1 激光雷達應用廣泛,汽車有望成最大催化
? ? ? ? 激光雷達(LiDAR)是一種主動遙感技術,通過測定傳感器發出的激光在傳感器與目標物體之間的傳播距離,來分析目標地物表面的反射能量大小、反射波譜的幅度、頻率和相位等信息,進而實現對目標物體的精確定位、識別以及一些特性的檢測,主要可以用于自動駕駛、智慧城市等領域。
????????激光雷達的工作原理是利用激光發射器發射激光束,然后通過接收器接收從目標物體反射回來的激光信號,從而測量出目標物體的距離、方向、高度等信息。激光雷達可以用于自動駕駛、機器人、測繪等領域,具有高精度、高分辨率、高可靠性等優點。
圖表1:激光雷達工作原理
????????激光雷達按照測距方法可以分為飛行時間(Time of Flight,ToF)測距法、基于相干探測的FMCW 測距法、以及三角測距法等,其中ToF 與FMCW 能夠實現室外陽光下較遠的測程(100-250m),是車載激光雷達的優選方案。ToF 是目前市場車載中長距激光雷達的主流方案,未來隨著 FMCW 激光雷達整機和上游產業鏈的成熟,ToF 和 FMCW 激光雷達將在市場上并存。
圖表2:激光雷達按測距方法分類

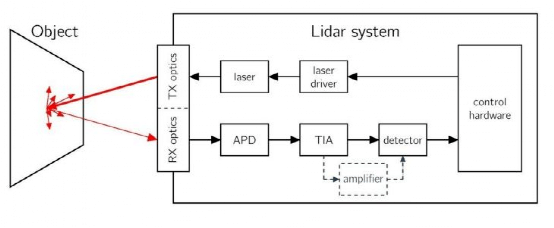
圖表3:TOF 激光雷達結構
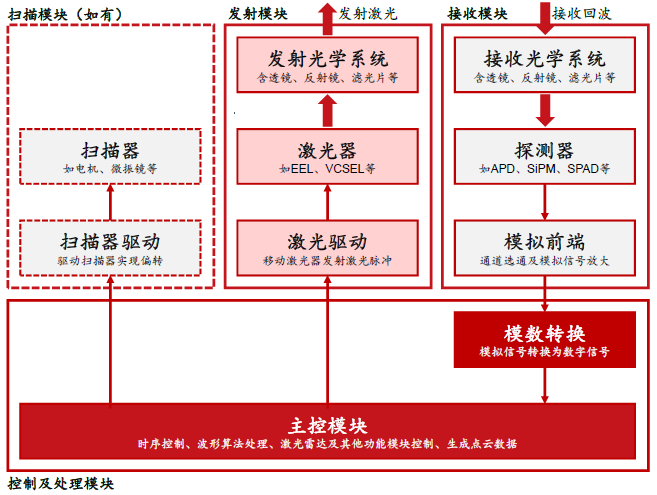
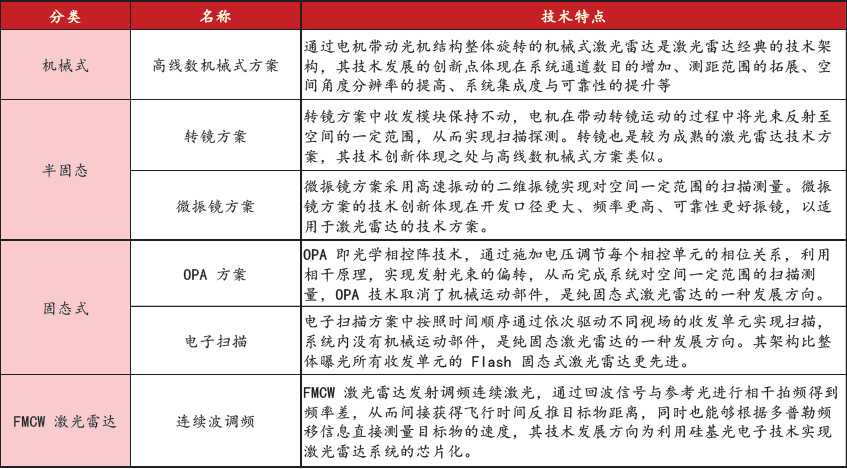
????????根據技術架構的差異,激光雷達主要分為機械式激光雷達、半固態式激光雷達以及固態式激光雷達。
圖表4:激光雷達按技術架構分類
????????激光雷達自誕生以來,緊跟底層器件的前沿發展,不斷引入新的技術架構,從激光器發明之初的單點激光雷達到后來的單線掃描激光雷達,以及在無人駕駛技術中獲得廣泛認可的多線掃描激光雷達,再到技術方案不斷創新的固態式激光雷達、FMCW 激光雷達,技術路徑持續創新。
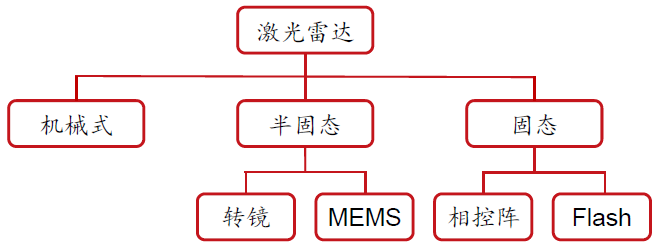
圖表5:激光雷達分類
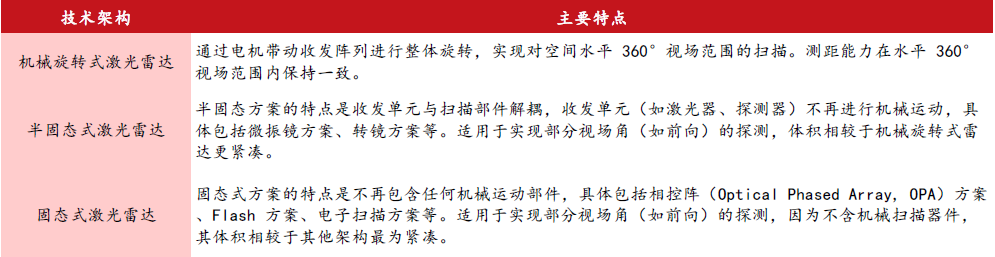
圖表6:激光雷達方案技術特點
1.1 機械式激光雷達
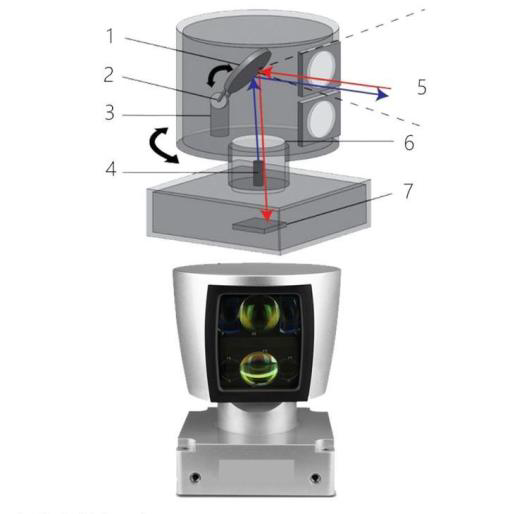
? ? ? ? 機械旋轉式激光雷達通過電機帶動收發陣列進行整體旋轉,實現對空間水平360°視場范圍的掃描。機械旋轉式激光雷達的優點是掃描速度快、精度高,適用于遠距離探測和高速運動目標的跟蹤。但是其結構相對復雜,維護成本高,且需要精確的對準和校準,造成其短期可能無法在乘用車上大批量的使用。
圖表7:機械式激光雷達工作原理
1.2 固態激光雷達
????????固態激光雷達使用固態激光器,可以輸出高質量而穩定的激光束,能夠實時捕捉和處理光點數據,有效提高了雷達精度;同時固態激光雷達沒有機械運動部件,相比于旋轉激光雷達,其壽命更長且故障率更低。
????????然而,固態激光雷達也有一些缺點:探測距離相對較短:由于其工作原理的限制,固態激光雷達的探測距離一般較短,可能無法滿足遠距離探測的需求。固態激光雷達的視場角一般較小,可能無法覆蓋較大的角度范圍。
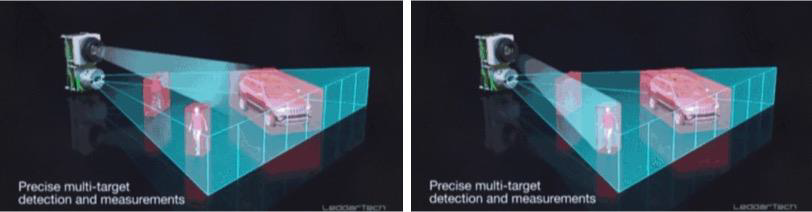
????????A. Flash 激光雷達:主要通過短時間直接發射出一大片覆蓋探測區域的激光,再以高度靈敏的接收器完成對環境周圍圖像的繪制。其優點在于快速記錄整個場景,體積小,缺點主要在于激光功率受限、探測距離較近。
圖表8:Flash 激光雷達工作原理
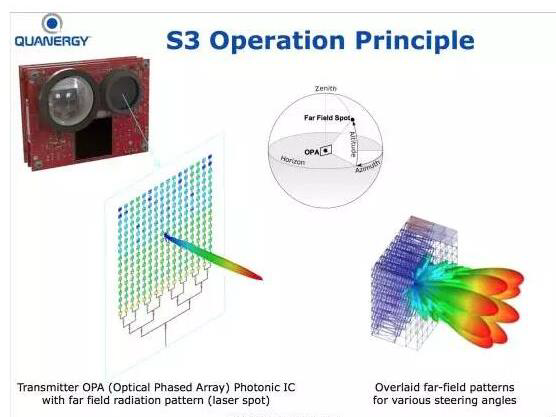
????????B.光學相控陣激光雷達:采用光學相控陣天線代替傳統的機械掃描系統,可以實現高速度、高精度的三維成像。其利用多個小型激光器并列排列,通過控制每個激光器的發射時間和相位,實現激光束在空間上的合成,形成所需的掃描圖案。相比傳統的機械掃描激光雷達,光學相控陣激光雷達具有更高的掃描速度和更長的掃描距離。同時具有更高的精度和靈活性。
????????然而,光學相控陣激光雷達制造工藝較為復雜,成本較高,同時其性能也受到光源質量、光學元件質量和控制系統精度等因素的影響。
圖表9:Quanergy 光學相控陣激光雷達工作原理
1.3 半固態激光雷達
? ? ? ? 半固態激光雷達具有一些顯著的優點,例如半固態激光雷達利用多個光源組成陣列,實現對不同方向的快速掃描,因此具有較高的掃描速度;通過控制光源的陣列,可以實現對特定方向的光束進行精確合成,從而獲得高精度的測量結果。半固態激光雷達由于沒有機械運動部件,因此體積較小,可以較好的融入到車的外觀中去,但是由于半固態激光雷達掃描的是非結構化數據,因此需要采用更為復雜的算法進行處理,增加了數據處理的難度和計算量。
????????A. MEMS 振鏡激光雷達:采用MEMS 振鏡作為激光光束掃描元件,反射鏡以一定諧波頻率振蕩,由旋轉的微振鏡來反射激光器的光線,從而實現掃描,具有體積小、宏觀結構簡單、可靠性高、功耗低等優勢,是目前激光雷達實現落地應用的較合適的技術路徑。
????????B. 轉鏡方案:采用轉鏡作為激光光束掃描元件,工作原理是將激光束照射到轉鏡上,通過轉鏡的旋轉來掃描目標物體,可以實現不同角度的掃描。具有高精度、高分辨率、可靠性高等優點。但是由于轉鏡方案的制造工藝較為復雜,因此成本相對較高。
1.4 FMCW 激光雷達
????????相比傳統的基于飛行時間(ToF)的脈沖激光雷達,FMCW 激光雷達基于相干探測方法,通過發出連續的激光束,并控制激光束的頻率隨著時間變化,形成一定的調頻曲線,可以響應目標運動引起的多普勒頻移,提供目標的瞬時視向速度,FMCW激光雷達具有更高的精度和分辨率,同時也具有更強的抗干擾能力。
圖表10:FMCW 激光雷達工作原理
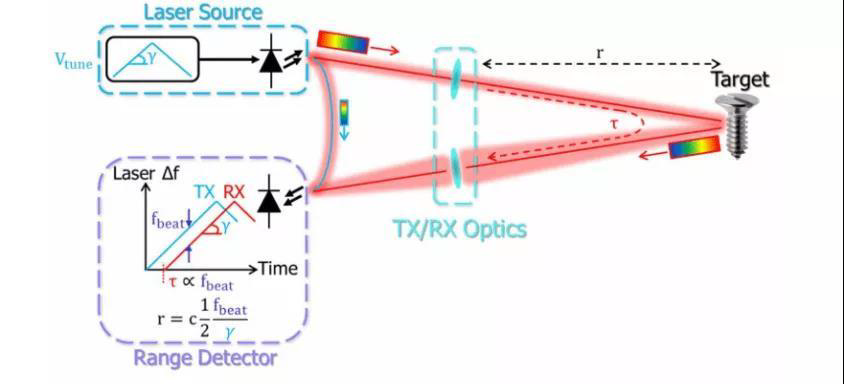
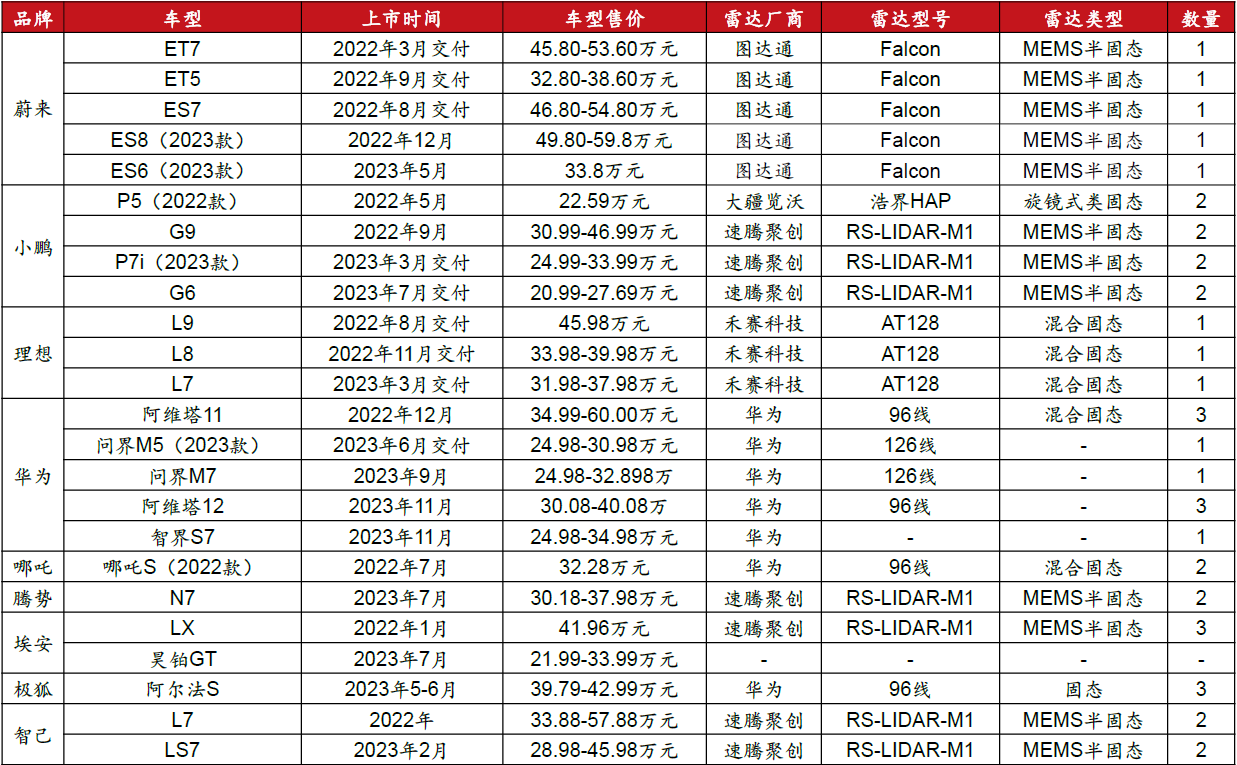
????????FMCW 激光雷達的接收和掃描中也需要用到硅光芯片,由于硅光芯片既能導電又能導光,因此它既具有光電探測器的功能,又具有調制解調的功能,從而使得整個系統集成化、小型化。由中國信息通信研究院技術與標準研究所編撰的《車載激光雷達技術與應用研究報告(2023 年)》統計,截止到2023 年第三季度,已有36家中國車企宣布使用激光雷達,預計國內將有高達106 款搭載激光雷達的車型上市,占全球同期預計發布搭載激光雷達新車型總數量近90%,中國車企在激光雷達領域將持續引領著行業的創新。
圖表11:重點車型激光雷達搭載情況
2 海外巨頭跟蹤:洗牌加速,新技術持續落地
????????行業內主要的激光雷達公司包括美國的 Velodyne、Luminar、Aeva、Ouster,以色列的 Innoviz,德國的 Ibeo,以及國內的速騰聚創、禾賽科技、圖達通、華為等。在行業發展早期國外公司為技術主導,但近幾年國內激光雷達公司投入大量研發,逐步完成了技術的追趕甚至在一定范圍內實現超越。
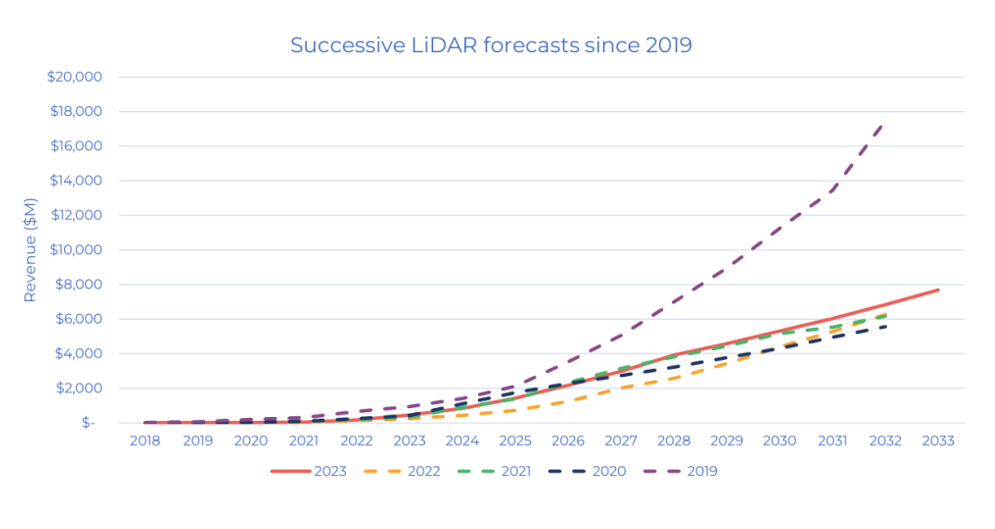
????????根據Yole Intelligence 發布的《2023 年全球車載激光雷達市場與技術報告》,調高了對乘用車和輕型商用車激光雷達市場的中長期預測:到2030 年,乘用車和輕型商用車激光雷達市場將到達53 億美元,比去年預測的高出10 億美元。
圖表12:激光雷達全球市場空間預測
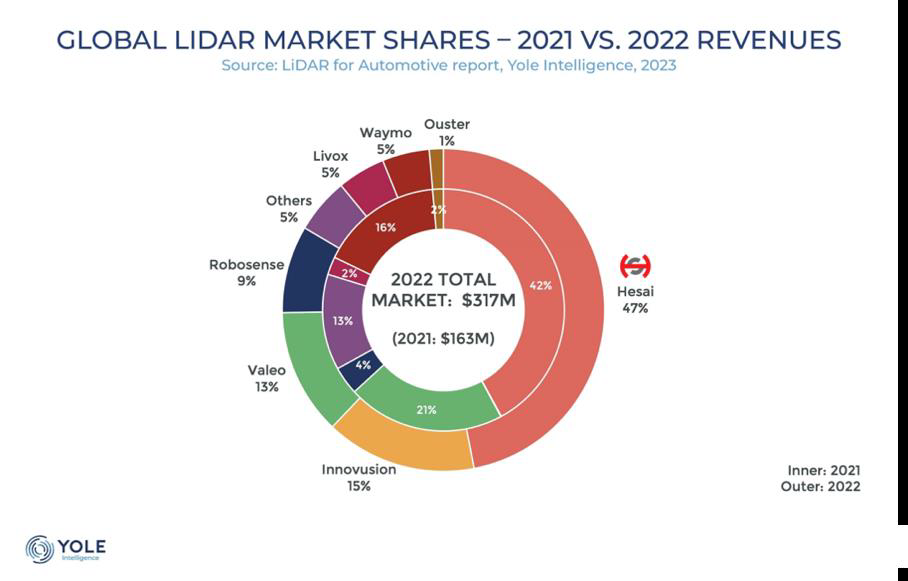
????????從全球激光雷達市場格局來看,2022 年,禾賽以近50%的市場份額連續兩年穩居全球車載激光雷達總營收榜首,并且其市場份額從2021 年的42%進一步擴大至47%。圖達通則依靠蔚來汽車的持續出貨,以15%的市場份額奪得第二名,法雷奧、速騰聚創分別以13%、9%的市場份額位列第三、第四。
圖表13:激光雷達全球競爭格局
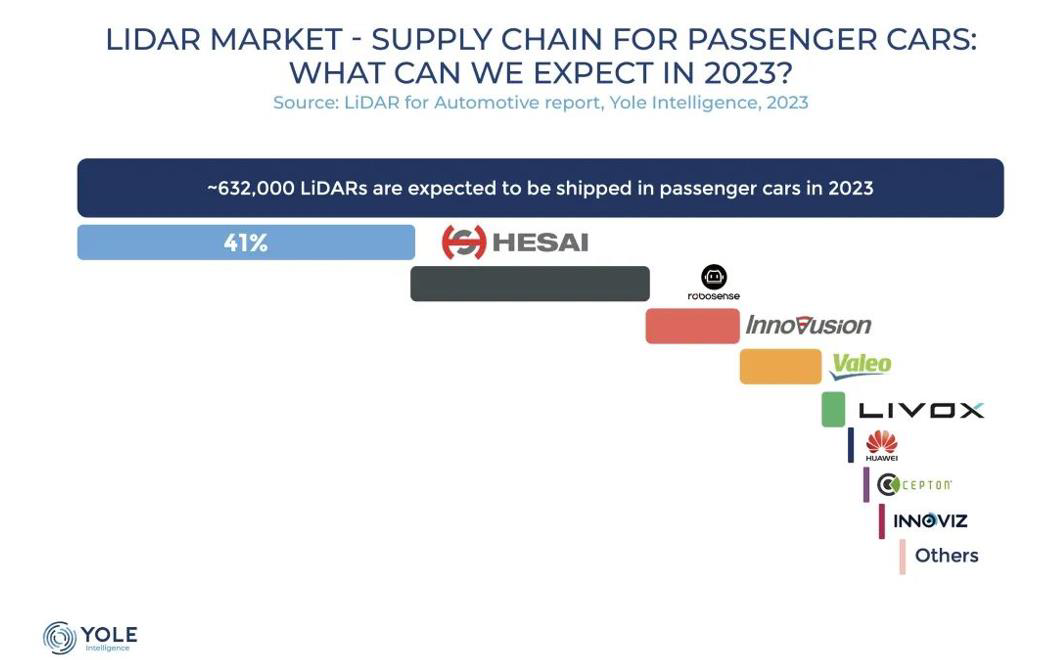
????????隨著中國智能駕駛行業快速崛起,ADAS 功能量產規模進一步擴大,國內頭部車企對激光雷達的需求猛增,Yole 預測2023 年全球車載激光雷達市占率前五的廠商中,前三名都會是中國企業,分別是禾賽、速騰聚創和圖達通。剩下約20%的份額則由法雷奧、大疆覽沃、華為、Cepton、Innoviz 等多家公司瓜分
圖表14:激光雷達2023 年市場份額預測
2.1 Innoviz:與寶馬深入合作,獲大眾40 億美元訂單
? ? ? ? 以色列激光雷達傳感器研發商Innoviz 成立于2016 年,由來自以色列國防軍情報部隊精英技術部門的四位聯合創始人創建。該公司專注于研發固態激光雷達(LiDAR)傳感器,致力于為自動駕駛和高級駕駛輔助系統(ADAS)市場提供創新的解決方案。
????????Innoviz 的激光雷達傳感器在市場上具有較高的競爭力,已被多家知名汽車制造商和自動駕駛技術公司選用。2017 年宣布與全球第三大代工廠 Jabil(捷普)合作,2018 年宣布與 Magna(麥格納)合作寶馬項目,并于為寶馬2021 年推出的L3 量產車提供激光雷達。2022 年8 月以色列激光雷達公司Innoviz 宣布,將向大眾汽車集團旗下的CARIAD 提供激光雷達硬件和配套軟件,交易總價達40 億美元,預計2025 年開始交付。
????????Innoviz 旗下共有三大產品線:1)InnovizOne:最遠探測距離250 米,適用于L3-L5 級汽車;2)InnovizTwo:成本較InnovizOne 降低了70%以上,同時性能顯著提升,主要針對L2+級市場,L3-L4 亦適用,將應用于大眾等品牌;3)Innoviz360:性能、成本和耐用性都得到顯著提升,最遠探測距離300m,主要針對L4/5 級自動駕駛,計劃2024 年量產。
2.2 Luminar:加速全球化工廠布局
? ? ? ? Luminar 是一家美國激光雷達公司,由Austin Russell 在2012 年創立,專注于MEMS 混合固態激光雷達領域。該公司在1550nm 波長持續深耕,主要產品為Iris和Hydra。其中,Hydra 是上一代激光雷達產品,主要用于測試和開發;公司最新的車規級產品Iris 于2022 年量產,與沃爾沃達成供應協議,用于 2022 年上市的自動駕駛系統。Luminar 已經與多家汽車制造商合作,包括奔馳、沃爾沃、奧迪、豐田研究院、英特爾的 Mobileye、空客以及上汽集團 和 AV 運營商小馬智行等重要客戶。
圖表17:美國激光雷達公司Luminar

????????Luminar 今年三月在投資者日活動推出了新版本的 Iris 傳感器,公司稱其具有300 米(984 英尺)的檢測范圍,Luminar 正在與梅賽德斯合作,將Iris Plus 激光雷達集成到其車輛中,預計將于2025 年開始量產。同時Luminar 計劃在亞洲開設一家制造工廠以支持生產。墨西哥工廠也于今年第二季度開始上線,Luminar還與合同制造商 Fabrinet 一起擴建泰國的另一家工廠以生產光學組件。
2.3 Velodyne&Ouster:合并經營,競爭格局快速洗牌
????????美國Velodyne 是一家位于加州硅谷的技術公司,以激光雷達傳感器技術為核心,提供自動駕駛解決方案。公司由David Hall 于1983 年創立,早期以音響業務起家,后來逐漸將業務拓展至激光雷達領域。2021 年全年,Velodyne 出貨量達到了15000 多個,其中有2400 多個是固態傳感器,大部分為機械激光雷達。根據2022 年Velodyne 官網的合并公告,Ouster 與Velodyne 完成“對等合并”,新公司繼續使用Ouster 的名字,合并后的公司將擁有850 多家現有客戶、豐富的專利組合。但是后續隨著圖達通、法雷奧、禾賽科技、速騰、華為等廠商的快速崛起,曾占據全球激光雷達市場80%以上份額的Velodyne 市占率縮水。
2.4 Aeva:FMCW 技術領先者,產品有望后年投產
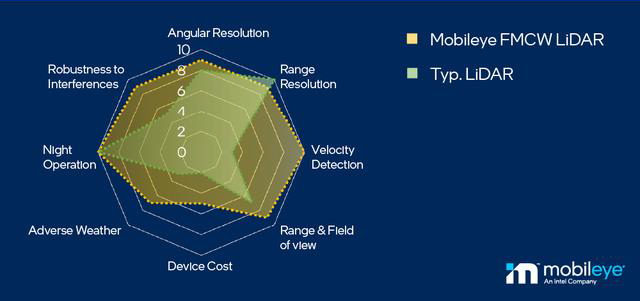
????????Aeva 的激光雷達傳感器采用先進的調頻連續波(FMCW)技術,可以實現高精度的距離和速度測量,以及高分辨率的點云成像。這使得傳感器能夠準確檢測和識別車輛周圍的所有物體,包括行人、車輛和障礙物,最遠可以探測到500 米外的物體。2021 年1 月,Avea 與日本電裝宣布達成合作協議,雙方將共同推進FMCW(調頻連續波)激光雷達的量產,目標是滿足大眾市場的需求。Aeva 聯合創始人兼首席執行官表示,公司已拿到全球前十車企的定點,量產車型預計在2025 年投產。
圖表24:Mobileye FMCW 激光雷達性能表現








班課表)






與queue(隊列)的使用與簡單實現)



