Simscape 是由 MathWorks 公司開發的一款基于物理建模的仿真工具,它建立在 MATLAB/Simulink 平臺之上,專門用于建模和仿真多領域物理系統。
主要特點
- 多領域建模:Simscape 提供了豐富的物理元件庫,涵蓋了機械、電氣、液壓、氣動、熱力學等多個領域,用戶可以通過拖放這些元件并連接它們來構建復雜的多領域物理系統模型。
- 物理連接與信號連接:元件之間既可以通過物理連接來表示能量或物質的傳遞,也可以使用信號連接進行控制信號的傳輸。
- 自動代碼生成:可以將構建好的模型自動生成 C 代碼,以便部署到嵌入式系統或硬件平臺上進行實時測試和驗證。
- 與 Simulink 集成:Simscape 完全集成于 Simulink 環境中,使得用戶可以將物理模型與控制系統模型結合起來,進行綜合仿真。
- 參數化模型:Simscape 模型是參數化的,用戶可以輕松改變模型的物理參數,從而快速評估不同設計方案對系統行為的影響。
應用領域
- 汽車工程:用于設計和測試復雜的機械系統,如傳動系統、懸掛系統和液壓系統。
- 航空航天:用于飛行器的航電系統、液壓系統、飛行控制系統以及機身結構等的綜合建模與仿真。
- 機械設計:用于各種機械設備和工業機器人的設計驗證。
- 可再生能源:如風力發電和太陽能熱水系統的設計與分析。
- 熱管理系統:用于電動汽車的電池冷卻、電機和電力電子的熱管理,以及乘客艙的溫度調節。
Simscape 提供了一個直觀的建模環境,通過模擬物理系統的真實行為,幫助用戶在產品設計和測試階段做出更好的決策。
目前使用的matlab版本:2023a
在命令行中直接輸入:
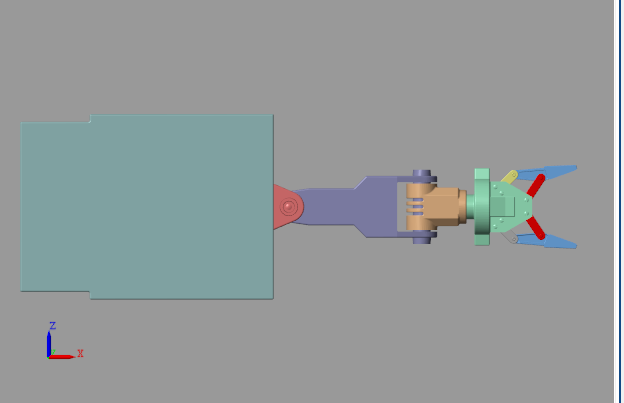
smimport(“sm_robot”);
你就會得到第一個機械手臂模型了,加油小伙伴。
查看部署流程圖)


















