
接線圖如上圖所示。?
我們初始化一下PB0和PB1兩個GPIO口外設中斷,當然,這里只初始化一個外部中斷也能完成功能的對于編碼器而言,下圖所示為正轉的波形。如果把一相的下降沿用作觸發中斷,在中斷時刻讀取另一相的電平,正轉時B就是高電平,反轉是B就是低電平,這樣就能區別旋轉方向了。只不過這樣在操作上有一些小瑕疵,比如你正轉的時候,由于A相先出現下降沿,所以你剛開始動,就進中斷了,而反轉時是A相后出現下降沿,所以就是你轉到位了,才進行中斷。
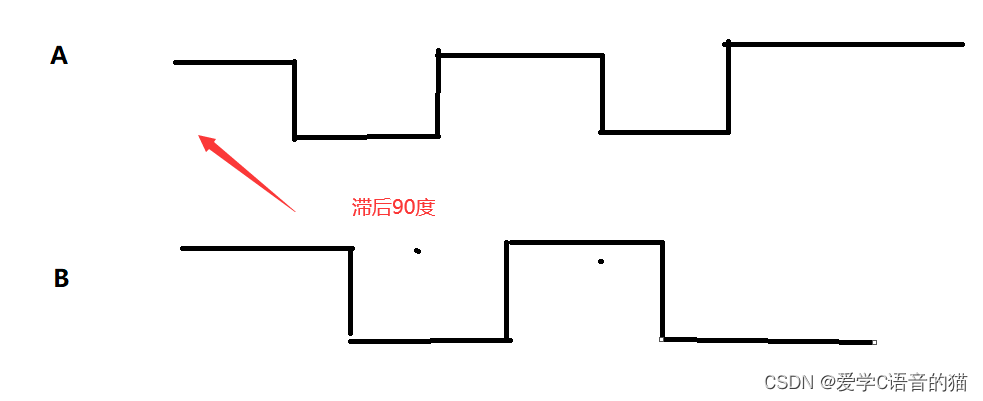
所以打算A,B都觸發中斷,只有在B相下降沿和A相低電平時,才判斷為正轉,在A相下降沿和B相為低電平時,才判斷為反轉。這樣保證正轉和反轉都轉到位了,才執行數字加減的操作,同時可以演示兩個初始化代碼。
下面是代碼:
Encoder.c
#include "stm32f10x.h" // Device headerint16_t Encoder_Count;void Encoder_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);EXTI_InitTypeDef EXTI_InitStructure;EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_Init(&EXTI_InitStructure);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;NVIC_Init(&NVIC_InitStructure);
}int16_t Encoder_Get(void)
{int16_t Temp;Temp = Encoder_Count;Encoder_Count = 0;return Temp;
}void EXTI0_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line0) == SET){/*如果出現數據亂跳的現象,可再次判斷引腳電平,以避免抖動*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){Encoder_Count --;}}EXTI_ClearITPendingBit(EXTI_Line0);}
}void EXTI1_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line1) == SET){/*如果出現數據亂跳的現象,可再次判斷引腳電平,以避免抖動*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0){Encoder_Count ++;}}EXTI_ClearITPendingBit(EXTI_Line1);}
}
Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_Hvoid Encoder_Init(void);
int16_t Encoder_Get(void);#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"int16_t Num;int main(void)
{OLED_Init();Encoder_Init();OLED_ShowString(1, 1, "Num:");while (1){Num += Encoder_Get();OLED_ShowSignedNum(1, 5, Num, 5);}
}
OLED模塊就不寫了,前面博文有。?
?



登入界面-進階版)


)












