Leetcode?62.不同路徑
題目鏈接:62 不同路徑
題干:一個機器人位于一個?
m x n?網格的左上角 (起始點在下圖中標記為 “Start” )。機器人每次只能向下或者向右移動一步。機器人試圖達到網格的右下角(在下圖中標記為 “Finish” )。問總共有多少條不同的路徑?
思考一:動態規劃。
- 確定dp數組(dp table)以及下標的含義
dp[i][j] :表示從(0 ,0)出發,到(i, j) 有dp[i][j]條不同的路徑。
- 確定遞推公式
從dp[i][j]的定義可以看出,只能有兩個方向來推導出來,即dp[i - 1][j]向右走 和 dp[i][j - 1]向下走。
所以dp[i][j] = dp[i - 1][j] + dp[i][j - 1]。
- dp數組的初始化
首先dp[i][0]一定都是1,因為從(0, 0)的位置到(i, 0)的路徑只有一條,dp[0][j]也同理。代碼如下:
for (int i = 0; i < m; i++) dp[i][0] = 1;
for (int j = 0; j < n; j++) dp[0][j] = 1;
- 確定遍歷順序
從遞歸公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1];中可以看出,dp[i][j]是依賴 dp[i - 1][j]和 dp[i][j - 1],那么遍歷的順序一定是從左到右一層一層遍歷的。
- 舉例推導dp數組
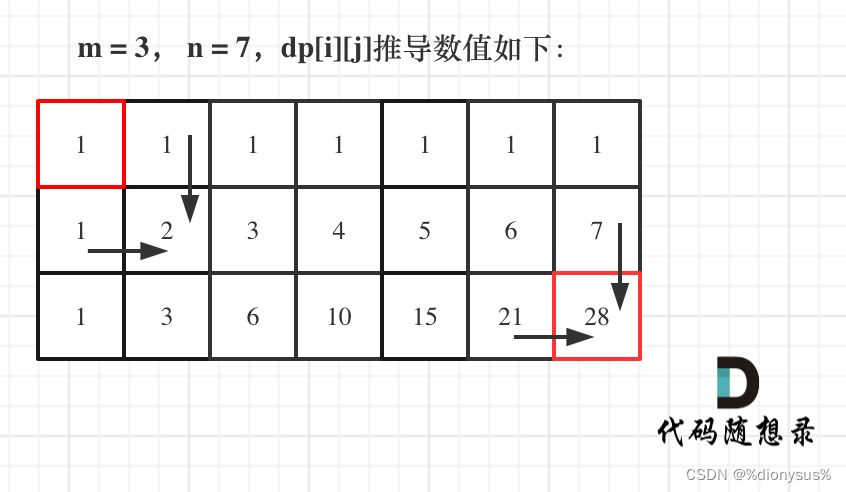
代碼:
class Solution {
public:int uniquePaths(int m, int n) {int dp[m][n]; //記錄到達下標(i,j)的路徑數//初始化for (int i = 0; i < m; i++) //從起始點一直到最右邊只存在一條路徑dp[i][0] = 1;for (int j = 0; j < n; j++) //從起始點一直到最下邊只存在一條路徑dp[0][j] = 1;for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++)dp[i][j] = dp[i - 1][j] + dp[i][j - 1]; //遞推公式}return dp[m - 1][n - 1];}
};優化:其實用一個一維數組(可以理解是滾動數組)即可,可以優化空間。
代碼:
class Solution {
public:int uniquePaths(int m, int n) {vector<int> dp(n);for (int i = 0; i < n; i++) dp[i] = 1; //初始化for (int j = 1; j < m; j++) {for (int i = 1; i < n; i++) { //處理每列元素dp[i] += dp[i - 1];}}return dp[n - 1];}
};思考二:深度優先搜索。題目中說機器人每次只能向下或者向右移動一步,那么其實機器人走過的路徑可以抽象為一棵二叉樹,而葉子節點就是終點!如圖:

但如果只是按以上思路同一位置多次計算,會超時。因此要加上備忘錄,初始化為-1。終止條件加上判斷當前位置備忘錄是否記錄過,記錄過則直接返回數據。單層遞歸處理邏輯也要記錄數據。?
代碼:
class Solution {
public:vector<vector<int>> memo; //添加備忘錄int dfs(int row, int col, const int m, const int n) {if (row > m || col > n) return 0; //超出邊界返回0if (row == m && col == n) return 1; //搜索到一條路徑if (memo[row][col] != -1) return memo[row][col]; //訪問過則直接返回記錄值int right = dfs(row + 1, col, m, n); //向右移動int down = dfs(row, col + 1, m, n); //向下移動memo[row][col] = right + down; //記錄數據return memo[row][col]; }int uniquePaths(int m, int n) {if (m < 1 || n < 1) return 0;memo = vector<vector<int>>(m + 1, vector<int>(n + 1, -1));return dfs(1, 1, m, n);}
};思考三:數論法。
在下圖中,可以看出一共m,n的話,無論怎么走,走到終點都需要 m + n - 2 步。

在這m + n - 2 步中,一定有 m - 1 步是要向下走的,不用管什么時候向下走。
那么路徑問題就轉換為,給你m + n - 2個不同的數,隨便取m - 1(或n - 1)個數,有幾種取法。
這便是組合問題。答案為或
,取較小值計算。
求組合要防止兩個int相乘溢出。?所以不能把算式的分子都算出來,分母都算出來再做除法。
代碼:
class Solution {
public:int uniquePaths(int m, int n) {long long numerator = 1; //分子int denominator = 1; //分母int count = m > n ? n - 1 : m - 1;int num = m + n - 2;while (count > 0) { //邊乘邊除numerator *= num;denominator *= count;if (denominator != 1 && numerator % denominator == 0) { //可整除numerator /= denominator;denominator = 1;}num--;count--;}return numerator;}
};Leetcode?63. 不同路徑 II
題目鏈接:63 不同路徑 II
題干:一個機器人位于一個?
m x n?網格的左上角 (起始點在下圖中標記為 “Start” )。機器人每次只能向下或者向右移動一步。機器人試圖達到網格的右下角(在下圖中標記為 “Finish”)。
現在考慮網格中有障礙物。那么從左上角到右下角將會有多少條不同的路徑?
網格中的障礙物和空位置分別用?
1?和?0?來表示。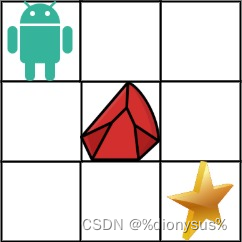
思考一:動態規劃。
和上題的區別僅在障礙物,因此思路僅在確定遞推公式和dp數組的初始化兩步存在差異
- 確定遞推公式
從dp[i][j]的定義可以看出,只能有兩個方向來推導出來,即dp[i - 1][j]向右走 和 dp[i][j - 1]向下走。
正常公式應為dp[i][j] = dp[i - 1][j] + dp[i][j - 1]。
但障礙物所在位置不可達,因此在處理前先判斷。代碼如下:
if (obstacleGrid[i][j] == 1) //此下標位置存在障礙物 continue; - dp數組的初始化
由于障礙物的存在,因此只有在未碰到障礙物的前面位置dp[i][0]=1。dp[0][j]也同理。代碼如下:
for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) //從起始點向右直到碰到邊界或者障礙物只存在一條路徑dp[i][0] = 1;
for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) //從起始點向下直到碰到邊界或者障礙物只存在一條路徑dp[0][j] = 1;代碼:
class Solution {
public:int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {int m = obstacleGrid.size();int n = obstacleGrid[0].size();if (obstacleGrid[m - 1][n - 1] == 1 || obstacleGrid[0][0] == 1) //如果在起點或終點出現了障礙直接返回0return 0;vector<vector<int>> dp(m, vector<int>(n, 0)); //記錄到達下標(i,j)的路徑數 //初始化for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) //從起始點向右直到碰到邊界或者障礙物只存在一條路徑dp[i][0] = 1;for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) //從起始點向下直到碰到邊界或者障礙物只存在一條路徑dp[0][j] = 1;for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {if (obstacleGrid[i][j] == 1) continue; //此下標位置存在障礙物dp[i][j] = dp[i - 1][j] + dp[i][j - 1]; //遞推公式}}return dp[m - 1][n - 1];}
};思考二:深度優先搜索。僅在終止條件這多加碰到障礙物則此條路徑作廢返回0即可。當然還得加上備忘錄減少處理時間。
代碼:
class Solution {
public:vector<vector<int>> memo; //添加備忘錄int dfs(int row, int col, const int m, const int n, const vector<vector<int>>& obstacleGrid) {if (row > m - 1 || col > n - 1) return 0; //超出邊界返回0if (obstacleGrid[row][col] == 1) return 0; //碰到障礙物返回0if (row == m - 1 && col == n - 1) return 1; //搜索到一條路徑if (memo[row][col] != -1) return memo[row][col]; //訪問過則直接返回記錄值int right = dfs(row + 1, col, m, n, obstacleGrid); //向右int down = dfs(row, col + 1, m, n, obstacleGrid); //向下memo[row][col] = right + down; //記錄數據return memo[row][col];}int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {int m = obstacleGrid.size();int n = obstacleGrid[0].size();memo = vector<vector<int>>(m, vector<int>(n, -1));if (m < 1 || n < 1) return 0;return dfs(0, 0, m, n, obstacleGrid);}
};自我總結:
- 了解到C++備忘錄模式,減少處理時間。










)








