導讀
車道拓撲推理對于高精建圖和自動駕駛應用至關重要,從早期的程序化建模方法發展到基于車載傳感器的方法,但是很少有工作對車道拓撲推理技術進行全面概述。為此,本文系統性地調研了車道拓撲推理技術,同時確定了未來研究的挑戰和機遇,旨在為研究者和從業者提供對這一快速發展領域的寶貴見解。
??【深藍AI】編譯
本文由paper作者——Miao Fan授權【深藍AI】編譯發布!
論文題目:A Concise Survey on Lane Topology Reasoning for HD Mapping
論文作者:Yi Yao, Miao Fan, Shengtong Xu, Haoyi Xiong, Xiangzeng Liu, Wenbo Hu, Wenbing Huang
論文地址:https://arxiv.org/abs/2504.01989
1、摘要
車道拓撲推理技術在高精(HD)建圖和自動駕駛應用中發揮著至關重要的作用。雖然近年來在該領域中取得了重大進展,但是很少有文獻綜合概述這些工作。本項調研系統性地回顧了車道拓撲推理方法的演變和現狀,將其分為三種主要范式:基于程序化建模的方法、基于航拍圖像的方法和基于車載傳感器的方法。本文分析了從早期基于規則的方法到現代基于學習的解決方案的進展,這些基于學習的解決方案利用了transformers、圖神經網絡(GNNs)和其它深度學習架構。本文研究了標準化的評估指標,包括道路級指標(APLS和TLTS評分)和車道級指標(DET和TOP評分),以及在OpenLane-V2等基準數據集上的性能比較。本文確定了關鍵的技術挑戰,包括數據集可用性和模型效率,并且總結了未來研究中有前景的方向。這篇綜述為研究者和從業者提供了對高精建圖應用中車道拓撲推理的理論框架、實際實現和新興趨勢的見解。
2、介紹
高精(HD)地圖是自動駕駛的基礎,它提供了道路網絡、車道配置和交通元素的詳細表示。在高精建圖的各方面中,車道拓撲推理(理解不同車道如何相互連接和關聯(見圖3))對于安全且高效的自主導航尤為重要。在過去的二十年里,該領域發生了重大的演變,從簡單的基于規則的方法發展到復雜的深度學習方法。
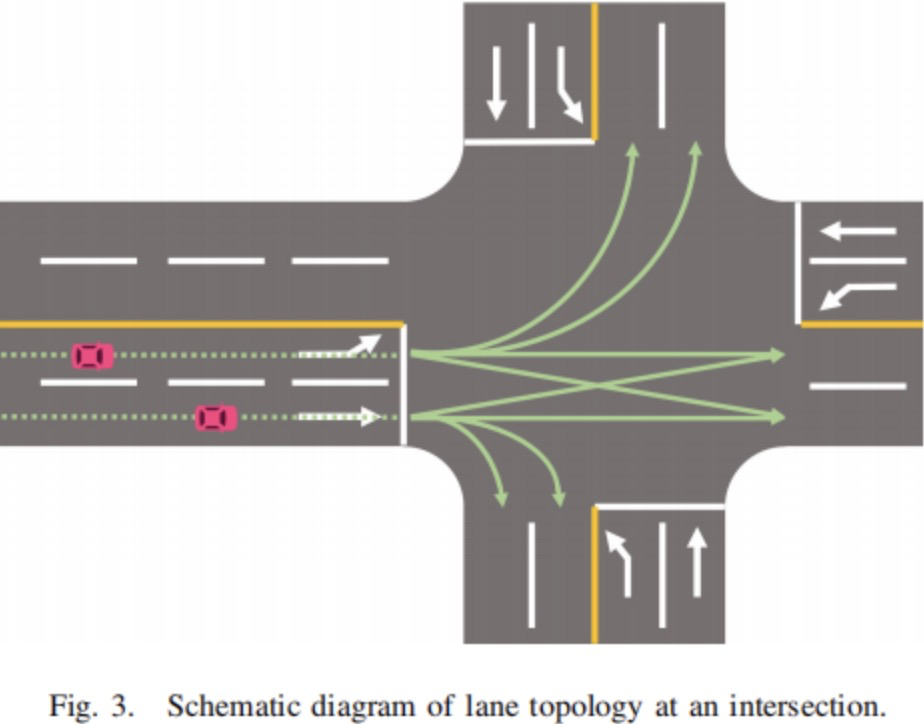
圖3|交叉路口處車道拓撲的示意圖
車道拓撲推理方法的發展大致可分為三種主要范式。早期的方法依賴于程序化建模技術,利用計算機圖形學和基于規則的系統來生成道路網絡。這些方法較為基礎,它們依賴于人工設計的規則并且缺乏靈活性,因此受到限制。基于航拍圖像方法的出現標志著一項重大轉變,它引入了計算機視覺技術從俯視圖中提取道路拓撲結構。然而,這些方法往往難以解決由建筑物和樹木造成的遮擋問題,它們只能提取粗略的道路級網絡。近年來,已經見證了基于車載傳感器方法的出現(見圖1),這代表著車道拓撲推理領域的最新進展。
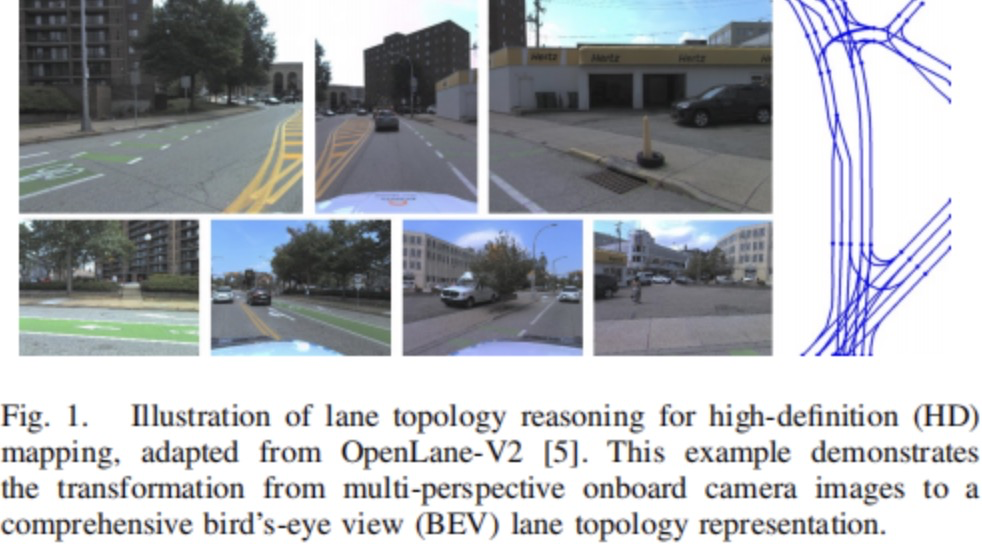
圖1|高精(HD)建圖的車道拓撲推理圖示
這些方法利用了深度學習架構,它們通常由幾個關鍵組件組成:用于特征提取的主干網絡(例如ResNet或者Swin Transformer)、用于鳥瞰圖轉換的透視變換、車道中心線檢測和拓撲推理模塊。現代方法通常結合多種輸入模態,包括相機、激光雷達和現有的SD地圖,以提高性能。基于transformer的架構和圖神經網絡(GNNs)的引入進一步推動了該領域的發展,實現了更復雜的拓撲推理能力。
現有的研究詳細介紹了高精地圖創建和車道拓撲構建,但是它們缺乏對最新研究的系統性介紹。本篇綜述全面回顧了車道拓撲推理方法,分析了它們的演變、能力和局限性。本文研究了該領域中使用的不同評估指標,包括道路級指標和車道級指標,并且比較了各種方法在標準基準上的性能。此外,本文還討論了當前的挑戰,并且確定了未來研究中有前景的方向,旨在為研究者和從業者提供對這一快速發展領域的寶貴見解。
3、方法回顧
本節回顧了2024年之前發表的具有代表性的車道拓撲推理方法。如圖2所示,這些方法根據其發展范式分為三類。
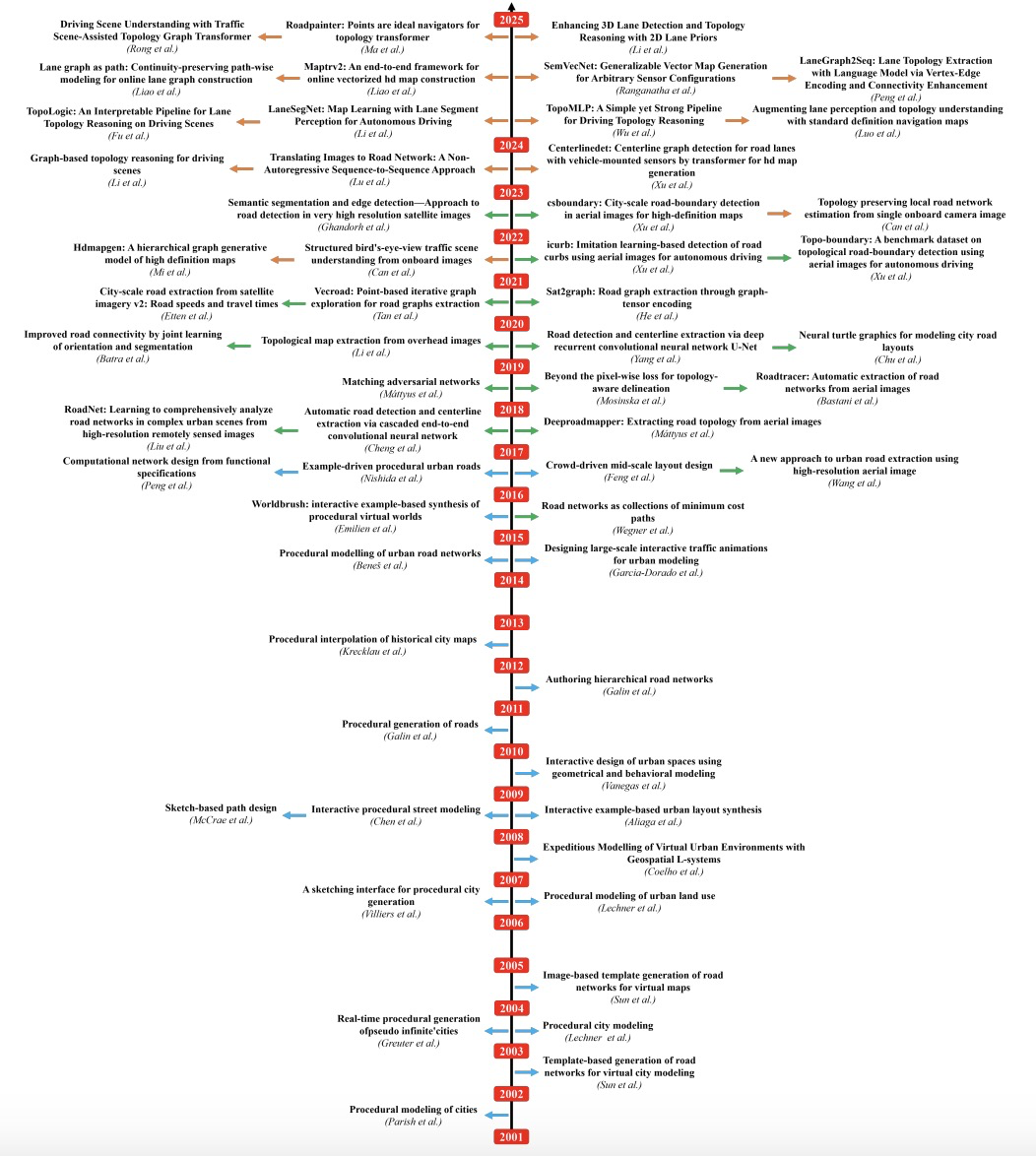 圖2|2001年至2024年車道拓撲推理研究的演變,展示了該領域的方法進展和技術轉型。時間線跟蹤了三種不同的方法:基于程序化建模的方法(藍色箭頭)、基于航拍圖像的方法(綠色箭頭)和基于車載傳感器的方法(橙色箭頭)
圖2|2001年至2024年車道拓撲推理研究的演變,展示了該領域的方法進展和技術轉型。時間線跟蹤了三種不同的方法:基于程序化建模的方法(藍色箭頭)、基于航拍圖像的方法(綠色箭頭)和基于車載傳感器的方法(橙色箭頭)
?
程序化建模在2017年之前就已經盛行,基于航拍圖像的方法在2017年至2022年期間獲得了主流地位。自2023年以來,基于車載傳感器的解決方案變得越來越普遍。
3.1 基于程序化建模的方法
車道拓撲推理的早期探索主要采用計算機建模技術來模擬城市道路網絡,其主要優點是數據放大能力強。這些方法的工作流程如圖4所示。
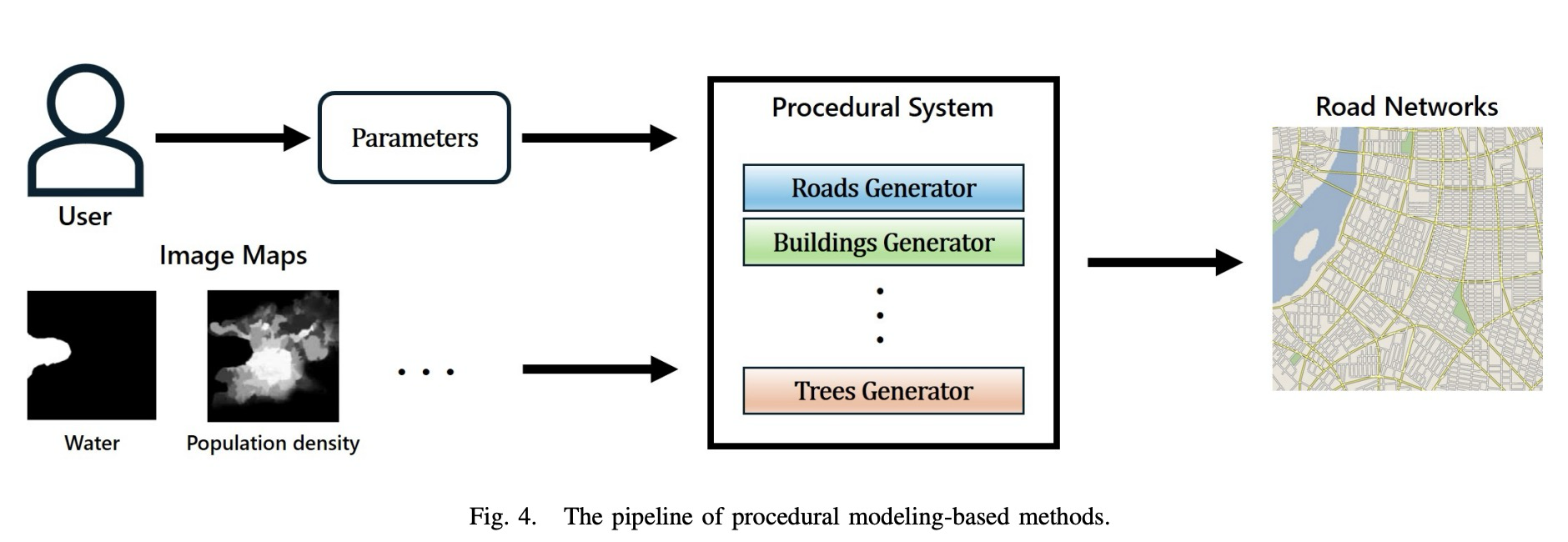
圖4|基于程序化建模方法的流程
在輸入城市的2D圖像地圖(例如地理地圖和統計地圖)后,這些方法生成了包含建筑物、道路網絡和其它城市特征的虛擬城市地圖。交互式參數調整使得用戶能夠根據特定要求來優化結果。
Parish等人提出了將L-system應用于生成城市道路網絡的開創性工作,這一概念在后續研究中得到了進一步擴展。Chen等人引入了張量場表示來建模道路幾何形狀。隨后的改進引入了額外的約束和功能。地形感知方法確保了地理一致性,而智能仿真技術增強了交通建模的真實性。此外,基于草圖的方法實現了直觀的用戶交互,示例驅動的方法利用預先存在的數據來加快道路網絡生成。
3.2 基于航拍圖像的方法
盡管基于程序化建模的方法是該領域的基礎,但是這些方法的可控性仍然有限,并且嚴重依賴于人工設計的規則。此外,評估這些規則和參數對最終輸出的影響本身具有挑戰性,這需要大量的迭代實驗來獲得令人滿意的結果。因此,這些方法缺乏靈活性。相比之下,深度學習的興起通過從航拍圖像中直接提取道路拓撲結構,從而徹底改變了高精建圖技術。這些方法利用了神經網絡,這最大限度地減少了人工干預,并且簡化了建圖過程。這些方法的一般工作流程如圖5所示。
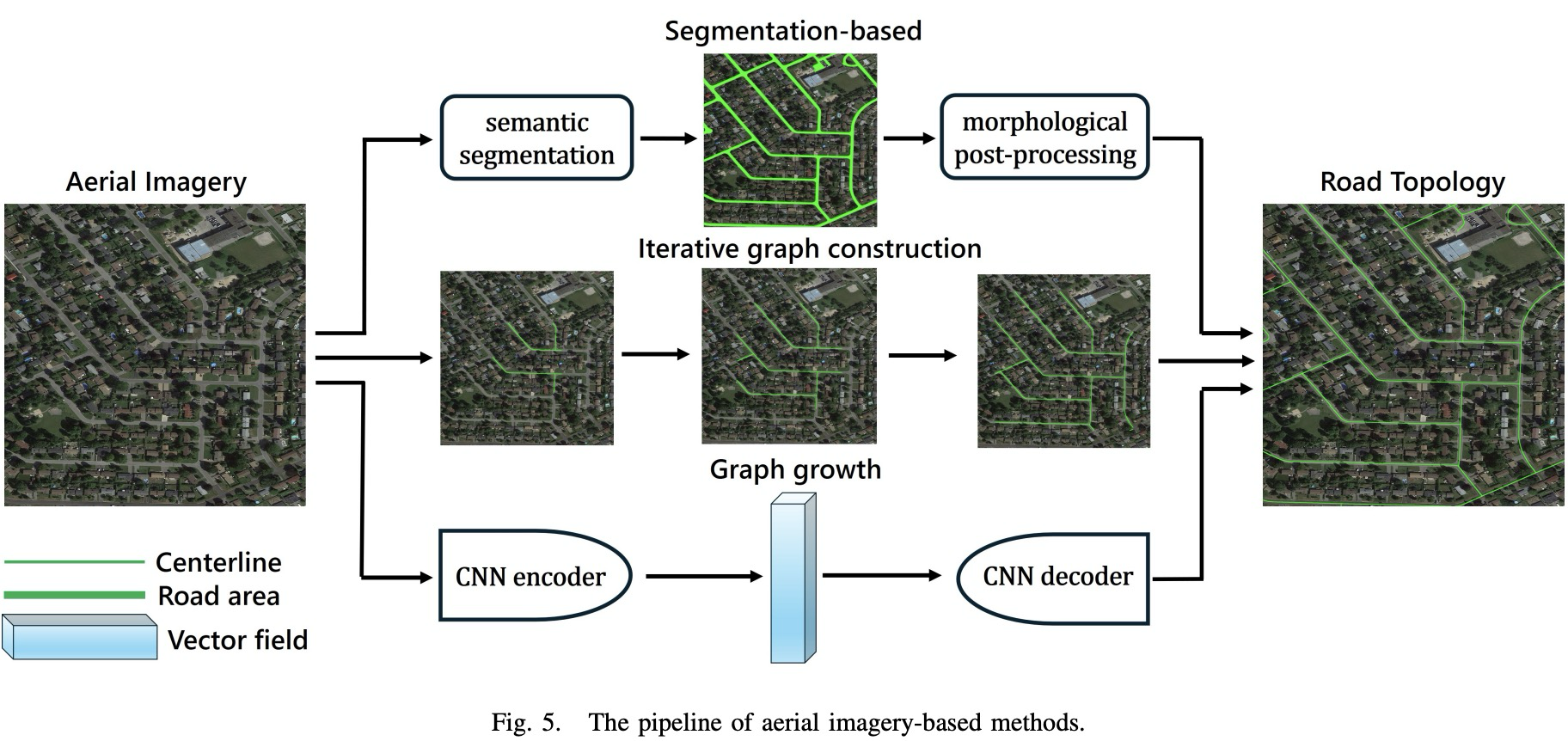
圖5|基于航拍圖像方法的流程
一些方法利用語義分割網絡來識別航拍圖像中的道路區域,然后進行形態學后處理以提取道路拓撲。替代方法包括迭代圖構造和圖生長方法。迭代圖構造方法通過從道路網絡中識別幾個頂點,并且根據預定義的決策函數迭代地添加新的頂點和邊來逐步擴展圖。相比之下,圖生成方法更為直接。這些方法采用矢量場編碼策略,它們首先將航拍圖像編碼為潛在表示。神經網絡隨后用于預測圖頂點,然后解碼過程預測鄰接矩陣并且重建道路網絡。
3.3?基于車載傳感器的方法
盡管基于航拍圖像的方法為該領域引入了新的方法,但是它們僅限于提取粗略的道路級網絡。此外,建筑物和樹木造成的遮擋往往會使道路在航拍圖像中不完整,從而影響結果的準確性。因此,這些方法不適合自動構建高精地圖或者為自動駕駛汽車規劃行為。為了解決這些局限性,基于車載傳感器的方法逐漸興起,它們利用從車載傳感器捕獲的單模態或者多模態數據來構建自車周圍的詳細車道拓撲。這些方法代表了高精建圖的重大轉變,它們提供了更高的準確性和適用性。圖6展示了基于車載傳感器方法的典型流程,包括主干網絡、透視變換、車道解碼器和拓撲解碼器。
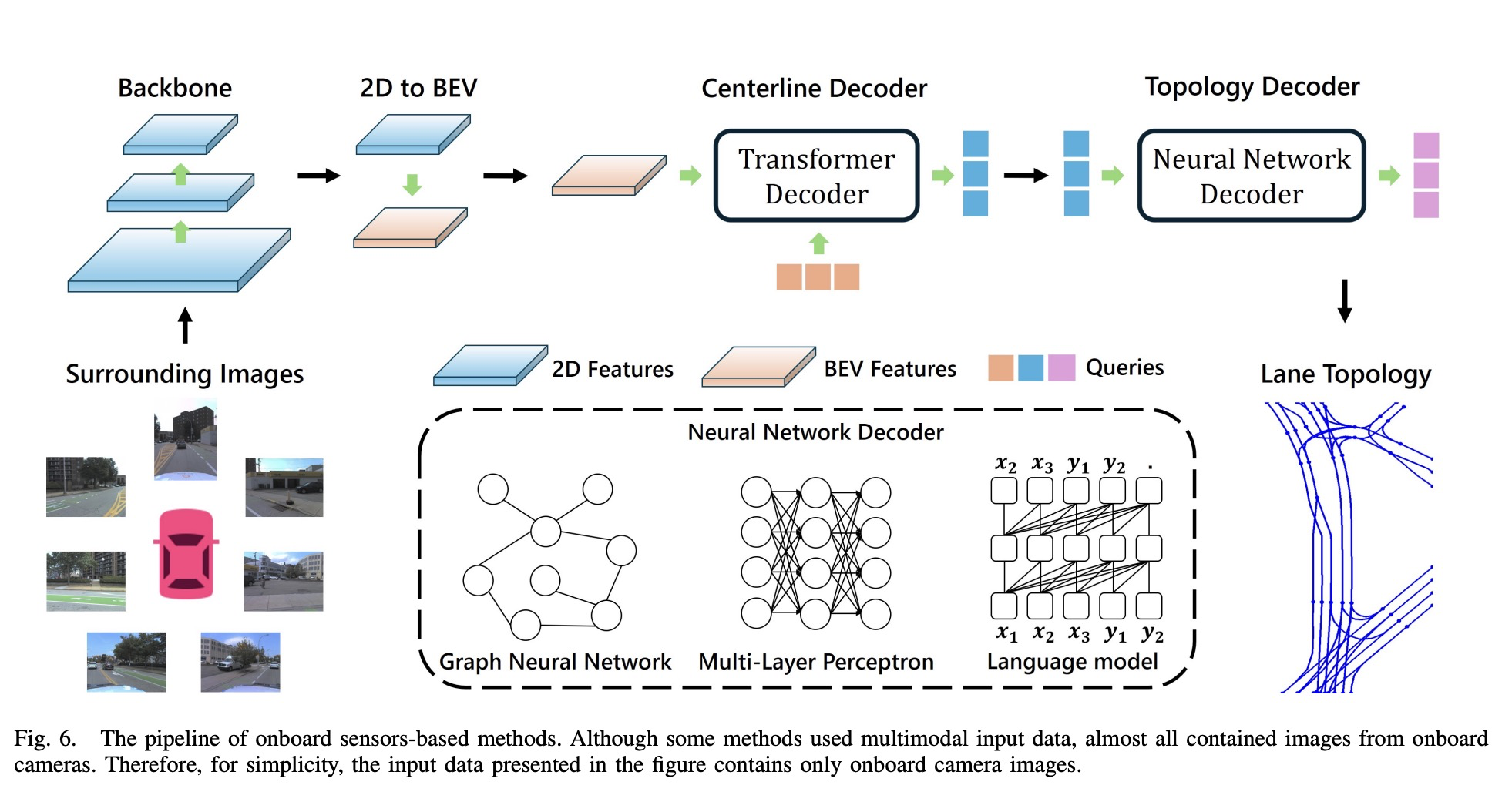
圖6|基于車載傳感器方法的流程
主干部分通常由特征提取網絡組成,例如ResNet和Swin Transformer。然后,透視變換將這些特征轉換為鳥瞰圖(BEV)格式。在獲得BEV特征后,通常使用基于transformer的架構來設計車道中心線解碼器,以根據信息要求輸出車道中心線特征。在這部分中,通常使用一組學習到的查詢向量來映射不同的中心線實例。拓撲解碼器的功能是在這些車道中心線實例之間建立連接,通常使用GNNs、MLPs和語言模型。除了車載相機圖像外,一些方法還使用補充數據源來增強輸入特征,包括SD地圖、激光雷達點云和交通元素(例如交通信號燈和交通標志牌),從而提高了性能。
Can等人提出了首批工作之一,他們使用來自前視相機的單幀圖像作為輸入并且采用類似于DETR的基于transformer的架構來預測中心線實例。該方法使用額外的MLPs來輸出中心線實例的連接關系。同樣,另一些方法也使用一組MLPs來預測拓撲關系。在先前工作的基礎上,Can等人引入了最小環的概念,并且準確估計了交叉路口區域的車道連接關系。LaneGAP通過采用Path2Graph算法來恢復拓撲關系,從而進一步改進了拓撲估計。HDMapGen僅使用基于圖的模型來自回歸地生成車道拓撲。一些解決方案首先檢測車道中心線,并且將每條車道中心線映射到頂點,然后使用基于圖的模型來更新車道拓撲。此外,另一些方法對車道中心線特征進行序列化,并且使用語言模型來建立拓撲關系。
3.4 其它方法
盡管本項調研著重于上述三種方法類型,但是也存在其它重要的方法。例如,Jia等人根據現有高精地圖中的車道線和道路邊界來生成車道拓撲;He等人和Stanojevic等人從GPS軌跡中提取車道拓撲。
4、數據集和基準
本節列出了上述方法中常用的數據集。此外,本文還研究了該領域中使用的不同評估指標,并且比較了各種方法在基準數據集上的性能。
4.1 數據集
相關數據集可以分為2D數據集和3D數據集。表格1總結了這些數據集,它們通過提供針對特定研究需求而設計的多樣化且高質量的數據,在推進道路拓撲提取和車道拓撲推理方面發揮關鍵作用。
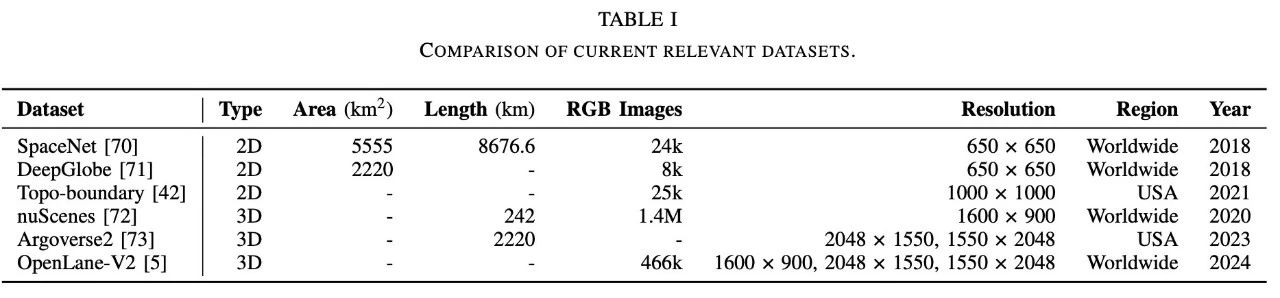
表格1|當前相關數據集的比較
1)2D數據集:為了從航拍圖像中提取道路拓撲結構,已經使用了幾個2D數據集,包括SpaceNet、DeepGlobe和Topo-boundary。SpaceNet是一個包含建筑和道路網絡標注的大規模數據集,它廣泛應用于城市拓撲提取任務。DeepGlobe專注于具有不同土地覆蓋類型的鄉村地區,該數據集提供了高密度的道路網絡標注,使其適用于需要在非城市環境中進行建圖的任務。Topo-boundary是專門為離線拓撲道路邊界檢測而設計的。
2)3D數據集:nuScenes、Argoverse2和OpenLane-V2是基于車載傳感器的方法中使用的重要數據集。nuScenes和Argoverse2都由來自高分辨率車載傳感器(包括相機和激光雷達)的數據組成。OpenLane-V2是專門為車道拓撲推理任務而設計的獨特3D數據集,它分為兩個子集:subset_A和subset_B,分別來自Argoverse2和nuScenes。這些子集確保了全面覆蓋與車道拓撲推理相關的場景。
4.2?評估指標
三個像素級指標(精度、召回率和F1評分)和兩個拓撲級指標(APLS評分和TLTS評分)是基于航拍圖像的方法中常用的道路級指標。此外,車道級指標(例如感知指標(DETl評分)和推理指標(TOPll評分))在基于車載傳感器的方法中廣泛應用于車道中心線之間的拓撲結構。基于程序化建模的方法缺乏一致的評估指標,因此這里不討論它們。
4.3?比較結果
表格2展示了三種基于航拍圖像的方法(基于分割、迭代圖構建和圖生長)在Topo-boundary數據集上的定量結果。
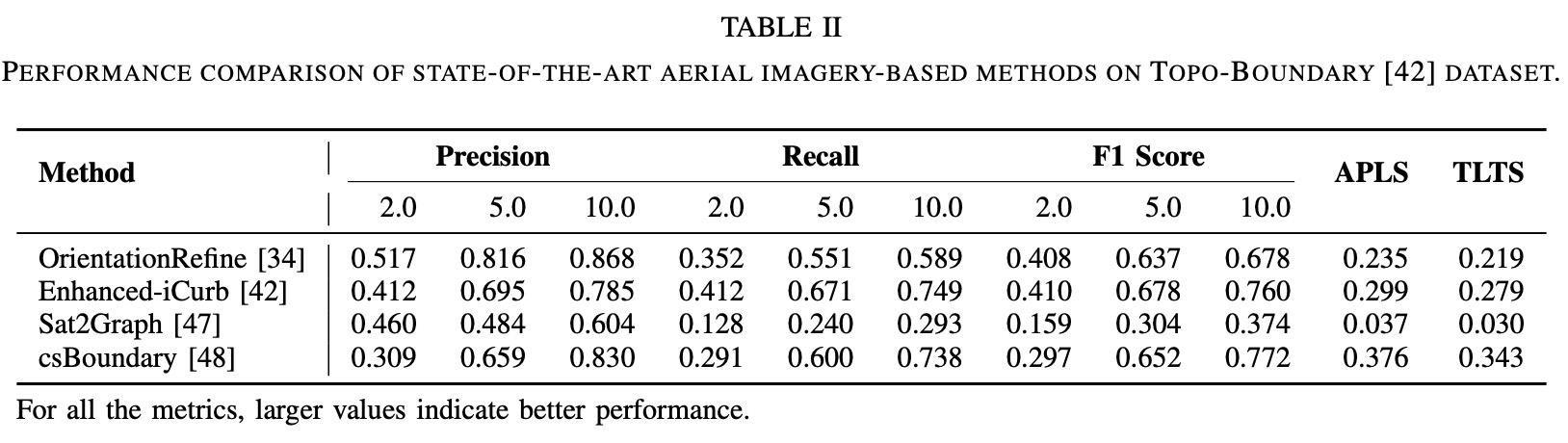
表格2|最先進的基于航拍圖像的方法在Topo-boundary數據集上的性能比較
表格3展示了基于車載傳感器的方法在OpenLane-V2數據集上的定量結果。
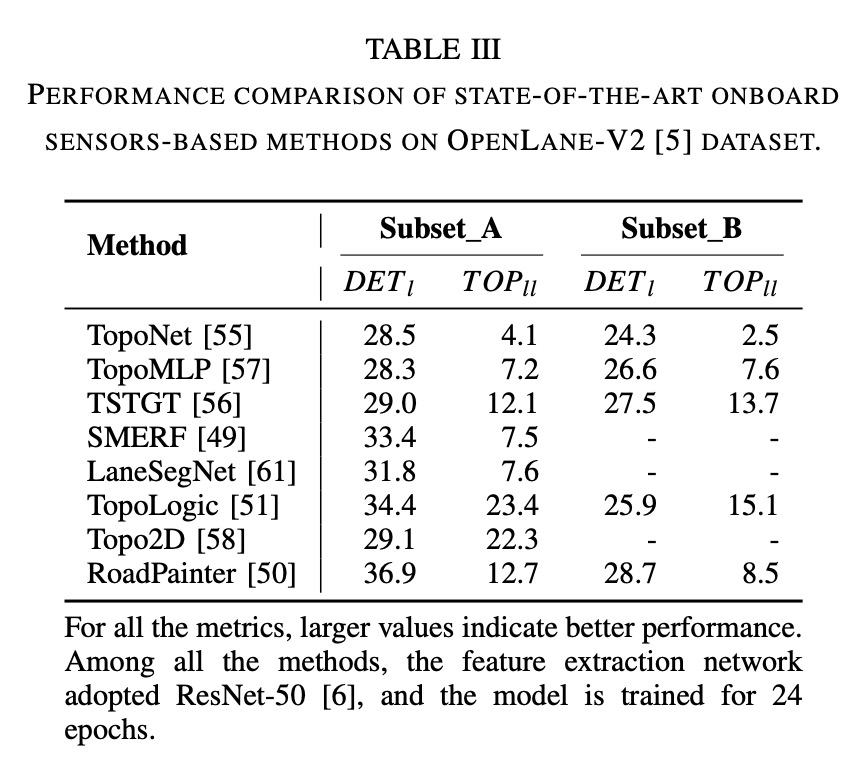
表格3|最先進的基于車載傳感器的方法在OpenLane-V2數據集上的性能比較
5、挑戰
盡管在高精建圖的車道拓撲推理方面取得了重大進展,但是仍然存在若干項挑戰有待解決:(1)專用于車道拓撲推理的數據集構建受到高成本的阻礙,這限制了大規模、高質量數據集的可用性。因此,需要更多的研究工作來開發針對車道拓撲推理的可獲取且魯棒的數據集。(2)盡管基于車載傳感器的方法代表了最新技術,但是它們通常涉及具有大型參數規模的模型。這限制了它們在自動駕駛汽車或者邊緣設備上的直接部署,這些設備具有嚴格的計算和能量限制。因此,開發能夠實時構建高精地圖的輕量級模型是至關重要的。(3)用于車道拓撲推理的路側和車載相機數據融合仍然沒有得到充分探索。與車載相機不同,路側傳感器(例如道路視頻監控)為高精建圖提供了一個互補的視角,緩解了周圍車輛的遮擋問題,并且提高了準確性。然而,關于這一領域的研究文獻有限,因此需要進一步研究。
6、總結
車道拓撲推理技術已經成為高精建圖和自動駕駛應用中的關鍵組成部分,從早期的程序化建模階段快速發展成現代的基于車載傳感器的方法。本篇綜述對這一進展進行了全面分析,突出了取得的重大進展,同時確定了未來研究中的挑戰和機遇。現代技術在捕獲復雜的車道拓撲方面展現出卓越的性能。各種數據源(包括相機圖像、激光雷達點云和現有的SD地圖)的集成進一步提高了這些系統的魯棒性和準確性。然而,一些關鍵挑戰依然存在。大規模、高質量數據集的可用性受限繼續制約著模型的開發和驗證。此外,當前架構的計算需求對資源受限環境中的實時應用提出了挑戰。對于該領域中的未來研究,一個有前景的方向是通過采用路側基礎設施輔助的車輛感知技術來構建車道拓撲。














)




正則化等最優化方法介紹)