四軸飛行器(STM32)
想要更多項目私wo!!!
四軸飛行器是一種通過四個旋翼產生的升力實現飛行的無人機,其核心控制原理基于歐拉角動力學模型。四軸飛行器通過改變四個電機的轉速來實現六自由度控制(前后、左右、上下移動和俯仰、橫滾、偏航旋轉)
核心控制原理:
姿態感知:通過MPU6050/MPU9250等慣性測量單元獲取飛行器的三軸加速度和三軸角速度數據
姿態解算:使用互補濾波或卡爾曼濾波算法將傳感器數據轉換為歐拉角(俯仰、橫滾、偏航)
控制算法:采用串級PID控制,內環控制角速度,外環控制角度
電機混控:將控制量分配到四個電機,實現穩定飛行
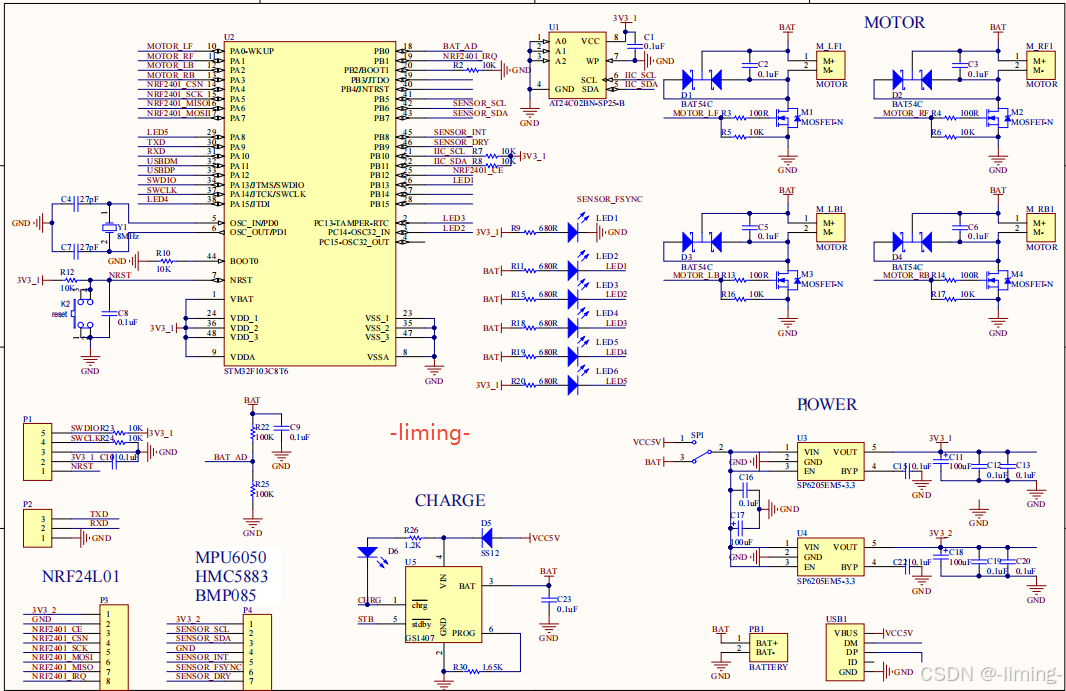
二、系統總體框圖
飛控原理圖
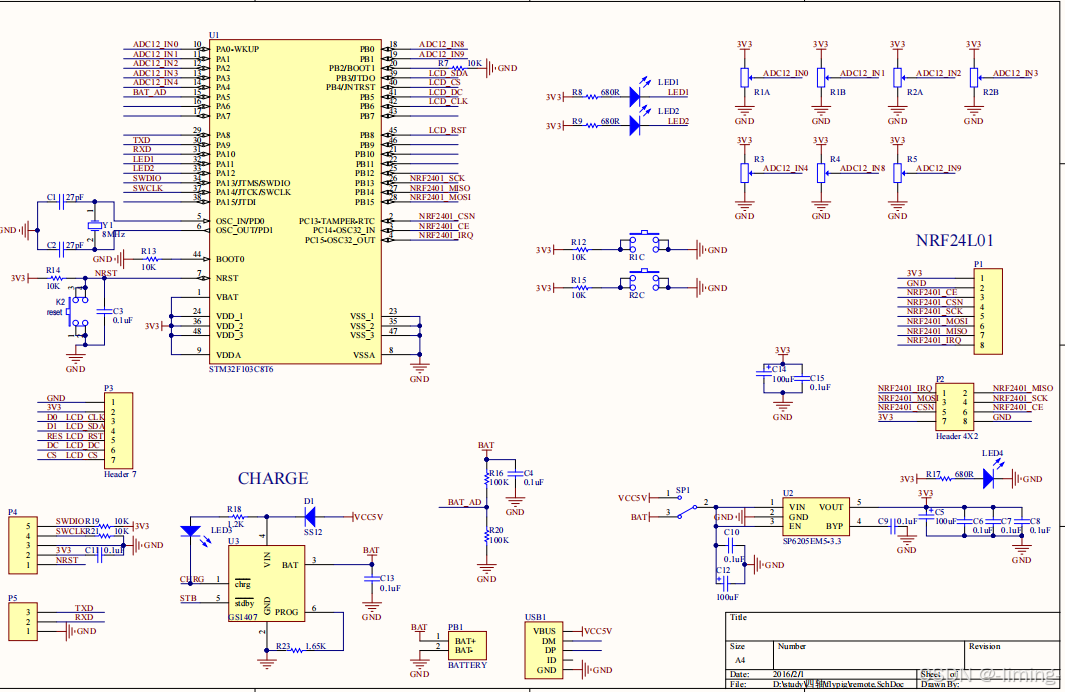
遙控器原理圖
三、部分代碼
#include "control.h"
#include "BSP.H"
#include "rc.h"
#include "imu.h"
#include "uart1.h"
PID PID_ROL,PID_PIT,PID_YAW;
u8 ARMED = 0;
extern vs16 QH,ZY,XZ;float Get_MxMi(float num,float max,float min)
{if(num>max)return max;else if(num<min)return min;elsereturn num;
}void CONTROL(float rol_now, float pit_now, float yaw_now, float rol_tar, float pit_tar, float yaw_tar)
{ //當前姿態角,,,目標姿態角u16 moto1=0,moto2=0,moto3=0,moto4=0;vs16 throttle;
// u8 moto[8];float rol = rol_tar + rol_now;float pit = pit_tar + pit_now;float yaw = yaw_tar + yaw_now;throttle = Rc_Get.THROTTLE - 1000; //1000<遙控油門值<2000if(throttle<0) throttle=0;PID_ROL.IMAX = throttle/10; //積分限幅,積分值不超過當前油門值的一半PID_ROL.IMAX = Get_MxMi(PID_ROL.IMAX,1000,0); //限制積分結果為,0到1000 PID_PIT.IMAX = PID_ROL.IMAX;PID_ROL.pout = PID_ROL.P * rol;PID_PIT.pout = PID_PIT.P * pit;
//、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、 /0.1 0.1 30 30if(rol_tar*rol_tar<1 && pit_tar*pit_tar<1 && rol_now*rol_now<100 && pit_now*pit_now<100 && throttle>300){ //防止角度大了,積分超調//目標姿態角水平,姿態角幾乎水平,油門值不太低PID_ROL.iout += PID_ROL.I * rol;PID_PIT.iout += PID_PIT.I * pit;PID_ROL.iout = Get_MxMi(PID_ROL.iout,PID_ROL.IMAX,-PID_ROL.IMAX); //對輸出的積分限幅PID_PIT.iout = Get_MxMi(PID_PIT.iout,PID_PIT.IMAX,-PID_PIT.IMAX);}else if(throttle<200){ //油門值較小時,積分項清零PID_ROL.iout = 0;PID_PIT.iout = 0;}
//、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、 // rc_roll_d = rol_tar - getlast_roll;
// getlast_roll = rol_tar;
// PID_ROL.dout = PID_ROL.D * (MPU6050_GYRO_LAST.X+rc_roll_d*300);//角速度+控制誤差微分
//
// rc_pitch_d = pit_tar - getlast_pitch;
// getlast_pitch = pit_tar;
// PID_PIT.dout = PID_PIT.D * (MPU6050_GYRO_LAST.Y+rc_pitch_d*300);//角速度+控制誤差微分PID_ROL.dout = PID_ROL.D * MPU6050_GYRO_LAST.X; PID_PIT.dout = PID_PIT.D * MPU6050_GYRO_LAST.Y;
/PID_YAW.pout = PID_YAW.P * yaw;//若 *yaw_now;鎖尾模式!!!!//若 *yaw; 非鎖尾模式!!!!
/vs16 yaw_d;/if(1480>Rc_Get.YAW || Rc_Get.YAW>1520) //給遙控加死區(偏航角的死區){yaw_d = MPU6050_GYRO_LAST.Z + (Rc_Get.YAW-1500)*10; //用Z軸角速度及目標偏航角值進行四軸運動的預判GYRO_I.Z = 0;}elseyaw_d = MPU6050_GYRO_LAST.Z;PID_YAW.dout = PID_YAW.D * yaw_d;
/ PID_ROL.OUT = PID_ROL.pout + PID_ROL.iout + PID_ROL.dout;PID_PIT.OUT = PID_PIT.pout + PID_PIT.iout + PID_PIT.dout;PID_YAW.OUT = PID_YAW.pout + PID_YAW.iout + PID_YAW.dout;if(throttle>200) //油門值大于200才起飛 (遙控油門值大于1200){
// moto1 = throttle - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
// moto2 = throttle - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
// moto3 = throttle + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
// moto4 = throttle + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;// moto4 = throttle - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
// moto3 = throttle - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
// moto2 = throttle + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
// moto1 = throttle + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT; // moto1 = throttle - 25 + QH + ZY - XZ - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
// moto2 = throttle - 25 + QH - ZY + XZ - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
// moto3 = throttle - 25 - QH + ZY + XZ + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
// moto4 = throttle + 75 - QH - ZY - XZ + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;moto4 = throttle + QH + ZY - XZ - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;moto3 = throttle + QH - ZY + XZ - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;moto2 = throttle - QH + ZY + XZ + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;moto1 = throttle - QH - ZY - XZ + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;// moto1 = throttle;
// moto2 = throttle;
// moto3 = throttle;
// moto4 = throttle;}else{moto1 = 0;moto2 = 0;moto3 = 0;moto4 = 0;}// moto[1] = moto1 & 0xFF;
// moto[0] = (moto1>>8) & 0xFF;
// moto[3] = moto2 & 0xFF;
// moto[2] = (moto2>>8) & 0xFF;
// moto[5] = moto3 & 0xFF;
// moto[4] = (moto3>>8) & 0xFF;
// moto[7] = moto4 & 0xFF;
// moto[6] = (moto4>>8) & 0xFF; //Uart1_Send_Buf(moto,8); if(ARMED) Moto_PwmRflash(moto1,moto2,moto3,moto4); //未解鎖則空心杯不轉 ARMED=1則解鎖else Moto_PwmRflash(0,0,0,0);
}










 OTA升級服務開發(差分升級、回滾機制))

)

)

:頁面)

