發那科機器人4(編程實例)
- 一、編程實例
- 1、直線運動實例
- 2、圓弧運動實例
- 3、曲線運動實例
- 4、物料搬運實例
- 5、異步輸送帶檢測
一、編程實例
1、直線運動實例
本節內容:直線運動實例
本次實例,采用的是基礎模塊,以基礎模塊當中的四邊形為例,演示一下機器人的直線運動。
編程前,首先需要完成一些編程前的準備工作:
①將基礎模塊安裝在扇形板上,也就是工作臺面上;
②將工具安裝在機器人的法蘭盤末端;
③將機器人控制器模式開關選擇打到手動,也就是T1模式;
④建立相應的工具以及用戶坐標系。
開始編程,
創建程序名
首先我們按一下select鍵,進入程序預覽畫面。按一下F2鍵,創建一個程序名(以直線的漢語拼音作為程序名),命名時,不能以數字開頭;
程序的編輯
程序名稱創建完成之后,按下enter鍵確認進入ZHIXIAN程序的編輯界面。
在準備工作時,已經建立了 用戶坐標系1 以及 工具用坐標系1 ,在此直接調用即可;
坐標系選擇指令書寫
我們按下NEXT的鍵,切換功能鍵菜單,按下F1鍵指令,選擇坐標系,選擇用戶坐標系選擇指令,然后按一下常數,輸入數字1。同樣選擇工具坐標系選擇指令,然后按一下常數,輸入數字1;1: UFRAME_NUM=1 2: UTOOL_NUM=1
再將機器人移動到一個安全位置,定義一個安全點,怎么定義呢?
走到相應的安全位置后,按下NEXT鍵切換功能鍵菜單,我們按下F1鍵點,選擇關節動作指令P1 點。然后發現機器人當前位置已經被記錄到P1點處。
然后機器人移動到一個合適的姿態,將機器人當前位置定義為P2點,也就是同樣的
添加一個關節動作指令P2 點,并將當前位置保存在P2點處。
添加一個直線動作指令P3 點
移動機器人至正方形的正上方,(在做直線運動的時候,盡量不要改變機器人的姿態,也就是,要在世界坐標系或者所選擇的用戶坐標系下進行示教。)然后將機器人當前的位置保存到P3點處;
添加一個直線動作指令P4 點
然后移動機器人至正方形軌跡點處第一點,將機器人當前位置記錄到P4點。
注:點擊
F1點后,這里面的一個標準動作只有四條指令,若需要用到其他指令怎么辦?
按下F1對應標準
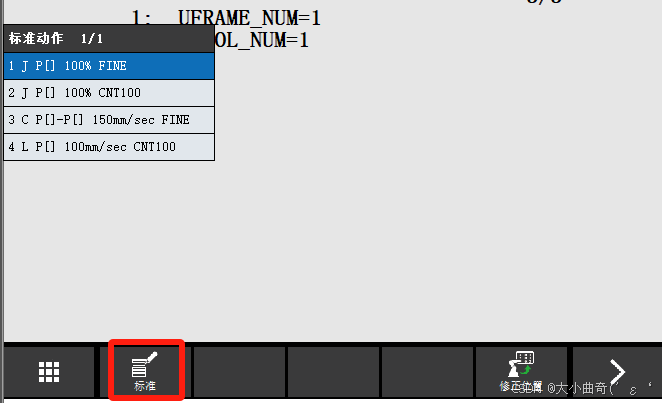
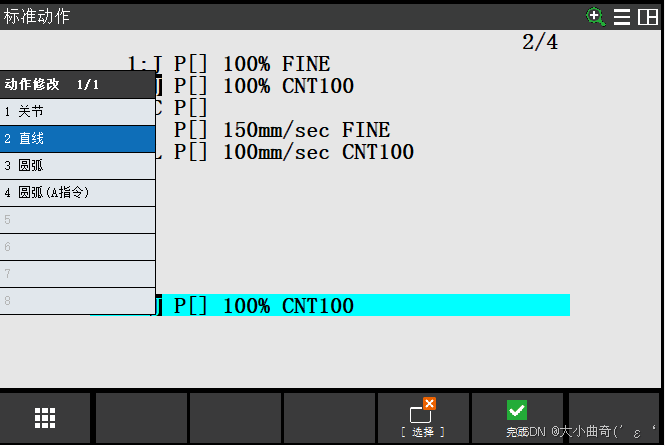
進入則可任意修改我們所需要的指令,這里面四個呢,主要是一個快捷方式,相當于我們一些常用的指令,若在編程的時候,發現圓弧指令使用較多,或者關節運動指令的50%的速度用的比較多。那就可以在里面修改;我們移動到下圖第二行J處,然后點擊
F4選擇,可選擇關節運動、直線、圓弧、C圓弧之類。
編輯完成之后,就可以點擊F5完成
添加一個直線動作指令P5 點
再移動機器人至正方形的第二點。然后將機器人當前的位置記錄到P5點處。
添加一個直線動作指令P6 點
再次移動機器人到正方形的第三個點。然后將機器人當前位置記錄到P6點
添加一個直線動作指令P7 點
再次移動機器人到正方形的第四個點。然后將機器人當前位置記錄到P7點
添加一個直線動作指令P8 點
為了構成一個完整的一個路徑,需要再定義一個點。然后將里面的位置變量修改為正方形的第一個點;
這樣呢,就構成了一個完整的正方形軌跡;
添加一個直線動作指令P2 點
再給它返回的時候,給它一個安全點。讓它移動到P2點處即可。
這樣呢,我們的整個直線運動實例的路徑規劃,就已完成。
完整程序如下
1: UFRAME_NUM=12: UTOOL_NUM=13: J P[1] 20% FINE4: J P[2] 20% FINE5: L P[3] 150mm/sec FINE6: L P[4] 150mm/sec FINE7: L P[5] 150mm/sec FINE8: L P[6] 150mm/sec FINE9: L P[7] 150mm/sec FINE 10: L P[4] 150mm/sec FINE 11: J P[2] 20% FINE
下面給大家演示一下,還有一個完整的一個動作流程,
在執行程序時,先選擇單步執行,因為剛示教完的程序不能保證百分百的正確率,因此要單步執行,對每一個示教的點位進行相應的驗證一下。
若發現整個程序運行下來沒有任何問題,
則切換至連續運行,連續運行一下,看一下有沒有問題;
2、圓弧運動實例
本節講解圓弧運動實例的操作步驟。
本實例使用的是基礎模塊,以模塊當中的圓形為例,演示機器人的一個圓弧動作;
在編程前呢,需要有一個準備工作。
準備工作完成后,進入編程界面,按下select鍵進入程序預覽畫面。
按下F2創建一個程序名稱。就以圓弧的這個漢語拼音為例,創建一個程序名稱;
創建完成之后,按下回車鍵,確認進入YUANHU程序的編輯界面;
首先選擇坐標系指令:
按下
next鍵切換功能鍵菜單,按下F1鍵對應指令選擇坐標系。這里面呢,我們選擇坐標系1,作為本次圓弧指令的一個坐標系。



詳解,解決使用 || 時因類型轉換帶來的問題)

使用Docker安裝Redis)







)





