1. 概述
Systemd 是一系列工具的集合,其作用也遠遠不僅是啟動操作系統,它還接管了后臺服務、結束、狀態查詢,以及日志歸檔、設備管理、電源管理、定時任務等許多職責,并支持通過特定事件(如插入特定 USB 設備)和特定端口數據觸發的 On-demand(按需)任務。
Systemd 的后臺服務還有一個特殊的身份——它是系統中 PID 值為 1 的進程。
主要功能:支持并行化任務;同時采用 socket 式與 D-Bus 總線式激活服務;按需啟動守護進程(daemon);利用 Linux 的 cgroups 監視進程;支持快照和系統恢復;維護掛載點和自動掛載點;各服務間基于依賴關系進行精密控制。systemd 支持 SysV 和 LSB 初始腳本,可以替代 sysvinit。除此之外,功能還包括日志進程、控制基礎系統配置,維護登陸用戶列表以及系統賬戶、運行時目錄和設置,可以運行容器和虛擬機,可以簡單的管理網絡配置、網絡時間同步、日志轉發和名稱解析等。
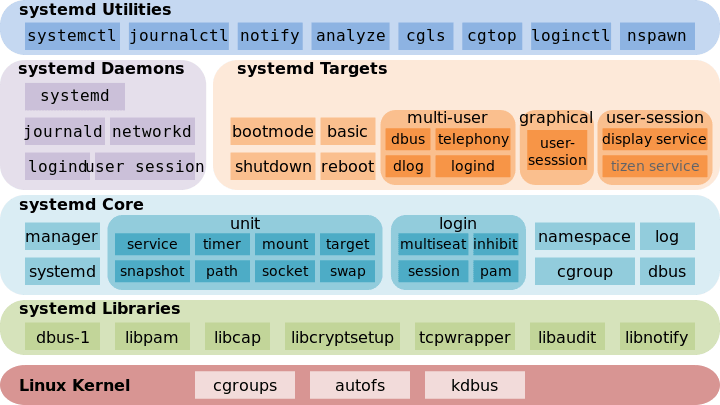
整體架構:
2. Unit
2.1 定義及類型
Systemd 可以管理所有系統資源,不同的資源統稱為Unit(單位)。在Systemd的生態圈中,Unit文件統一了過去各種不同系統資源配置格式,例如服務的啟/停、定時任務、設備自動掛載、網絡配置、虛擬內存配置等。而?Systemd 通過不同的文件后綴來區分這些配置文件。Unit 是 Systemd 管理系統資源的基本單元,可以認為每個系統資源就是一個 Unit,并使用一個 Unit 文件定義。在 Unit 文件中需要包含相應服務的描述、屬性以及需要運行的命令。Target 是 Systemd 中用于指定系統資源啟動組的方式,相當于 SysV-init 中的運行級別。簡單說,Target 就是一個 Unit 組,包含許多相關的 Unit 。啟動某個 Target 的時候,Systemd 就會啟動里面所有的 Unit。從這個意義上說,Target 這個概念類似于”狀態點”,啟動某個 Target 就好比啟動到某種狀態。
12 種 Unit 文件類型:
- .automount:用于控制自動掛載文件系統,相當于 SysV-init 的 autofs 服務
- .device:對于 /dev 目錄下的設備,主要用于定義設備之間的依賴關系
- .mount:定義系統結構層次中的一個掛載點,可以替代過去的 /etc/fstab 配置文件
- .path:用于監控指定目錄或文件的變化,并觸發其它 Unit 運行
- .scope:這種 Unit 文件不是用戶創建的,而是 Systemd 運行時產生的,描述一些系統服務的分組信息
- .service:封裝守護進程的啟動、停止、重啟和重載操作,是最常見的一種 Unit 文件
- .slice:用于表示一個 CGroup 的樹,通常用戶不會自己創建這樣的 Unit 文件
- .snapshot:用于表示一個由 systemctl snapshot 命令創建的 Systemd Units 運行狀態快照
- .socket:監控來自于系統或網絡的數據消息,用于實現基于數據自動觸發服務啟動
- .swap:定義一個用戶做虛擬內存的交換分區
- .target:用于對 Unit 文件進行邏輯分組,引導其它 Unit 的執行。它替代了 SysV-init 運行級別的作用,并提供更靈活的基于特定設備事件的啟動方式
- .timer:用于配置在特定時間觸發的任務,替代了 Crontab 的功能
2.2 Systemd 目錄
Unit 文件按照 Systemd 約定,應該被放置指定的三個系統目錄之一中。這三個目錄是有優先級的,如下所示,越靠上的優先級越高。因此,在三個目錄中有同名文件的時候,只有優先級最高的目錄里的那個文件會被使用。
- /etc/systemd/system:系統或用戶自定義的配置文件
- /run/systemd/system:軟件運行時生成的配置文件
- /usr/lib/systemd/system:系統或第三方軟件安裝時添加的配置文件
Systemd 默認從目錄 /etc/systemd/system/ 讀取配置文件。但是,里面存放的大部分文件都是符號鏈接,指向目錄 /usr/lib/systemd/system/,真正的配置文件存放在那個目錄。
systemd 單元名僅能包含 ASCII 字符,下劃線和點號和有特殊意義的字符(’@’, ‘-’)。其它字符需要用 C-style “\x2d” 替換。參閱 systemd.unit(5) 和 systemd-escape(1) 。單元文件的語法,可以參考系統已經安裝的單元,也可以參考 systemd.service(5) 中的EXAMPLES章節。(在終端中運行:man 5 systemd.unit,man 1 systemd-escape 等查看)
提示: 以 # 開頭的注釋可能也能用在 unit-files 中,但是只能在新行中使用。不要在 systemd 的參數后面使用行末注釋, 否則 unit 將會啟動失敗。
2.3 Unit文件結構
[Unit]
Description=Hello World
After=docker.service
Requires=docker.service
[Service]
TimeoutStartSec=0
ExecStartPre=-/usr/bin/docker kill busybox1
ExecStartPre=-/usr/bin/docker rm busybox1
ExecStartPre=/usr/bin/docker pull busybox
ExecStart=/usr/bin/docker run --name busybox1 busybox /bin/ sh -c "while true; do echo Hello World; sleep 1; done"
ExecStop="/usr/bin/docker stop busybox1"
ExecStopPost="/usr/bin/docker rm busybox1"
[Install]
WantedBy=multi-user.targetSystemd 服務的 Unit 文件可以分為三個配置區段:
- Unit 和 Install 段:所有 Unit 文件通用,用于配置服務(或其它系統資源)的描述、依賴和隨系統啟動的方式
- Service 段:服務(Service)類型的 Unit 文件(后綴為 .service)特有的,用于定義服務的具體管理和操作方法
1)Unit 段
- Description:描述這個 Unit 文件的信息
- Documentation:指定服務的文檔,可以是一個或多個文檔的 URL 路徑
- Requires:依賴的其它 Unit 列表,列在其中的 Unit 模板會在這個服務啟動時的同時被啟動。并且,如果其中任意一個服務啟動失敗,這個服務也會被終止
- Wants:與 Requires 相似,但只是在被配置的這個 Unit 啟動時,觸發啟動列出的每個 Unit 模塊,而不去考慮這些模板啟動是否成功
- After:與 Requires 相似,但是在后面列出的所有模塊全部啟動完成以后,才會啟動當前的服務
- Before:與 After 相反,在啟動指定的任務一個模塊之間,都會首先確證當前服務已經運行
- Binds To:與 Requires 相似,失敗時失敗,成功時成功,但是在這些模板中有任意一個出現意外結束或重啟時,這個服務也會跟著終止或重啟
- Part Of:一個 Bind To 作用的子集,僅在列出的任務模塊失敗或重啟時,終止或重啟當前服務,而不會隨列出模板的啟動而啟動
- OnFailure:當這個模板啟動失敗時,就會自動啟動列出的每個模塊
- Conflicts:與這個模塊有沖突的模塊,如果列出的模塊中有已經在運行的,這個服務就不能啟動,反之亦然
2)Install 段
這部分配置的目標模塊通常是特定運行目標的 .target 文件,用來使得服務在系統啟動時自動運行。這個區段可以包含三種啟動約束:
- WantedBy:和 Unit 段的 Wants 作用相似,只有后面列出的不是服務所依賴的模塊,而是依賴當前服務的模塊。它的值是一個或多個 Target,當前 Unit 激活時(enable)符號鏈接會放入 /etc/systemd/system 目錄下面以 <Target 名> + .wants 后綴構成的子目錄中,如 “/etc/systemd/system/multi-user.target.wants/“
- RequiredBy:和 Unit 段的 Wants 作用相似,只有后面列出的不是服務所依賴的模塊,而是依賴當前服務的模塊。它的值是一個或多個 Target,當前 Unit 激活時,符號鏈接會放入 /etc/systemd/system 目錄下面以 <Target 名> + .required 后綴構成的子目錄中
- Also:當前 Unit enable/disable 時,同時 enable/disable 的其他 Unit
- Alias:當前 Unit 可用于啟動的別名
3)Service 段
用來 Service 的配置,只有 Service 類型的 Unit 才有這個區塊。它的主要字段分為服務生命周期和服務上下文配置兩個方面。
(1)服務生命周期控制相關
- Type:定義啟動時的進程行為,它有以下幾種值:
? ? ? ? Type=simple:默認值,執行ExecStart指定的命令,啟動主進程
? ? ? ? Type=forking:以 fork 方式從父進程創建子進程,創建后父進程會立即退出
? ? ? ? Type=oneshot:一次性進程,Systemd 會等當前服務退出,再繼續往下執行
? ? ? ? Type=dbus:當前服務通過D-Bus啟動
? ? ? ? Type=notify:當前服務啟動完畢,會通知Systemd,再繼續往下執行
? ? ? ? Type=idle:若有其他任務執行完畢,當前服務才會運行
- RemainAfterExit:值為 true 或 false(默認)。當配置為 true 時,Systemd 只會負責啟動服務進程,之后即便服務進程退出了,Systemd 也仍然會認為這個服務還在運行中。這個配置主要是提供給一些并非常駐內存,而是啟動注冊后立即退出,然后等待消息按需啟動的特殊類型服務使用的。
- ExecStart:啟動當前服務的命令
- ExecStartPre:啟動當前服務之前執行的命令
- ExecStartPos:啟動當前服務之后執行的命令
- ExecReload:重啟當前服務時執行的命令
- ExecStop:停止當前服務時執行的命令
- ExecStopPost:停止當其服務之后執行的命令
- RestartSec:自動重啟當前服務間隔的秒數
- Restart:定義何種情況 Systemd 會自動重啟當前服務,可能的值包括 always(總是重啟)、on-success、on-failure、on-abnormal、on-abort、on-watchdog
- TimeoutStartSec:啟動服務時等待的秒數,這一配置對于使用 Docker 容器而言顯得尤為重要,因其第一次運行時可能需要下載鏡像,嚴重延時會容易被 Systemd 誤判為啟動失敗殺死。通常,對于這種服務,將此值指定為 0,從而關閉超時檢測
- TimeoutStopSec:停止服務時的等待秒數,如果超過這個時間仍然沒有停止,Systemd 會使用 SIGKILL 信號強行殺死服務的進程
(2)服務上下文配置相關
- Environment:為服務指定環境變量
- EnvironmentFile:指定加載一個包含服務所需的環境變量的列表的文件,文件中的每一行都是一個環境變量的定義
- Nice:服務的進程優先級,值越小優先級越高,默認為 0。其中 -20 為最高優先級,19 為最低優先級
- WorkingDirectory:指定服務的工作目錄
- RootDirectory:指定服務進程的根目錄(/ 目錄)。如果配置了這個參數,服務將無法訪問指定目錄以外的任何文件
- User:指定運行服務的用戶
- Group:指定運行服務的用戶組
- MountFlags:服務的 Mount Namespace 配置,會影響進程上下文中掛載點的信息,即服務是否會繼承主機上已有掛載點,以及如果服務運行執行了掛載或卸載設備的操作,是否會真實地在主機上產生效果。可選值為 shared、slaved 或 private。
? ? ? ? shared:服務與主機共用一個 Mount Namespace,繼承主機掛載點,且服務掛載或卸載設備會真實地反映到主機上
? ? ? ? slave:服務使用獨立的 Mount Namespace,它會繼承主機掛載點,但服務對掛載點的操作只有在自己的 Namespace 內生效,不會反映到主機上
? ? ? ? private:服務使用獨立的 Mount Namespace,它在啟動時沒有任何任何掛載點,服務對掛載點的操作也不會反映到主機上
- LimitCPU / LimitSTACK / LimitNOFILE / LimitNPROC 等:限制特定服務的系統資源量,例如 CPU、程序堆棧、文件句柄數量、子進程數量等
注意:如果在 ExecStart、ExecStop 等屬性中使用了 Linux 命令,則必須要寫出完整的絕對路徑。對于 ExecStartPre 和 ExecStartPost 輔助命令,若前面有個 “-” 符號,表示忽略這些命令的出錯。因為有些 “輔助” 命令本來就不一定成功,比如嘗試清空一個文件,但文件可能不存在。
2.4 Unit 文件占位符
在 Unit 文件中,有時會需要使用到一些與運行環境有關的信息,例如節點 ID、運行服務的用戶等。這些信息可以使用占位符來表示,然后在實際運行被動態地替換實際的值。
- %n:完整的 Unit 文件名字,包括 .service 后綴名
- %p:Unit 模板文件名中 @ 符號之前的部分,不包括 @ 符號
- %i:Unit 模板文件名中 @ 符號之后的部分,不包括 @ 符號和 .service 后綴名
- %t:存放系統運行文件的目錄,通常是 “run”
- %u:運行服務的用戶,如果 Unit 文件中沒有指定,則默認為 root
- %U:運行服務的用戶 ID
- %h:運行服務的用戶 Home 目錄,即 %{HOME} 環境變量的值
- %s:運行服務的用戶默認 Shell 類型,即 %{SHELL} 環境變量的值
- %m:實際運行節點的 Machine ID,對于運行位置每個的服務比較有用
- %b:Boot ID,這是一個隨機數,每個節點各不相同,并且每次節點重啟時都會改變
- %H:實際運行節點的主機名
- %v:內核版本,即 “uname -r” 命令輸出的內容
- %%:在 Unit 模板文件中表示一個普通的百分號
2.5 Unit 模板
在現實中,往往有一些應用需要被復制多份運行。例如,用于同一個負載均衡器分流的多個服務實例,或者為每個 SSH 連接建立一個獨立的 sshd 服務進程。
Unit 模板文件的寫法與普通的服務 Unit 文件基本相同,不過 Unit 模板的文件名是以 @ 符號結尾的。通過模板啟動服務實例時,需要在其文件名的 @ 字符后面附加一個參數字符串。
樣例:apache@.service
- apache@.service 模板
[Unit]
Description=My Advanced Service Template
After=etcd.service docker.service
[Service]
TimeoutStartSec=0
ExecStartPre=-/usr/bin/docker kill apache%i
ExecStartPre=-/usr/bin/docker rm apache%i
ExecStartPre=/usr/bin/docker pull coreos/apache
ExecStart=/usr/bin/docker run --name apache%i -p %i:80 coreos/apache /usr/sbin/apache2ctl -D FOREGROUND
ExecStartPost=/usr/bin/etcdctl set /domains/example.com/%H:%i running
ExecStop=/usr/bin/docker stop apache1
ExecStopPost=/usr/bin/docker rm apache1
ExecStopPost=/usr/bin/etcdctl rm /domains/example.com/%H:%i
[Install]
WantedBy=multi-user.target- 啟動 Unit 模板的服務實例
在服務啟動時需要在 @ 后面放置一個用于區分服務實例的附加字符參數,通常這個參數用于監控的端口號或控制臺 TTY 編譯號。
systemctl start apache@8080.serviceSystemd 在運行服務時,總是會先嘗試找到一個完整匹配的 Unit 文件,如果沒有找到,才會嘗試選擇匹配模板。例如上面的命令,System 首先會在約定的目錄下尋找名為 apache@8080.service 的文件,如果沒有找到,而文件名中包含 @ 字符,它就會嘗試去掉后綴參數匹配模板文件。對于 apache@8080.service,systemd 會找到 apache@.service 模板文件,并通過這個模板文件將服務實例化。
3. 命令工具
3.1 systemctl
systemctl是?Systemd 的主命令,用于管理系統。systemctl命令主要有兩大功能:控制systemd系統和管理系統上運行的服務。
通過?systemctl --help?可以查看到所有相關信息。
在?systemctl 參數中添加 -H <用戶名>@<主機名> 可以實現對其他機器的遠程控制。該功能使用 SSH 連接。
1)常用指令
# 列出正在運行的 Unit
$ systemctl list-units# 列出所有Unit,包括沒有找到配置文件的或者啟動失敗的
$ systemctl list-units --all# 列出所有沒有運行的 Unit
$ systemctl list-units --all --state=inactive# 列出所有加載失敗的 Unit
$ systemctl list-units --failed# 列出所有正在運行的、類型為 service 的 Unit
$ systemctl list-units --type=service# 查看 Unit 配置文件的內容
$ systemctl cat docker.service查看unit狀態:
- enabled:已建立啟動鏈接
- disabled:沒建立啟動鏈接
- static:該配置文件沒有 [Install] 部分(無法執行),只能作為其他配置文件的依賴
- masked:該配置文件被禁止建立啟動鏈接
# 顯示系統狀態
$ systemctl status# 顯示單個 Unit 的狀態
$ ystemctl status bluetooth.service# 顯示遠程主機的某個 Unit 的狀態
$ systemctl -H root@rhel7.example.com status httpd.serviceunit管理:
# 立即啟動一個服務
$ sudo systemctl start apache.service# 立即停止一個服務
$ sudo systemctl stop apache.service# 重啟一個服務
$ sudo systemctl restart apache.service# 殺死一個服務的所有子進程
$ sudo systemctl kill apache.service# 重新加載一個服務的配置文件
$ sudo systemctl reload apache.service# 重載所有修改過的配置文件
$ sudo systemctl daemon-reload# 顯示某個 Unit 的所有底層參數
$ systemctl show httpd.service# 顯示某個 Unit 的指定屬性的值
$ systemctl show -p CPUShares httpd.service# 設置某個 Unit 的指定屬性
$ sudo systemctl set-property httpd.service CPUShares=500查看 Unit 的依賴關系:
# 列出一個 Unit 的所有依賴,默認不會列出 target 類型
$ systemctl list-dependencies nginx.service# 列出一個 Unit 的所有依賴,包括 target 類型
$ systemctl list-dependencies --all nginx.service3.2 服務的生命周期
當一個新的 Unit 文件被放入 /etc/systemd/system/ 或 /usr/lib/systemd/system/ 目錄中時,它是不會被自識識別的。
1)服務的激活
systemctl enable:在 /etc/systemd/system/ 建立服務的符號鏈接,指向 /usr/lib/systemd/system/ 中
systemctl start:依次啟動定義在 Unit 文件中的 ExecStartPre、ExecStart 和 ExecStartPost 命令
2)服務的啟動和停止
systemctl start:依次啟動定義在 Unit 文件中的 ExecStartPre、ExecStart 和 ExecStartPost 命令
systemctl stop:依次停止定義在 Unit 文件中的 ExecStopPre、ExecStop 和 ExecStopPost 命令
systemctl restart:重啟服務
systemctl kill:立即殺死服務
3)服務的開機啟動和取消
systemctl enable:除了激活服務以外,也可以置服務為開機啟動
systemctl disable:取消服務的開機啟動
4)服務的修改和移除
systemctl daemon-reload:Systemd 會將 Unit 文件的內容寫到緩存中,因此當 Unit 文件被更新時,需要告訴 Systemd 重新讀取所有的 Unit 文件
systemctl reset-failed:移除標記為丟失的 Unit 文件。在刪除 Unit 文件后,由于緩存的關系,即使通過 daemon-reload 更新了緩存,在 list-units 中依然會顯示標記為 not-found 的 Unit。
3.3 Target 管理
Target 就是一個 Unit 組,包含許多相關的 Unit 。啟動某個 Target 的時候,Systemd 就會啟動里面所有的 Unit。
在傳統的 SysV-init 啟動模式里面,有 RunLevel 的概念,跟 Target 的作用很類似。不同的是,RunLevel 是互斥的,不可能多個 RunLevel 同時啟動,但是多個 Target 可以同時啟動。
# 查看當前系統的所有 Target
$ systemctl list-unit-files --type=target# 查看一個 Target 包含的所有 Unit
$ systemctl list-dependencies multi-user.target# 查看啟動時的默認 Target
$ systemctl get-default# 設置啟動時的默認 Target
$ sudo systemctl set-default multi-user.target# 切換 Target 時,默認不關閉前一個 Target 啟動的進程,systemctl isolate 命令改變這種行為,關閉前一個 Target 里面所有不屬于后一個 Target 的進程
$ sudo systemctl isolate multi-user.targetTarget 與 SysV-init 進程的主要區別:
- 默認的 RunLevel(在 /etc/inittab 文件設置)現在被默認的 Target 取代,位置是 /etc/systemd/system/default.target,通常符號鏈接到graphical.target(圖形界面)或者multi-user.target(多用戶命令行)。
- 啟動腳本的位置,以前是 /etc/init.d 目錄,符號鏈接到不同的 RunLevel 目錄 (比如 /etc/rc3.d、/etc/rc5.d 等),現在則存放在 /lib/systemd/system 和 /etc/systemd/system 目錄。
- 配置文件的位置,以前 init 進程的配置文件是 /etc/inittab,各種服務的配置文件存放在 /etc/sysconfig 目錄。現在的配置文件主要存放在 /lib/systemd 目錄,在 /etc/systemd 目錄里面的修改可以覆蓋原始設置。
3.4 日志管理
Systemd 通過其標準日志服務 Journald 提供的配套程序?journalctl?將其管理的所有后臺進程打印到 std:out(即控制臺)的輸出重定向到了日志文件。
Systemd 的日志文件是二進制格式的,必須使用 Journald 提供的 journalctl 來查看,默認不帶任何參數時會輸出系統和所有后臺進程的混合日志。
默認日志最大限制為所在文件系統容量的 10%,可以修改 /etc/systemd/journald.conf 中的 SystemMaxUse 來指定該最大限制。
# 查看所有日志(默認情況下 ,只保存本次啟動的日志)
$ sudo journalctl# 查看內核日志(不顯示應用日志):--dmesg 或 -k
$ sudo journalctl -k# 查看系統本次啟動的日志(其中包括了內核日志和各類系統服務的控制臺輸出):--system 或 -b
$ sudo journalctl -b
$ sudo journalctl -b -0# 查看上一次啟動的日志(需更改設置)
$ sudo journalctl -b -1# 查看指定服務的日志:--unit 或 -u
$ sudo journalctl -u docker.servcie# 查看指定服務的日志
$ sudo journalctl /usr/lib/systemd/systemd# 實時滾動顯示最新日志
$ sudo journalctl -f# 查看指定時間的日志
$ sudo journalctl --since="2012-10-30 18:17:16"
$ sudo journalctl --since "20 min ago"
$ sudo journalctl --since yesterday
$ sudo journalctl --since "2015-01-10" --until "2015-01-11 03:00"
$ sudo journalctl --since 09:00 --until "1 hour ago"# 顯示尾部的最新 10 行日志:--lines 或 -n
$ sudo journalctl -n# 顯示尾部指定行數的日志
$ sudo journalctl -n 20# 將最新的日志顯示在前面
$ sudo journalctl -r -u docker.service# 改變輸出的格式:--output 或 -o
$ sudo journalctl -r -u docker.service -o json-pretty# 查看指定進程的日志
$ sudo journalctl _PID=1# 查看某個路徑的腳本的日志
$ sudo journalctl /usr/bin/bash# 查看指定用戶的日志
$ sudo journalctl _UID=33 --since today# 查看某個 Unit 的日志
$ sudo journalctl -u nginx.service
$ sudo journalctl -u nginx.service --since today# 實時滾動顯示某個 Unit 的最新日志
$ sudo journalctl -u nginx.service -f# 合并顯示多個 Unit 的日志
$ journalctl -u nginx.service -u php-fpm.service --since today# 查看指定優先級(及其以上級別)的日志,共有 8 級
# 0: emerg
# 1: alert
# 2: crit
# 3: err
# 4: warning
# 5: notice
# 6: info
# 7: debug
$ sudo journalctl -p err -b# 日志默認分頁輸出,--no-pager 改為正常的標準輸出
$ sudo journalctl --no-pager# 以 JSON 格式(單行)輸出
$ sudo journalctl -b -u nginx.service -o json# 以 JSON 格式(多行)輸出,可讀性更好
$ sudo journalctl -b -u nginx.serviceqq-o json-pretty# 顯示日志占據的硬盤空間
$ sudo journalctl --disk-usage# 指定日志文件占據的最大空間
$ sudo journalctl --vacuum-size=1G# 指定日志文件保存多久
$ sudo journalctl --vacuum-time=1years4. Systemd工具集
- systemctl:用于檢查和控制各種系統服務和資源的狀態
- bootctl:用于查看和管理系統啟動分區
- hostnamectl:用于查看和修改系統的主機名和主機信息
- journalctl:用于查看系統日志和各類應用服務日志
- localectl:用于查看和管理系統的地區信息
- loginctl:用于管理系統已登錄用戶和 Session 的信息
- machinectl:用于操作 Systemd 容器
- timedatectl:用于查看和管理系統的時間和時區信息
- systemd-analyze 顯示此次系統啟動時運行每個服務所消耗的時間,可以用于分析系統啟動過程中的性能瓶頸
- systemd-ask-password:輔助性工具,用星號屏蔽用戶的任意輸入,然后返回實際輸入的內容
- systemd-cat:用于將其他命令的輸出重定向到系統日志
- systemd-cgls:遞歸地顯示指定 CGroup 的繼承鏈
- systemd-cgtop:顯示系統當前最耗資源的 CGroup 單元
- systemd-escape:輔助性工具,用于去除指定字符串中不能作為 Unit 文件名的字符
- systemd-hwdb:Systemd 的內部工具,用于更新硬件數據庫
- systemd-delta:對比當前系統配置與默認系統配置的差異
- systemd-detect-virt:顯示主機的虛擬化類型
- systemd-inhibit:用于強制延遲或禁止系統的關閉、睡眠和待機事件
- systemd-machine-id-setup:Systemd 的內部工具,用于給 Systemd 容器生成 ID
- systemd-notify:Systemd 的內部工具,用于通知服務的狀態變化
- systemd-nspawn:用于創建 Systemd 容器
- systemd-path:Systemd 的內部工具,用于顯示系統上下文中的各種路徑配置
- systemd-run:用于將任意指定的命令包裝成一個臨時的后臺服務運行
- systemd-stdio- bridge:Systemd 的內部 工具,用于將程序的標準輸入輸出重定向到系統總線
- systemd-tmpfiles:Systemd 的內部工具,用于創建和管理臨時文件目錄
- systemd-tty-ask-password-agent:用于響應后臺服務進程發出的輸入密碼請求
具體每個工具的使用,請通過 --help 查看。
5. 應用示例
1)自啟動后臺服務
[Unit]
Description=The HTTP and reverse proxy server
After=network.target remote-fs.target nss-lookup.target
Wants=network.target[Service]
Type=simple
ExecStart=/usr/local/xxxx/xxxx -c /usr/local/xxxx/xxx.ini
Restart=on-failure
RestartSec=15
KillSignal=SIGQUIT
TimeoutStopSec=5
KillMode=process
PrivateTmp=true
StandardOutput=syslog
StandardError=inherit[Install]
WantedBy=multi-user.target(持續更新)









位置編碼(1))









