一、環境配置
官方鏈接:
環境配置
1.安裝必要的庫和軟件
sudo apt-get install build-essential gcc g++ make zlib* libffi-dev e2fsprogs pkg-config flex bison perl bc openssl libssl-dev libelf-dev libc6-dev-amd64 binutils binutils-dev libdwarf-dev u-boot-tools mtd-utils gcc-arm-linux-gnueabi cpio device-tree-compiler
2.安裝python3
1.查看python版本號
python3 --version
2.安裝python3.8
如果低于python3.7版本,不建議直接升級,請按照如下步驟重新安裝。以python3.8為例,按照以下步驟安裝python。
我的ubuntu版本是18.04 ,執行下面命令
sudo apt-get install python3.8
3.設置python和python3軟鏈接為python3.8
sudo update-alternatives --install /usr/bin/python python /usr/bin/python3.8 1
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.8 1
4.安裝并升級Python包管理工具(pip3)
我這里選擇命令行的方式進行安裝。
sudo apt-get install python3-setuptools python3-pip -y
sudo pip3 install --upgrade pip
3.安裝hb
運行如下命令安裝hb
python3 -m pip install --user ohos-build
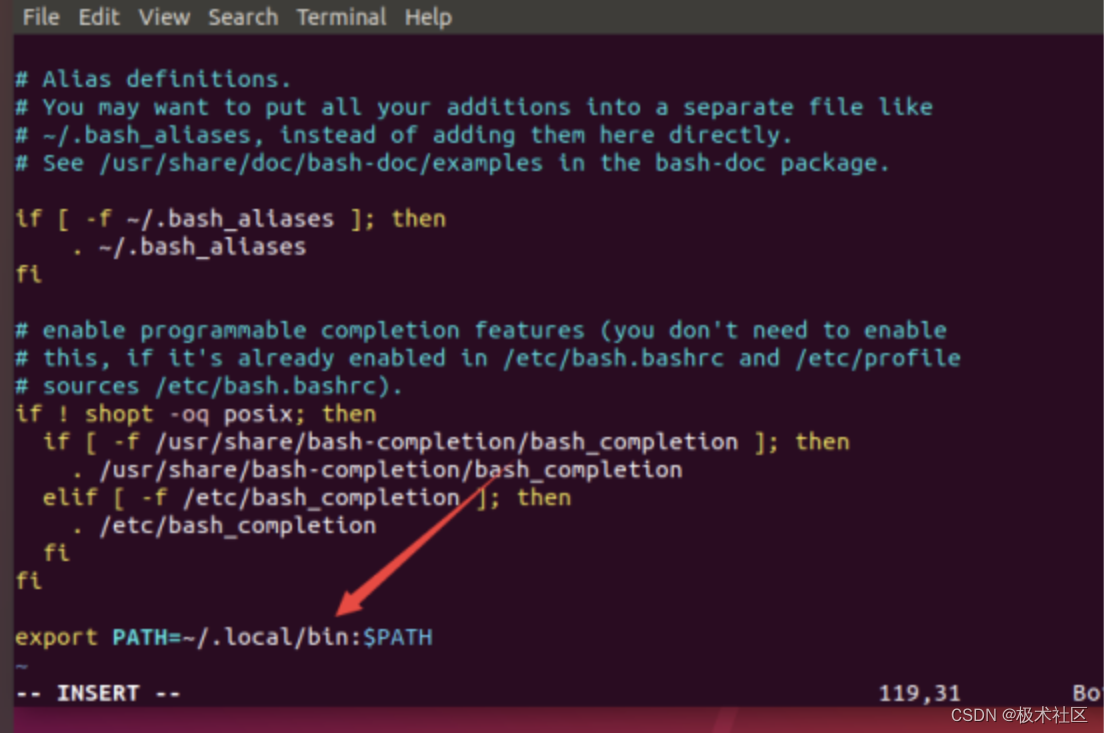
設置環境變量
vim ~/.bashrc
將以下命令拷貝到.bashrc文件的最后一行,保存并退出。
export PATH=~/.local/bin:$PATH
執行如下命令更新環境變量。
source ~/.bashrc

執行"hb -h",有打印以下信息即表示安裝成功:
`usage: hb
OHOS build system
positional arguments:
{build,set,env,clean}
build Build source code
set OHOS build settings
env Show OHOS build env
clean Clean output
optional arguments:
-h, --help show this help message and exit`
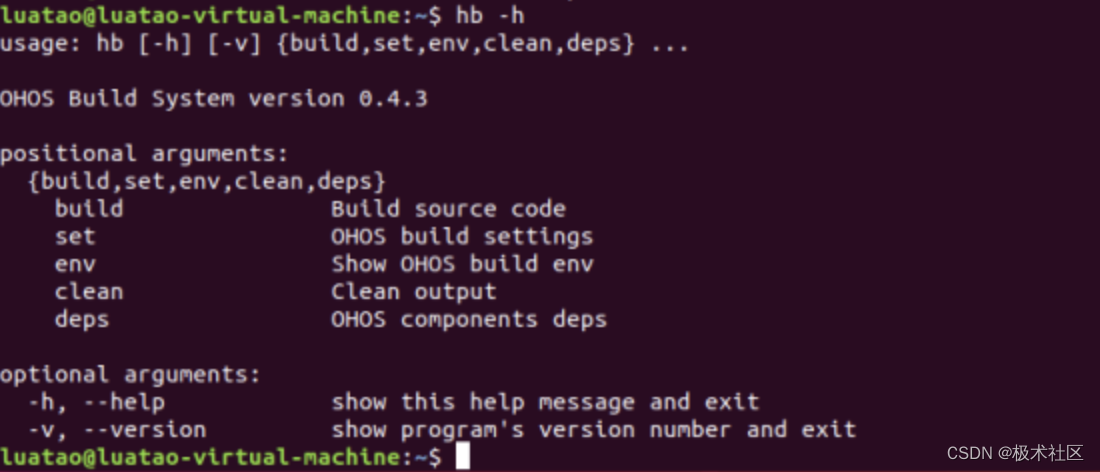
可以輸入hb -v查看hb的版本號

二、Gcc編譯鏈安裝
1.下載arm toolchain
在openharmony下面創建一個tool文件夾
然后執行
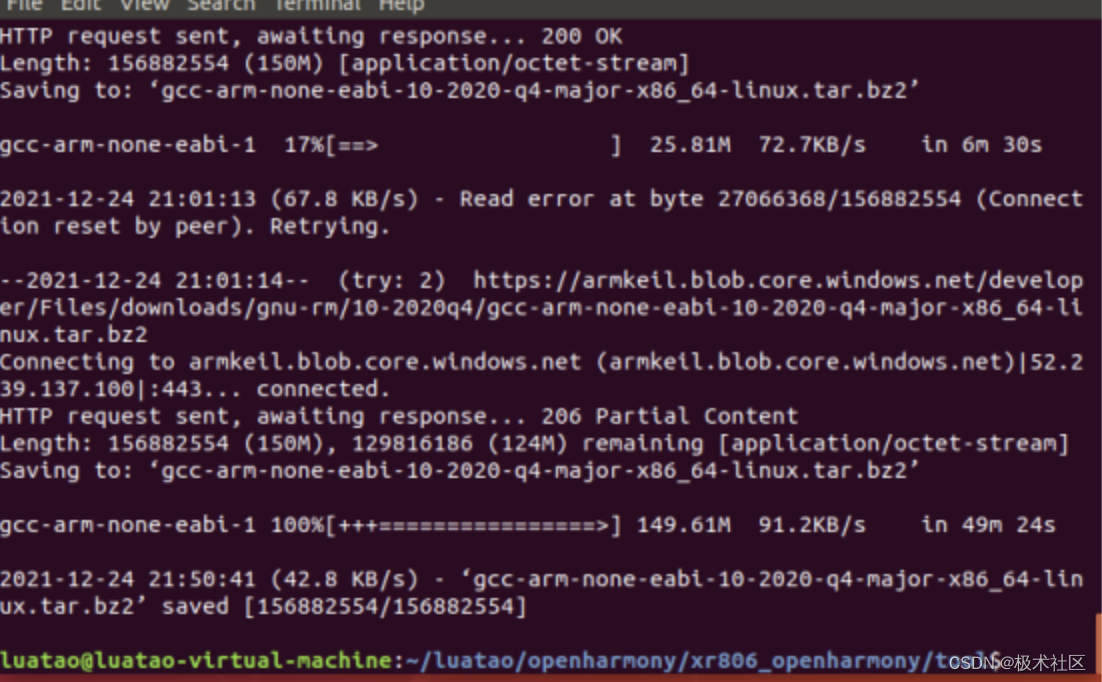
wget -c https://developer.arm.com/-/media/Files/downloads/gnu-rm/10-2020q4/gcc-arm-none-eabi-10-2020-q4-major-x86_64-linux.tar.bz2
下載會有一點慢(稍微等待一下)
下載完成。
用ls命令查看

解壓
tar -vxf gcc-arm-none-eabi-10-2020-q4-major-x86_64-linux.tar.bz2
2.配置
創建 ~/tools 目錄
mkdir ~/tools
將解壓的文件夾拷貝到~/tools文件夾下
cp gcc-arm-none-eabi-10-2020-q4-major ~/tools/ -r
注:~表示你的/home/用戶名目錄
我這里是/home/luatao
復制好之后可前往查看
三、下載源碼
1.repo工具
1.下載repo工具
如果沒有repo工具,可通過下面的git命令獲取repo。
git clone https://gerrit-googlesource.lug.ustc.edu.cn/git-repo
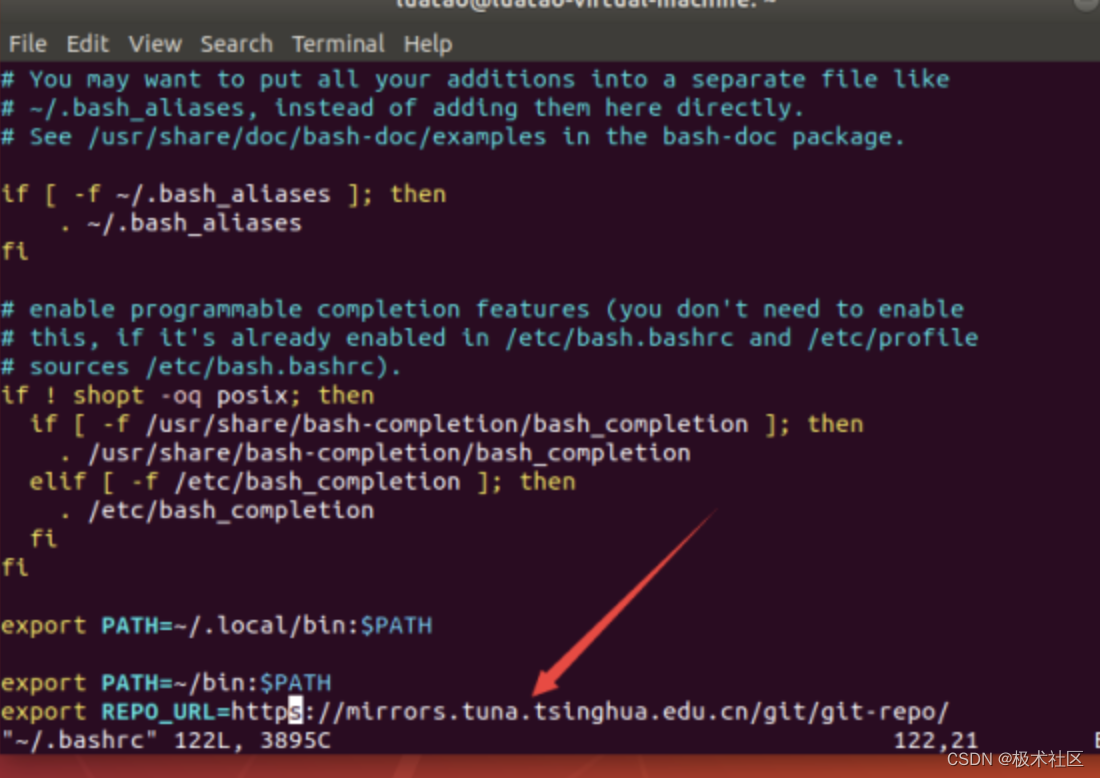
2.修改repo鏡像地址
當直接執行repo init時候,系統會提示連接超時。
因為Repo init 默認會訪問的url地址https://gerrit.googlesource.com/git-repo往往會失敗;
所以我們需要替換為國內的地址
依次執行下面的命令
vim ~/.bashrc export PATH=~/bin:$PATH export REPO_URL=https://mirrors.tuna.tsinghua.edu.cn/git/git-repo/
2.獲取鴻蒙系統源碼
在ubuntu上下載
創建一個文件夾openharmony,好管理
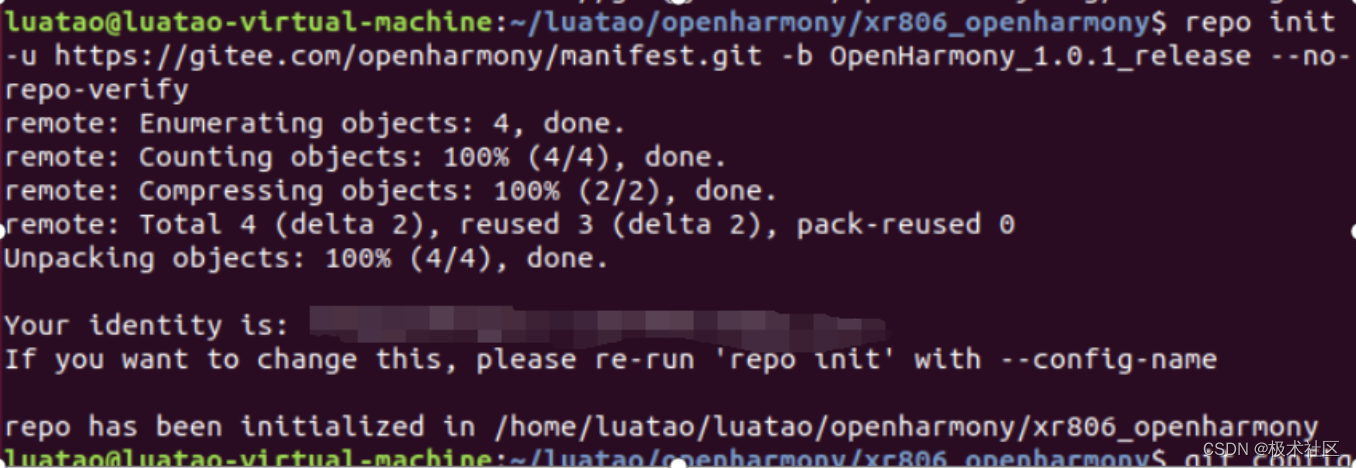
執行
repo init -u https://gitee.com/openharmony/manifest.git -b OpenHarmony_1.0.1_release --no-repo-verify
然后再執行
repo sync -c
repo forall -c 'git lfs pull'

3.下載X806源碼
1.放到device文件夾下
git clone https://gitee.com/openharmony-sig/devboard_device_allwinner_xr806.git
上面這個鏈接已經被廢除了。
執行會報錯
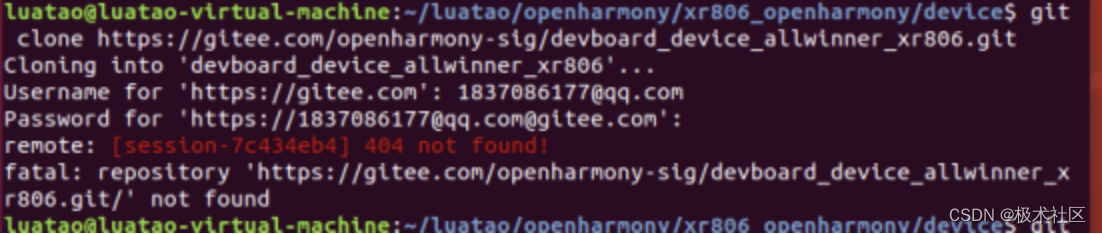
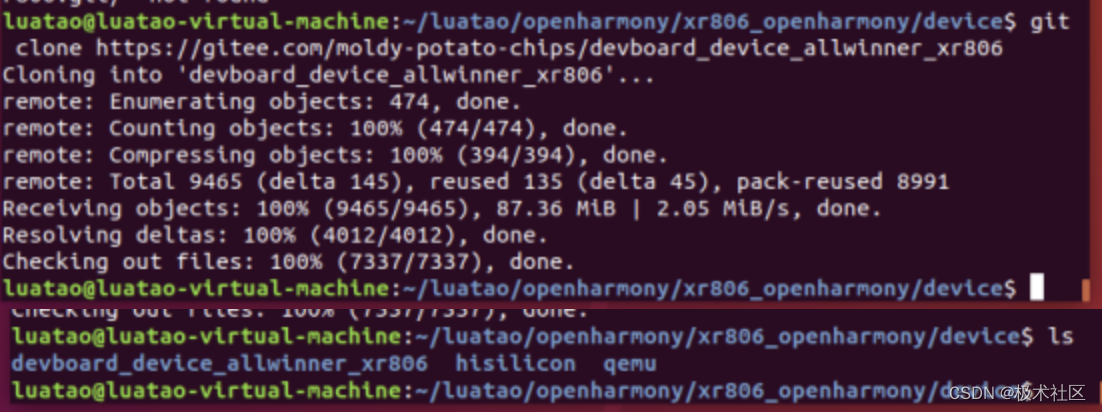
git clone https://gitee.com/moldy-potato-chips/devboard_device_allwinner_xr806
2.放到vendor文件夾下
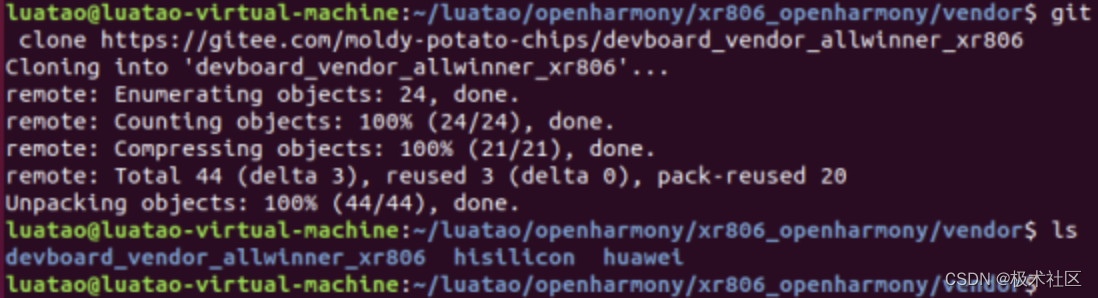
git clone https://gitee.com/openharmony-sig/devboard_vendor_allwinner_xr806.git
上面這個鏈接已經被廢除了。
git clone https://gitee.com/moldy-potato-chips/devboard_vendor_allwinner_xr806
3.修改文件夾名稱
進入device文件夾下,執行
mv devboard_device_allwinner_xr806/ xradio

進入vendor文件夾下,執行
mv devboard_vendor_allwinner_xr806 xradio

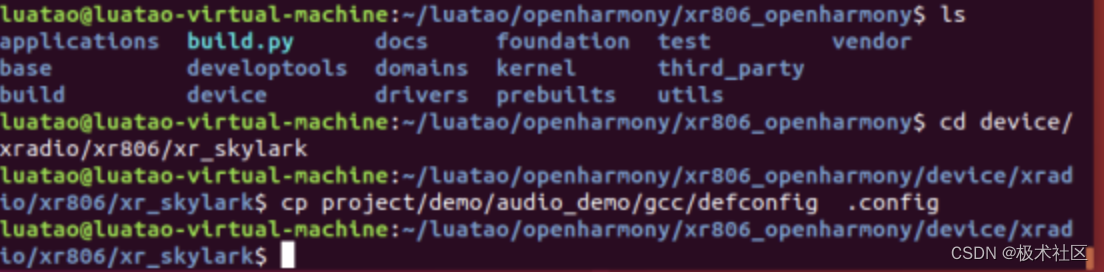
四、對代碼工程進行配置
cd device/xradio/xr806/xr_skylark
進入到xr_skylark目錄(原生SDK目錄)
1.復制配置文件
cp project/demo/audio_demo/gcc/defconfig .config
2.圖形化界面配置
make menuconfig
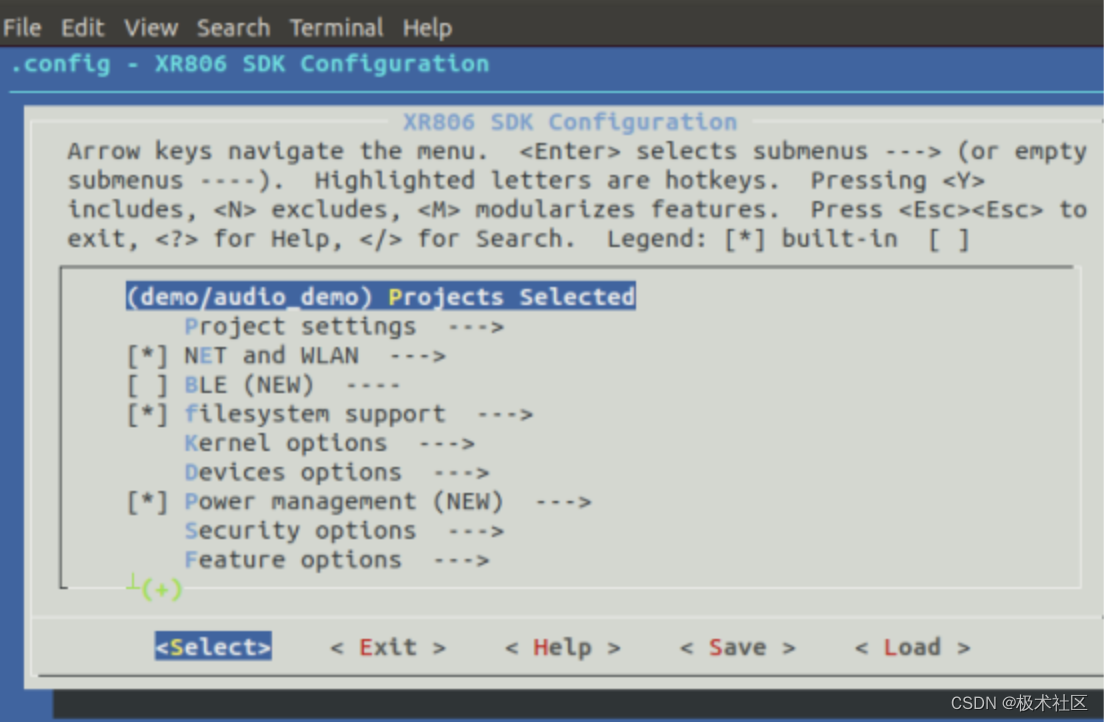
這里先不進行配置 ,雙擊esc,選擇no退出
3.清除舊配置
make build_clean
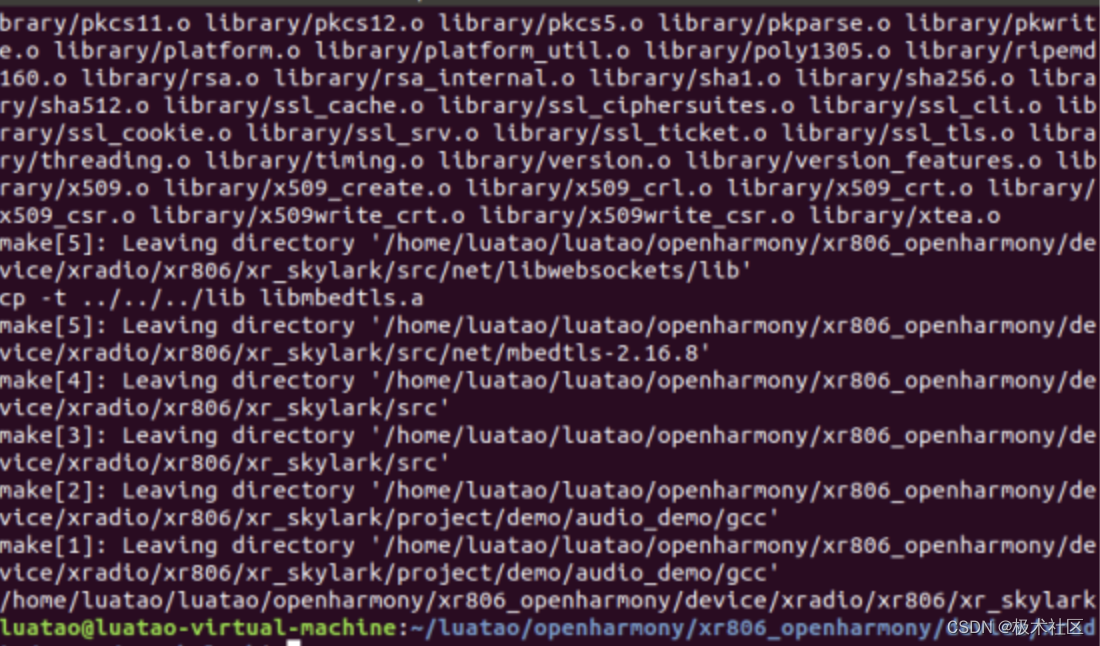
4.根據配置生成靜態庫和全局頭文件
make lib -j
5.選擇wifi_skylark
返回openharmony根目錄
cd -
選擇wifi_skylark
hb set

此時再按下一回車,出現
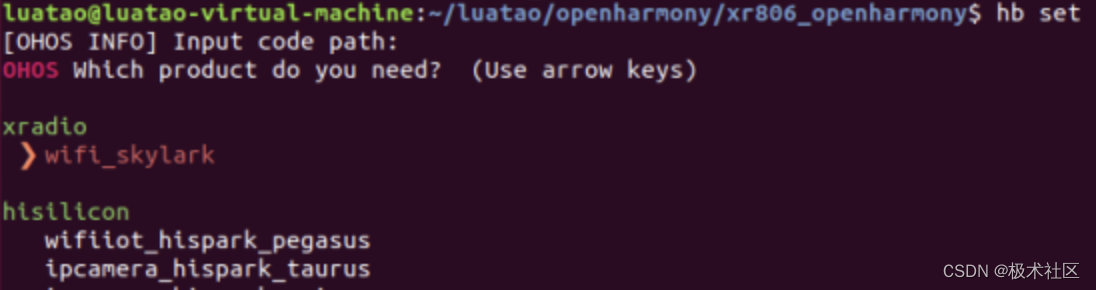
此時選擇wifi_shylark,再按下一回車。

五.編譯,后續不需要重新配置
1.編譯
hb build -f
從上面可以看出編譯成功。
2.鏡像文件
生成的鏡像文件在 源碼目錄//device/xradio/xr806/xr_skylark/out
在我這里就是
/home/luatao/luatao/openharmony/xr806_openharmony/device/xradio/xr806/xr_skylark/out

六、固件燒錄
1.拷貝燒錄軟件和燒錄鏡像
編譯生成的固件在device/xradio/xr806/xr_skylark/out,名稱為xr_system.img。
XR806的燒錄固件為phoenixMC_xxxx.exe,文件位于device/xradio/xr806/xr_skylark/tools。
我們可以進入看一下,就是箭頭指向的這個文件。
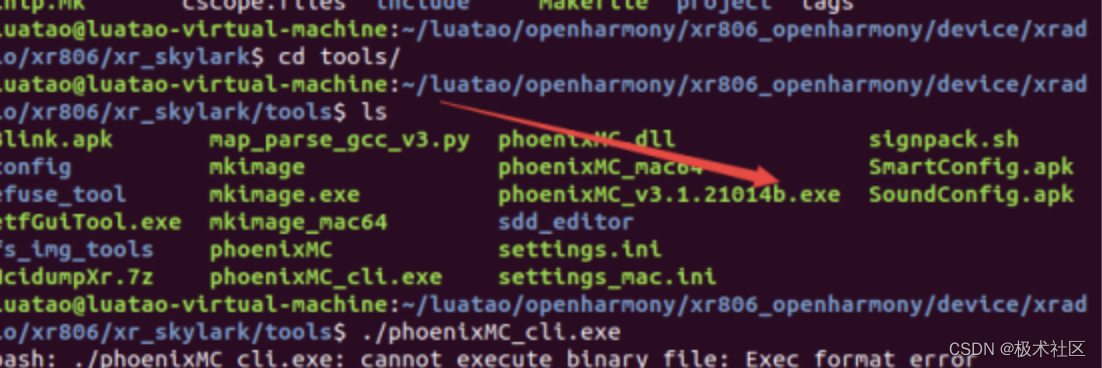
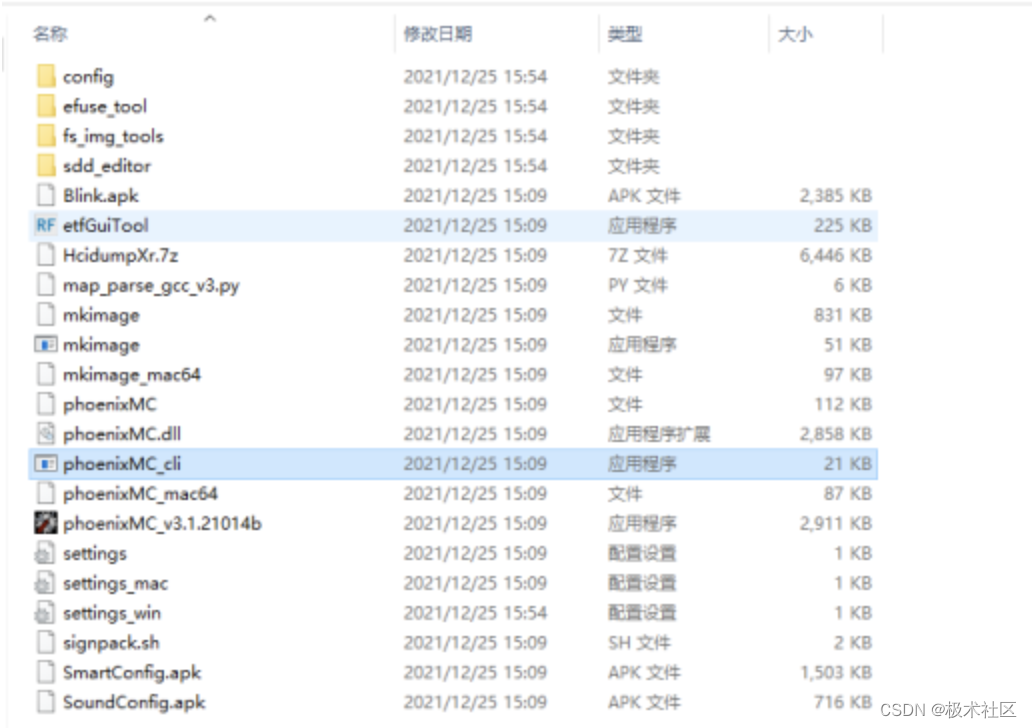
我們可以通過winsp將這個文件拷貝到windows上(注意這里不要只單獨拷貝這個文件,需要將tool文件夾一起拷貝過來,因為需要一些dll文件)
然后我們雙擊打開
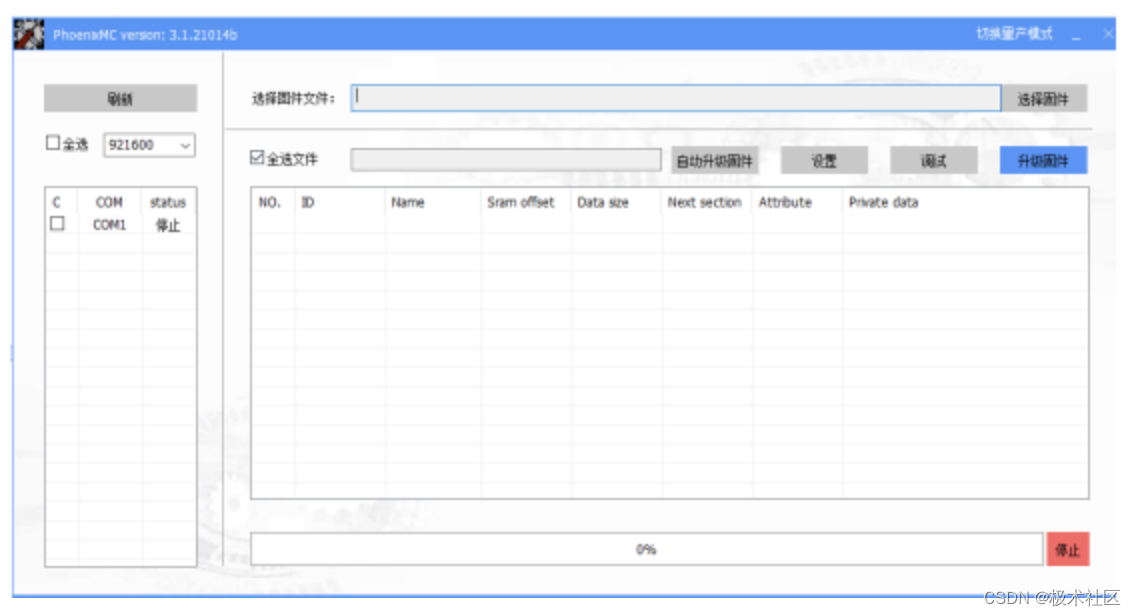
2.燒錄步驟
1.上電
插上我們的板子(需要安裝cp2102驅動,自行百度)
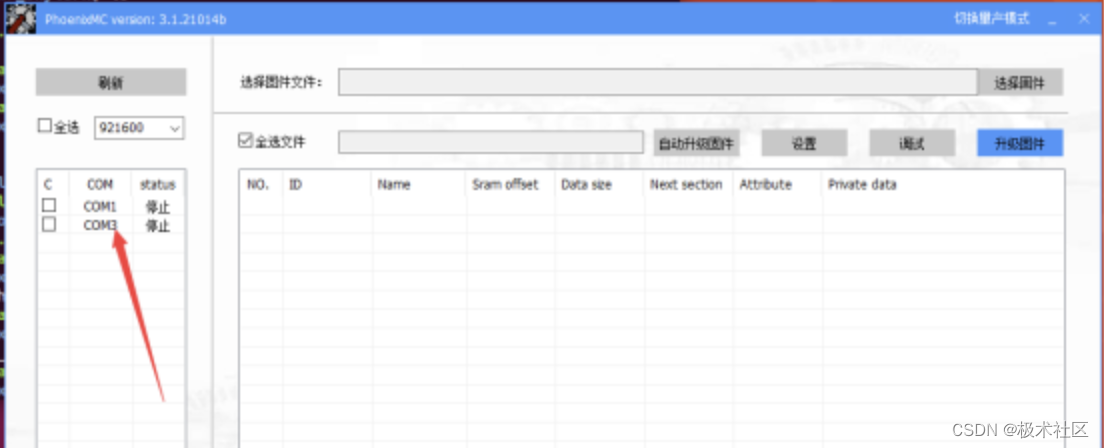
然后點擊刷新一下,會多出來一個串口,勾上。
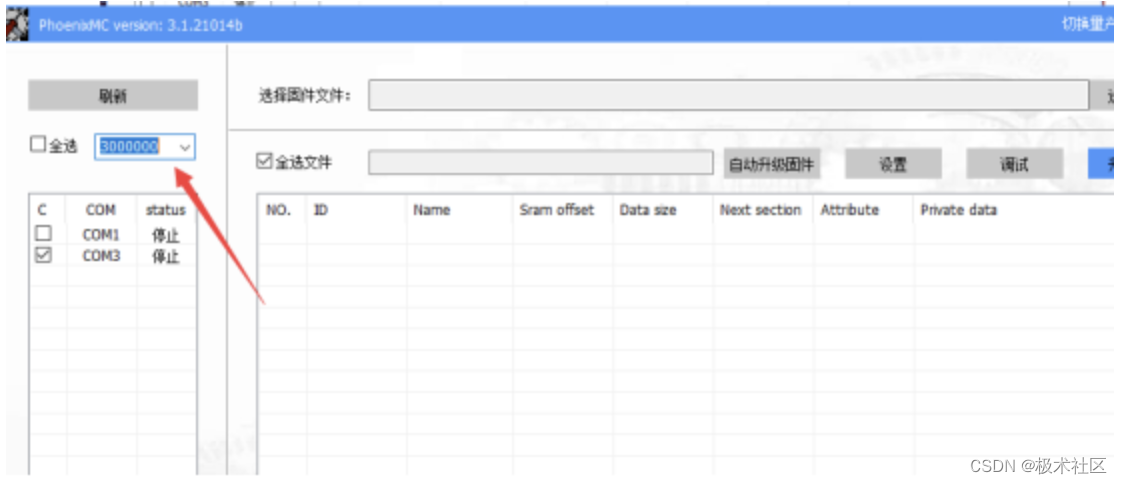
2.修改波特率
修改燒錄速率,從921600修改為3000000。
3.選擇固件
點擊“選擇固件”,選擇xr_system.img(需要我們從ubuntu中拷貝出來)。
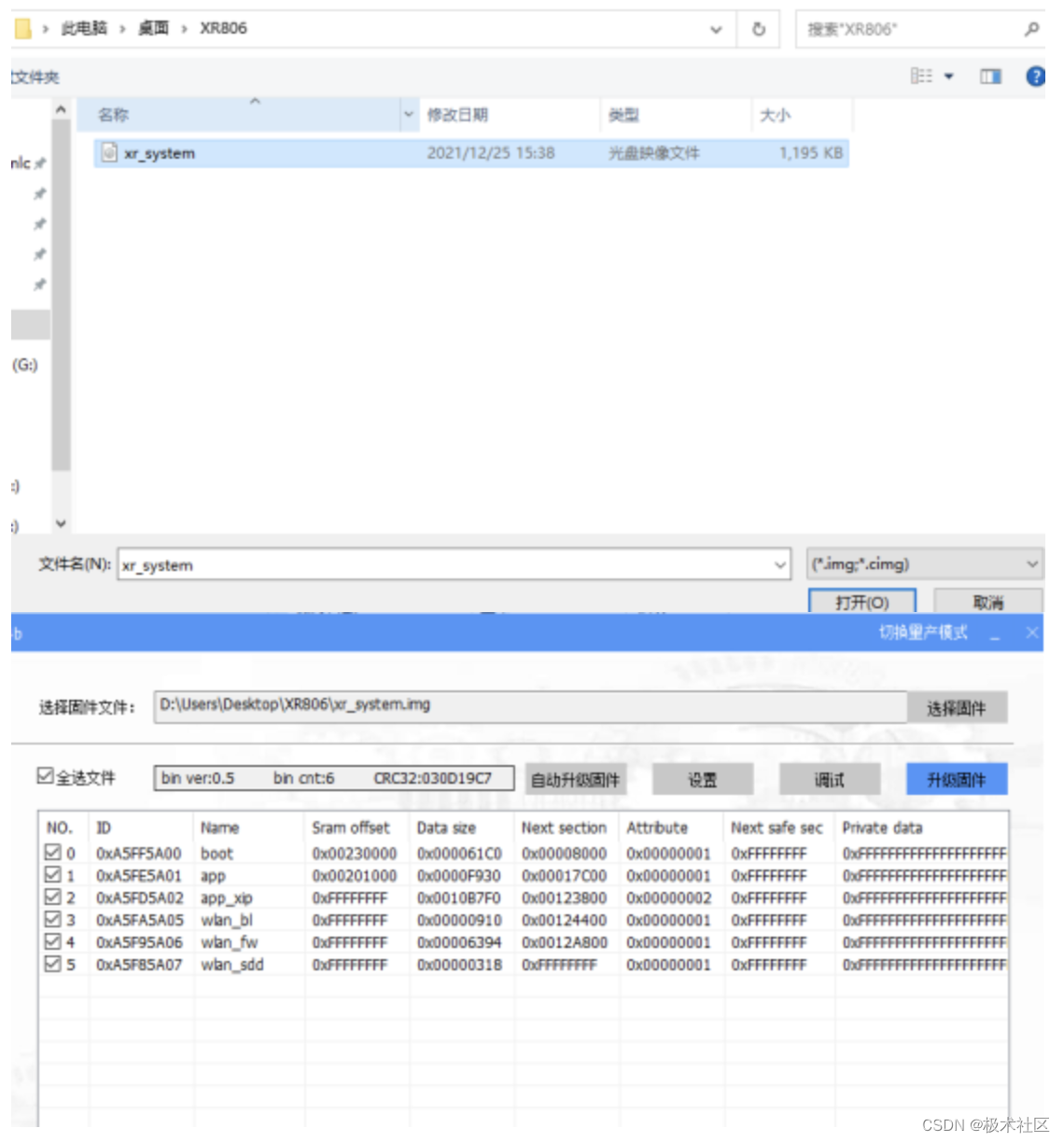
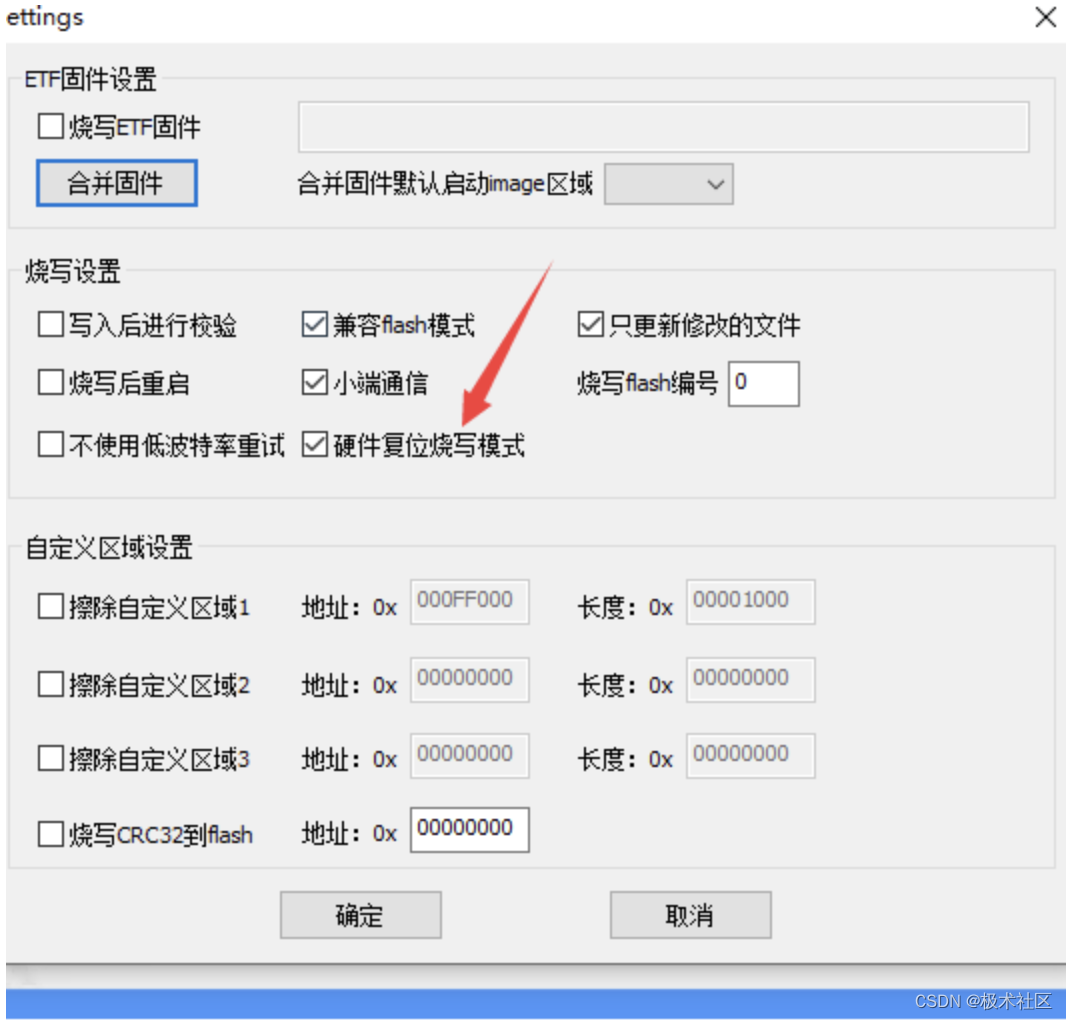
4.設置
點擊“設置”,勾選“硬件復位燒寫模式”
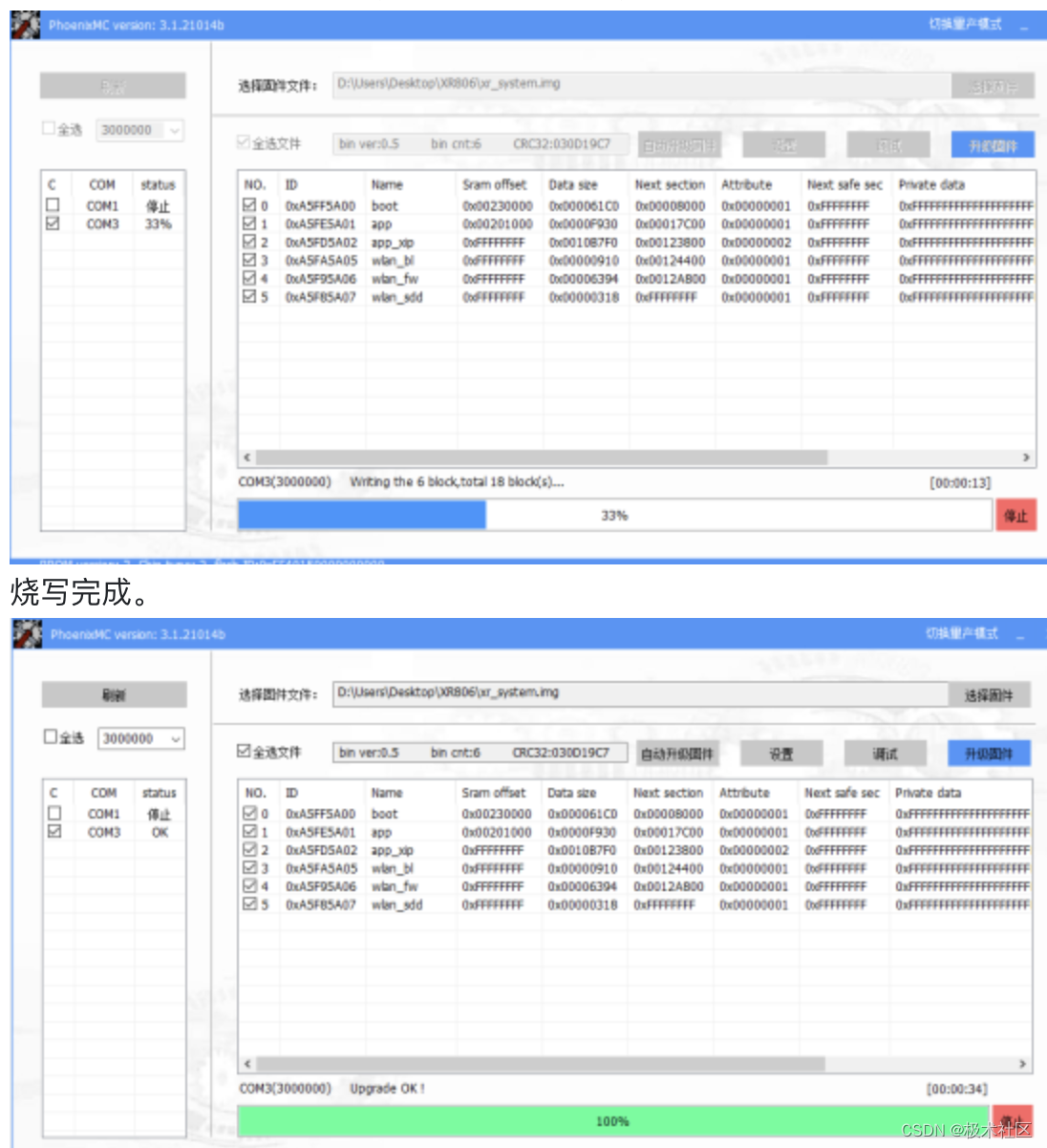
5.升級固件
設置完成后界面如下圖所示,點擊“升級固件”,等下方的進度條完成即可。
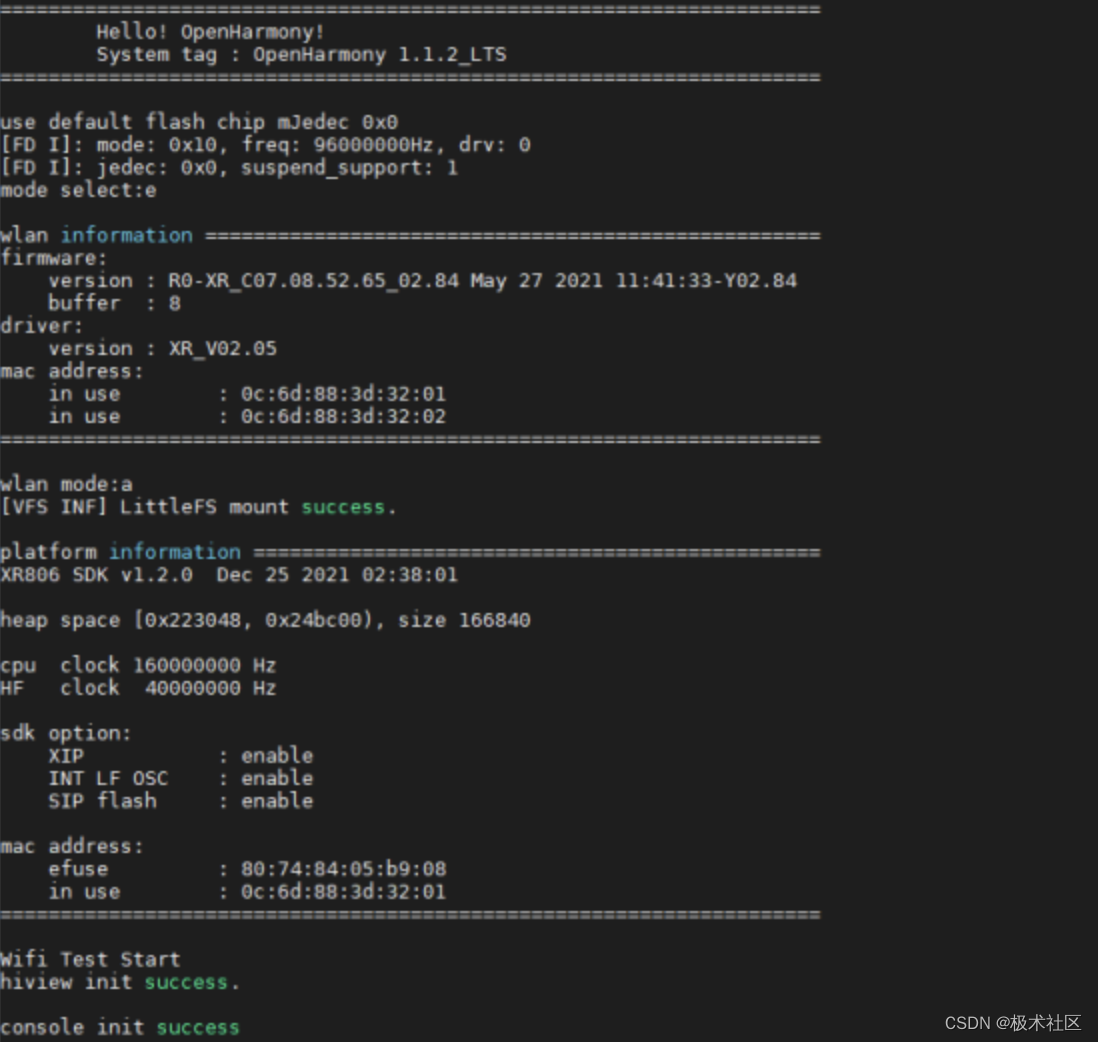
七、終端打印
找一個終端工具,選擇串口連接,波特率設置為115200.
按下復位鍵,打印下面的信息,即燒錄成功。







)





)
 技術應用實踐)


)

