
本文來源:A. Rassolkin, T. Vaimann, A. Kallaste, and V. Kuts, “Digital twin for propulsion drive of autonomous electric vehicle,” in 2019 IEEE 60th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, Oct. 2019, pp. 1–4.
“ 自動駕駛不再只是技術愿景的概念,而是全世界真正的技術趨勢。 不斷發展到更高的自治程度需要能源優化方面的更多工作,卻很少使用自動和監控傳感器來優化自動駕駛電動汽車的電動推進驅動系統。 本研究的目的是為能源系統性能評估指定專門的無監督預后和控制平臺所需的任務。最終目標需要開發多個測試平臺和數字孿生體。 數字孿生由三個部分組成:現實世界中的物理實體,虛擬模型以及將兩個世界聯系在一起的關聯數據/視圖。”
數字孿生與機器學習
自DT概念引入以來,不僅人們對該概念的興趣和對其適用性的理解發生了重大變化,概念本身的視野也發生了變化。本研究提出了基于五個組成部分的新模型,而不是基于三個部分的原始模型:
?物理模型;
?虛擬模型;
?組件之間的連接;
?數字孿生數據;
?服務系統。
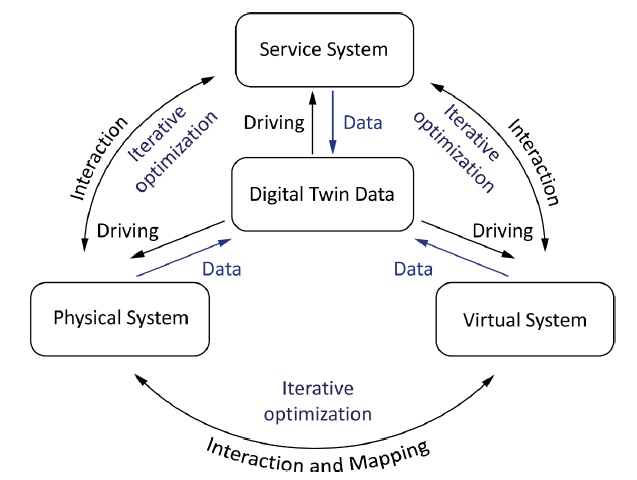
圖1顯示了組件之間的交互。所有組件相互依賴。物理系統為虛擬系統的開發提供了基礎,虛擬系統負責服務系統的仿真、控制和優化策略。可以使用不同的控制器和優化算法。服務系統是對物理和虛擬系統的需求做出響應的綜合服務平臺。DT數據是物理、虛擬和服務系統的綜合數據,也是建模、優化和預測的方法。由于數據是所有系統的驅動力,因此需要注意的是,通過將所有參與創建DT模型的系統的信息結合起來,可以形成更全面和一致的數據。基于此模型,EDPS的DT可以在實際的物理機器上實現之前,通過使用深度學習工具來幫助其優化。
進一步利用機器學習來幫助評估EPDS(電力推進驅動系統)的性能是目前一個日益增長的研究領域。不同版本的Kalman濾波器、支持向量機、決策樹和各種神經網絡結構是這一領域的主要工作工具。神經網絡方法中的主要步驟包括兩個步驟。第一步是訓練過程,其中與一組給定的EPDS性能數據相關聯的部分信號數據用于訓練網絡,另一部分用于驗證訓練過程。該程序需要測量或模擬數據,通常不容易獲得。第二步是利用訓練好的神經網絡,對電動助力轉向系統(EPDS)的性能進行分析,并通過運行裝置的實測數據提出運行方式的建議。一旦機器學習算法確定了輸入特征或變量(電流、電壓、環境溫度)之間的復雜關系與每個區域的局部溫升之間的相關性,它就能夠在線預測能源系統中最敏感的點。或者,深度學習算法,即卷積神經網絡-卷積神經網絡(CNN)或傳輸學習,可以是處理基于圖像特征或未標記數據的EPDS性能的一個有前途的選擇。第二步的結果是對EPDS的運行模式提出建議。這些方法的缺點在于訓練人工智能系統所需的數據量和質量以及評估EPDS性能的測量分辨率,這需要多個本地傳感器和傳感器與計算平臺之間進行大量的數據傳輸。這就是為什么很少計劃測試平臺。
試驗臺
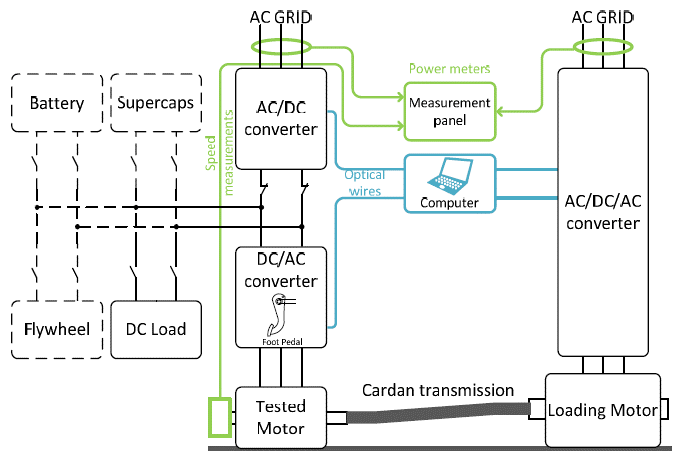
采用標準或至少是固定程序的實驗室試驗臺能夠對電子防護裝置的性能進行評價,為今后的初步研究和開發提供了一個附加值。早期設計是新產品開發過程中一個重要但往往被低估的設計階段,早期設計階段所做的決策對結果的影響要比后期的決策大得多。圖2顯示了允許EPD穩態和瞬態模式模擬的試驗臺概念。第一個神經網絡可以基于從實驗室試驗臺獲得的數據。作為第二個主測試平臺,將使用ISEAUTO平臺。ISEAAUTO是一款小型客車,主要在大學校園內行駛,因此車速限制在20公里/小時。
ISEAUTO的特點是完全符合項目目標的要求。ISEAAUTO的車身設計(如圖3所示)還考慮了自主巡航所需的傳感器位置。自動駕駛汽車的電子框架提供控制器軟件與推進電機驅動系統之間的通信,它有三個主要任務:制動、轉向和加速。與傳統汽車類似,制動任務包括駐車制動和減速。駐車制動器用于在乘客上車和無操作模式時保持車輛靜止。減速任務可以通過適當控制電動機來解決;但是,為了向乘客和車外人員提供所需的安全條件,減速電機制動應與液壓裝置相結合。通過在機器人操作系統(ROS)上的PC上運行Autoware來實現自治,ROS通過專用以太網與控制器進行通信,從而最大限度地減少延遲。任務關鍵型控制器分為兩層-主控制器層和驅動器控制器層。主控制器的主要任務是以最小的延遲將信息從PC機轉發到PC機。驅動控制器管理加速/制動信號、駐車制動器和方向盤。

該模型并不一定意味著3D可視化模型,因為它的重要性在于工藝流程和背后的數據,但是,通過DT模擬增加了用于在線遠程干擾的虛擬現實(VR)工具,增加了安全層,總體上為危險環境和遠程工作增加了更多可能性。多年前,大多數人認為虛擬現實只能用于游戲和其他娛樂目的,但事實上,它已經在研究中使用了幾十年。現在虛擬現實可以應用于人類活動的任何領域。這樣可以防止幾十個錯誤和錯誤而不造成任何損失。
總結
該概念的最終目標是為EPDS性能評估開發一個專門的無監督預測和控制平臺。這個目標需要開發幾個子任務和相關目標:
?開發不同能源系統組件(電機、發電機、齒輪箱、軸承等)的物理模型以及這些組件的相關簡化模型(試驗臺),這些模型將用于構建系統的DT。
?根據開發的DT概念,開發和實施虛擬傳感器的概念。
?開發基于人工智能的系統,允許使用虛擬傳感器控制EPD。
?開發上述概念的專門知識,并以ISEAUTO為例展示其實現上述最終目標的能力。
物理器件模型的建立可以使用成熟的建模技術(如MATLAB)進行。物理模型的簡化模型可以用模型降階方法構造。可將不同型號的EPDS-DT并行裝配。數字孿生體可以作為虛擬傳感器,也可以在數字孿生體中實現虛擬傳感器。將來自實際設備和虛擬傳感器的數據與機器學習例程相結合,將能夠對電能系統的設備進行診斷和預測。Digital twins不僅包括一個物理對象仿真(有關電機部件供應商的數據、提供的服務和未來的服務計劃、關于異常情況的數據等等)。模擬器基本上是根據歷史數據和物理/數學模型創建的。

![Sgen.exe: Speed up XmlSerializer's Startup Performance [.NET 2.0, XML Serialization]](http://pic.xiahunao.cn/Sgen.exe: Speed up XmlSerializer's Startup Performance [.NET 2.0, XML Serialization])






使用)


源碼解析)




解析)

解析)
