文章目錄
- 一.論文信息
- 二.論文內容
- 1.摘要
- 2.引言
- 3.作者貢獻
- 4.主要圖表
- 5.結論
一.論文信息
論文題目: You Can’t See Me: Physical Removal Attacks on LiDAR-based Autonomous Vehicles Driving Frameworks(你看不見我:對基于激光雷達的自動駕駛汽車駕駛框架的物理移除攻擊)
論文來源: 2023-Usenix Security
論文團隊: 密歇根大學 & 佛羅里達大學 & 日本電氣通信大學

二.論文內容
1.摘要
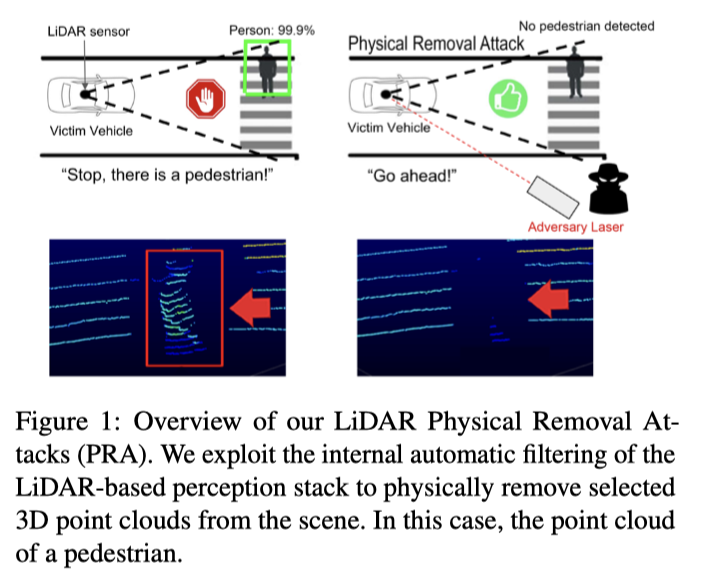
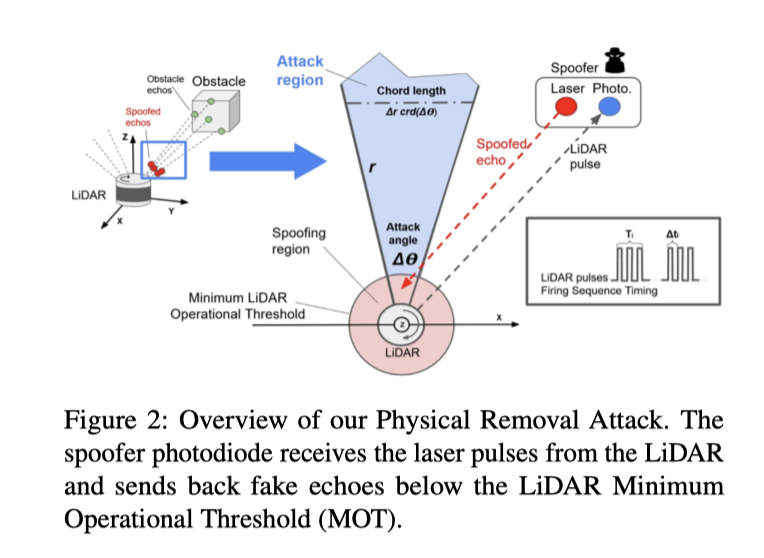
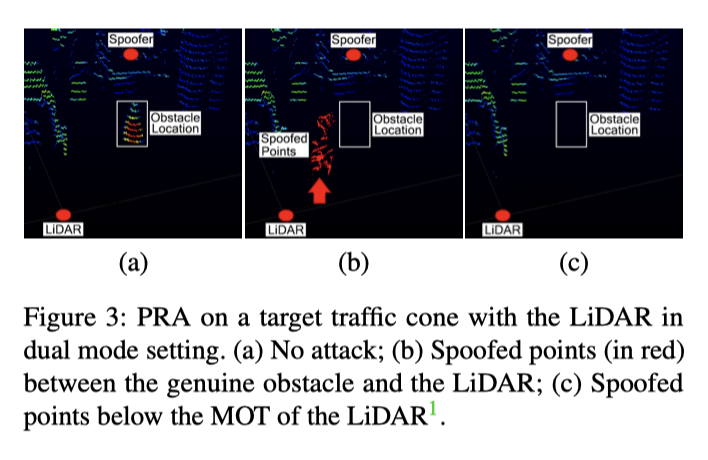
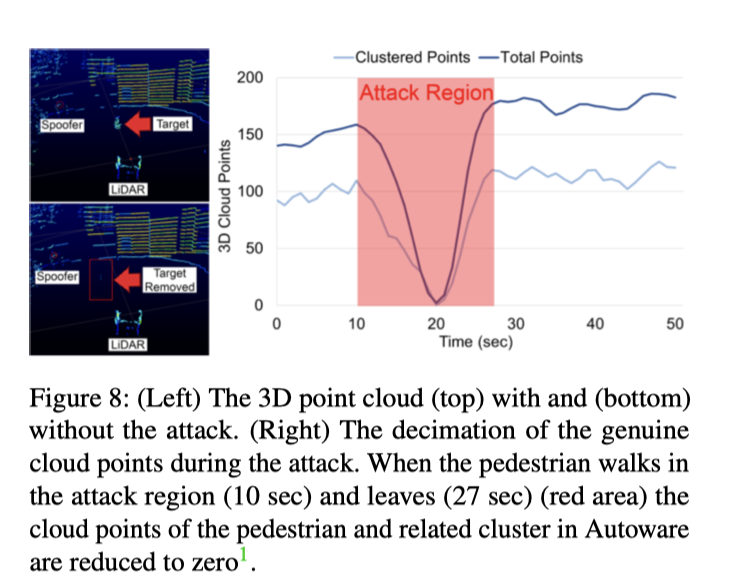
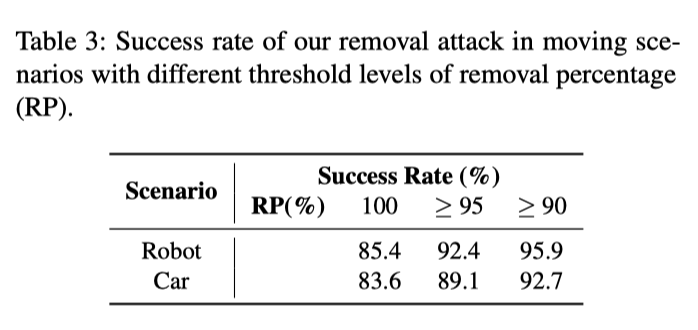
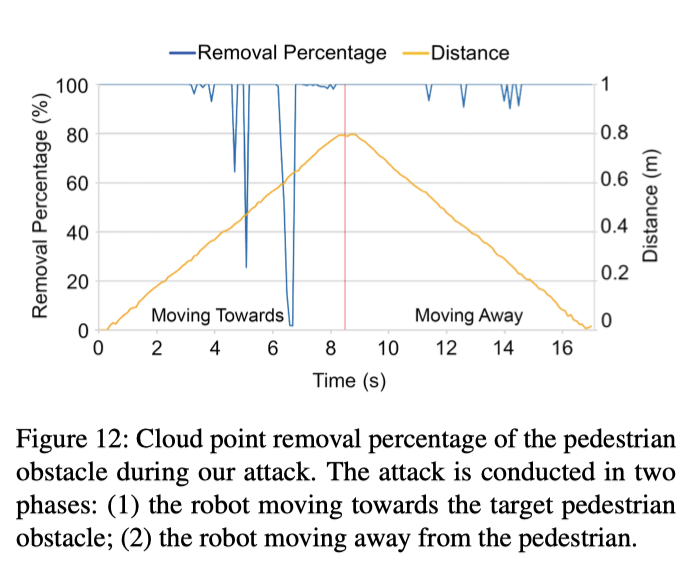
自動駕駛汽車(AVs)越來越多地使用基于激光雷達的物體檢測系統來感知道路上的其他車輛和行人。目前,針對基于激光雷達的自動駕駛架構的攻擊主要集中在降低自動駕駛物體檢測模型的置信度,以誘導障礙物誤檢測,而我們的研究發現了如何利用基于激光的欺騙技術,在傳感器層面選擇性地去除真實障礙物的激光雷達點云數據,然后將其用作自動駕駛感知的輸入。這些關鍵的激光雷達信息的消融會導致自動駕駛障礙探測器無法識別和定位障礙物,從而導致自動駕駛汽車做出危險的自動駕駛決策。在本文中,我們提出了一種人眼不可見的方法,通過利用激光雷達傳感器數據與自動駕駛框架集成的固有自動轉換和濾波過程,隱藏物體并欺騙自動駕駛汽車的障礙物探測器。我們稱這種攻擊為物理移除攻擊(PRA),我們證明了它們對三種流行的自動駕駛障礙探測器(Apollo, Autoware, PointPillars)的有效性,我們實現了45?攻擊能力。我們使用工業級模擬器LGSVL評估了攻擊對三種融合模型(Frustum-ConvNet、AVOD和集成語義級融合)的影響,以及對駕駛決策的影響。在我們的移動車輛場景中,我們實現了92.7%的成功率去除90%的目標障礙物云點。最后,我們演示了針對欺騙和對象隱藏攻擊的兩種流行防御的攻擊成功,并討論了兩種增強的防御策略來減輕我們的攻擊。
2.引言
3.作者貢獻
- 我們識別和建模基于激光欺騙攻擊的激光雷達傳感器,通過利用內部云點變換和濾波去除真正的點云。
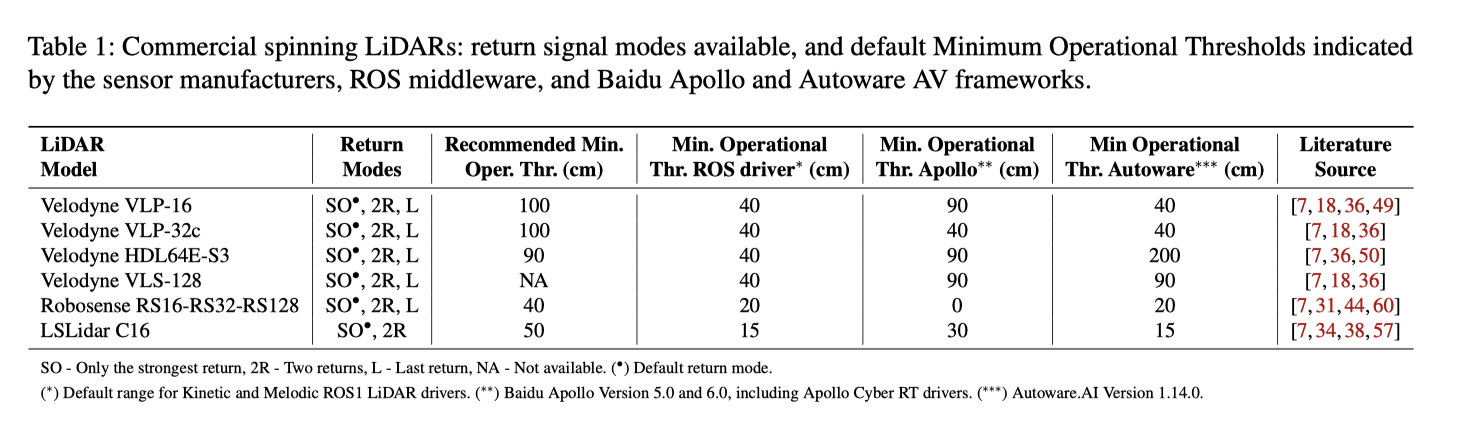
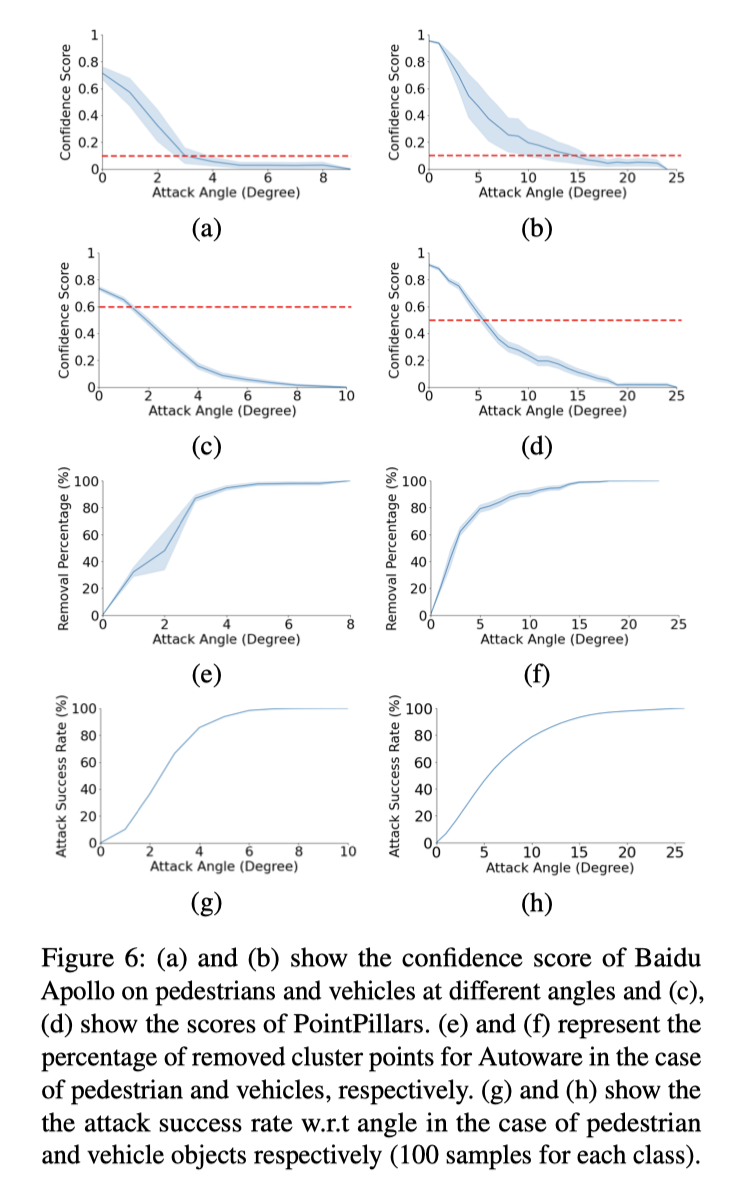
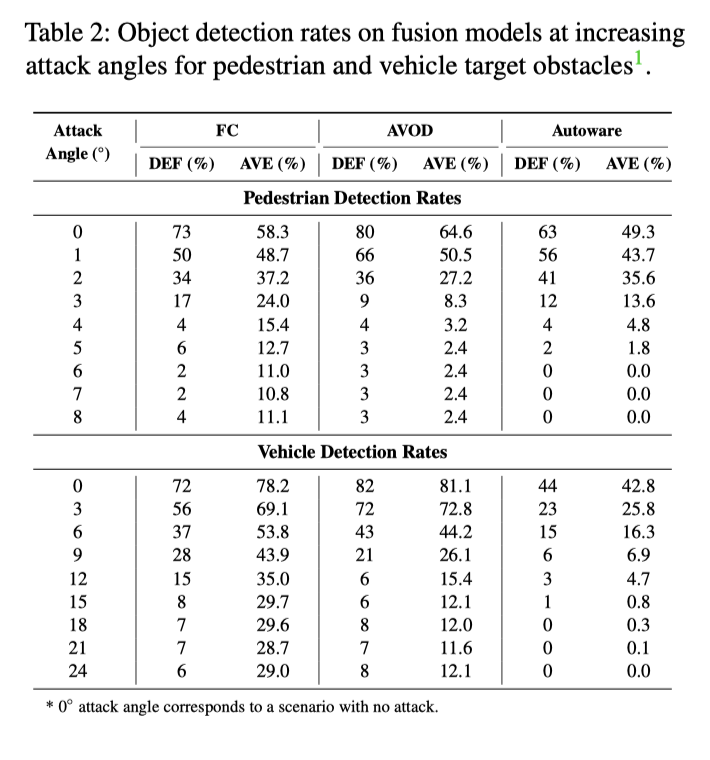
- 我們在三種流行的商業和學術AD感知模型(百度Apollo [7], PointPillars[19]和Autoware[44])上對PRA的攻擊者能力,挑戰和限制進行了建模。然后,我們評估了攻擊對三種最先進的融合模型(Frustum-ConvNet [52], AVOD[17]和Autoware Integrated-Semantic Level fusion[44])的影響。
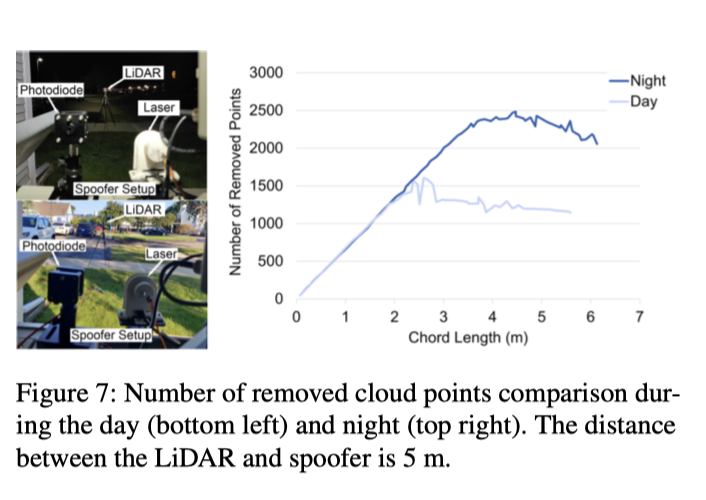
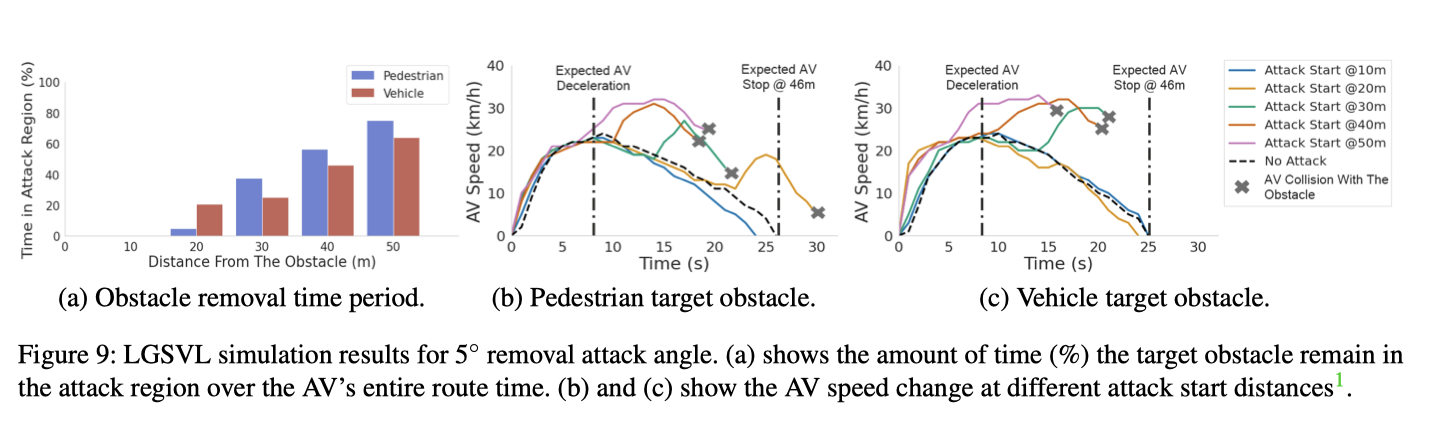
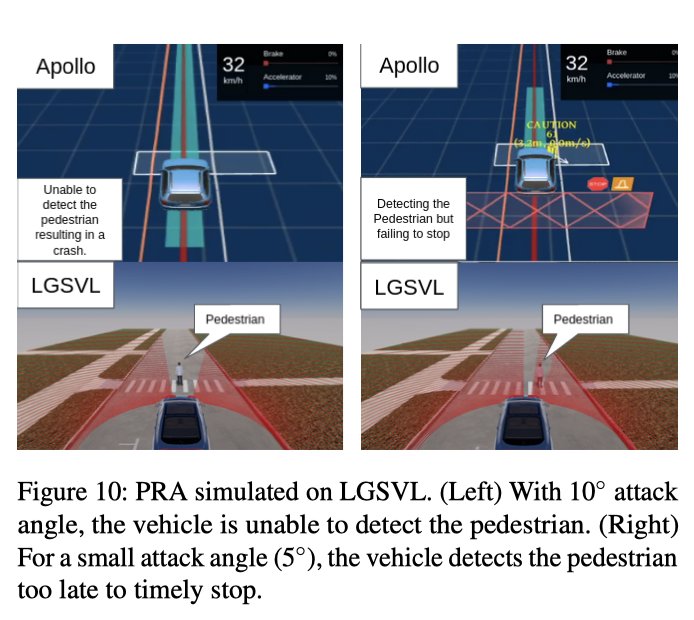
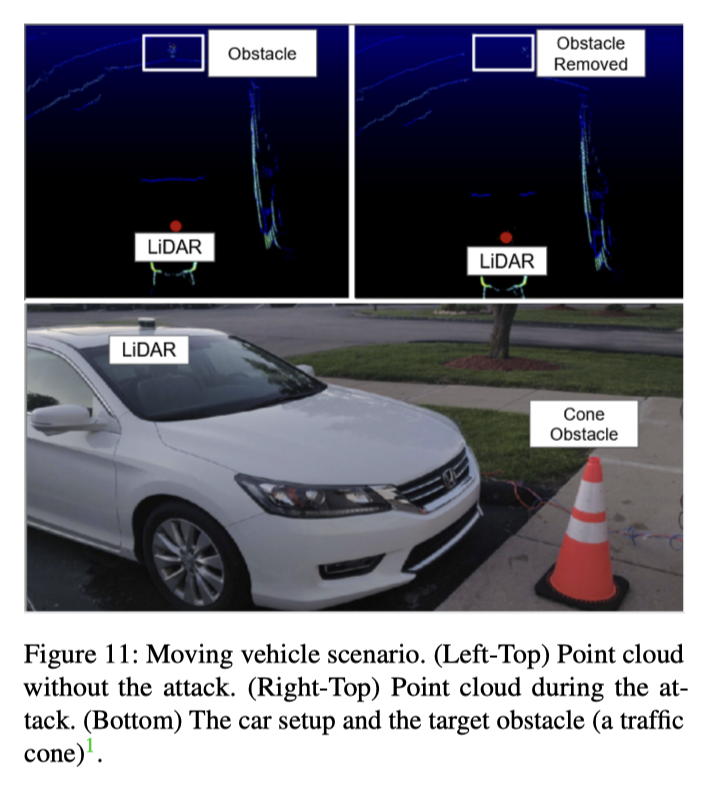
- 我們通過在生產級AD模擬器LGSVL上展示自動駕駛汽車的后果來驗證我們的發現[33],并對移動機器人和車輛進行現實世界的攻擊。
- 我們驗證了針對云點欺騙的兩種現有防御方法(CARLO[42]和隱藏攻擊防御[16])的攻擊有效性。最后,我們提出了兩種增強策略來減輕威脅。
4.主要圖表

5.結論
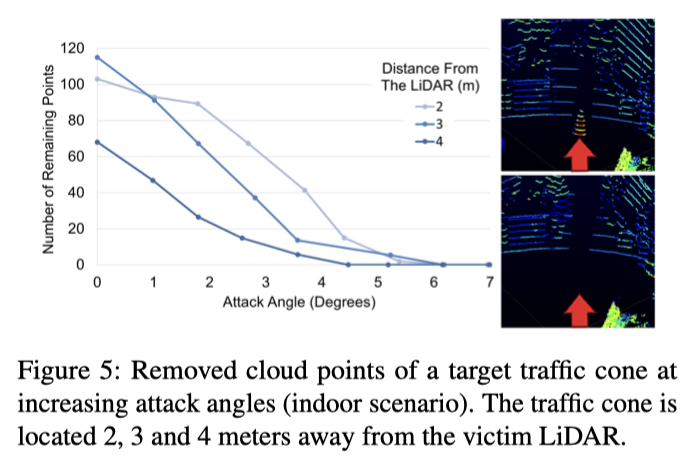
我們發現了一種新的物理移除攻擊,可以將激光雷達點云從真正的障礙物中移除。本研究探討了攻擊者在傳感器級別使用點云消融的能力,導致AD感知模塊無法識別障礙物及其位置,達到攻擊者的45?能力。然后,我們評估了PRA對三種AV感知和融合模型的影響。我們還實現了92.7%的成功率去除移動車輛上90%的目標障礙云點。最后,我們提出了兩種有效的防御策略來幫助減輕威脅。





)

:)




:從制作一個對戰小游戲開始(Cocos Creator 《擊敗老大》)(第二段))






