開發能夠協助穿衣的輔助機器人,可以極大地改善老年人和殘疾人的生活。然而,大多數機器人穿衣策略只考慮使用單個機器人,這大大限制了穿衣輔助的性能。事實上,專業護理人員是通過雙臂來完成這項任務的。受其啟發,我們提出了一種雙臂合作的機器人穿衣輔助方案。在該方案中,交互式機器人與人類手拉手,從而在穿衣過程中支持/引導人類,而穿衣機器人則執行穿衣任務。我們分析了一個影響穿衣的關鍵特征:肘部角度,并利用該特征為交互式機器人提出了一個最佳策略。為了更好地學習穿衣策略,我們定義了基于手臂姿勢的穿衣坐標,然后使用模仿學習得到機器人穿衣策略。我們通過大量的機器人實驗驗證了交互式穿衣方案。
英國約克大學機器人學助理教授朱吉鴻在機器人領域頂刊IEEE Transactions on Robotics上發表題為”Do you need a hand – a bimanual robotics assistive dressing scheme”的工作,顛覆了傳統使用一個機械臂進行輔助穿衣的框架,首次提出了雙臂協作穿衣的概念。
傳統的機械臂穿衣大多采取單機械臂方案:
通常需要假定手臂姿態是靜態的,或者需要額外的傳感器和算法來跟蹤手臂姿態,
在穿衣過程中,人的手臂會懸在空中,這通常會很累,
對于某些初始手臂姿勢,可能會失敗/卡在肘部
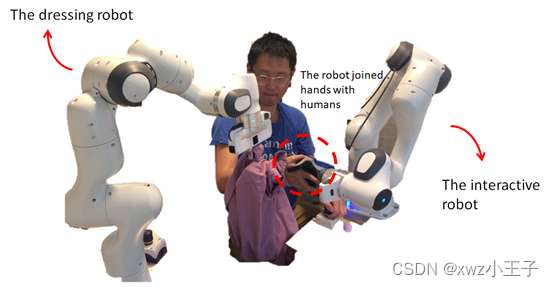
鑒于以上局限性,并受到護理專家所采取的策略的啟發,我們設計了一種雙臂輔助穿衣框架:
無需額外的傳感器即可跟蹤手臂姿勢,
為穿衣服的手臂提供支撐和引導力,
在順應的同時拉伸人體手臂,以獲得便于穿衣的姿勢。
首先我們看看護理專家如何幫助人穿衣?

我們的雙臂硬件實現:
整個算法框架包含3個主要部分:交互機器人控制器、姿勢估計和穿衣動作生成器,如下同所示:
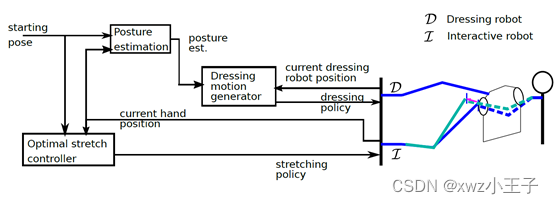
交互機器人控制器是通過分析不同手臂姿勢下的穿衣行為來設計的,以方便穿衣。交互機器人控制器將人類手臂的初始姿勢與當前的手部位置結合起來,為交互式機器人提供運動策略。姿態估算模塊受益于人與機器人牽手,可進行實時姿態跟蹤,該模塊接收與拉伸控制器相同的輸入,并輸出估計的當前手臂姿態。 該模塊不依賴任何外部傳感器(包括視覺)。利用估計的姿勢,我們定義了與姿勢相關的穿衣坐標系,并將笛卡爾坐標中的機器人運動轉換為穿衣坐標,以便從人類示范中學習穿衣動作生成器。采用 模仿學習的好處之一是,非機器人專業的人也可以對運動進行編程。通過定義的穿衣坐標系,可以對穿衣策略進行靈活編碼,以適應不同的手臂長度。穿衣動作生成器的輸入是估計姿勢和當前穿衣機器人的位置。利用這些輸入,它可以生成下一步的穿衣策略。
由于這是首次在為人類穿衣時使用這種雙臂裝置,因此所提議的框架存在兩大局限性:
我們在文章中假設穿衣過程中肩部保持靜止,這并不總是正確的,因為交互式機器人在伸展手臂時,肩部更有可能向前移動。向前移動的肩膀會隨之增加手臂的長度(因為現在完全伸展后,手可以伸得更遠)。長度的增加可能會導致手臂姿態估計方案無法解決,從而導致整個方案失敗。
肘部角度被認為是影響穿衣的關鍵參數,然而,穿衣機器人和交互機器人之間并沒有明確的協調算法,以確保穿衣機器人在穿過肘部時,交互機器人已經使肘部角度足夠大,從而避免被卡住。
純粹從算法方面解決第一個限制是很困難的,一種可能性是將逆運動學與基于視覺的跟蹤相結合,以獲得更精確的姿勢估計。第二個限制更為棘手,為了使協調明確化,需要對不同肘部角度的穿衣情況進行全面分析,以確定肘部角度的邊界條件,此外,還需要對人類一方進行假設(例如被動假設),以確保交互式機器人總能在穿衣手臂到達肘部之前成功地將人類手臂帶入有利姿勢。
未來工作的另一個可能方向是安全分析。我們沒有明確分析整個系統的安全性。但是,對于輔助機器人來說,確保機器人輔助過程中的人類安全至關重要。
盡管存在上述局限性,但我們的研究是第一個考慮使用雙臂進行交互式穿衣輔助的。該框架的靈感來自于護理專家,這使得該方案能夠更好的為人所接受。它代表了穿衣任務思維模式的轉變,即從“單機器人對單臂”設置轉變為“雙機器人對單臂”。



)




airtest操作)




)





