢 | 倒飛直線航線(距梁底5m) | 15min/跨 |
| 檢測 | 分段懸停+多角度拍攝(距梁底1m) | 90min/跨 |
5. 技術發展趨勢
-
智能航線融合:
-
華為河圖引擎實現建模/巡檢航線自動切換
-
-
動態避障升級:
-
大疆Mavic 3E新增斜拉索識別避障模式
-
-
標準統一化:
-
新修訂《公路無人機檢測規程》(JTG/T 3XXX-2024)將明確分類航線標準
-
結論建議
-
新建項目優先采用"建模級航線"生成數字底圖
-
日常養護用巡檢航線(效率提升3-5倍)
-
發現隱患時啟動檢測級精細航線
-
未來方向:AI自主決策航線類型(如識別裂縫后自動切換檢測模式)
三種航線規劃本質是精度與效率的權衡,實際作業中常采用"先建模定位→再巡檢篩查→最后檢測復核"的遞進策略。









)





認證)



