樹莓派攝像頭基礎配置
step 1 硬件連接
硬件連接,注意不要接反了,排線藍色一段朝向網口的方向。(筆者的設備是樹莓派4B)

step 2 安裝raspi-config
安裝 raspi-config
raspi-config在raspbian中是預裝的,而在kali、ubuntu mate、ubuntu server、osmc等系統中則是沒有內置raspi-config的,但是raspi-config的gui設置有時是相對方便的,比如kali默認沒有完整的使用整個SD卡空間,而針對樹莓派最好的擴展工具是raspi-config
-
下載deb包
wget http://mirrors.ustc.edu.cn/archive.raspberrypi.org/debian/pool/main/r/raspi-config/raspi-config_20200601_all.deb -
安裝相關依賴
sudo apt install lua5.1 libatopology2 libfftw3-single3 libsamplerate0 alsa-utils -
安裝raspi-config
sudo dpkg -i raspi-config_20200601_all.deb -
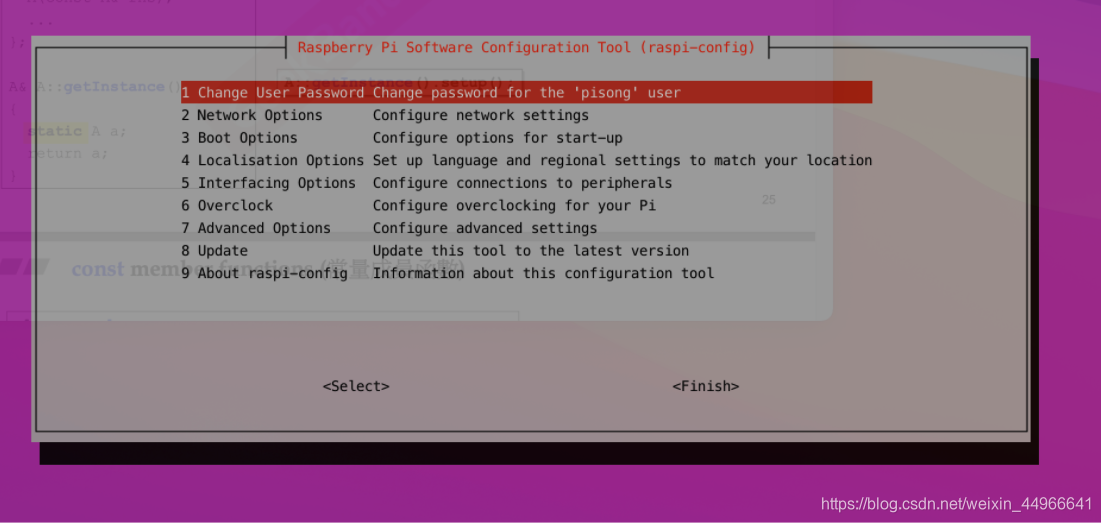
測試打開raspi-config,遠程ssh連接用終端也可以打開哦
sudo raspi-config出現以下界面表示安裝成功。
step 3 啟動攝像頭
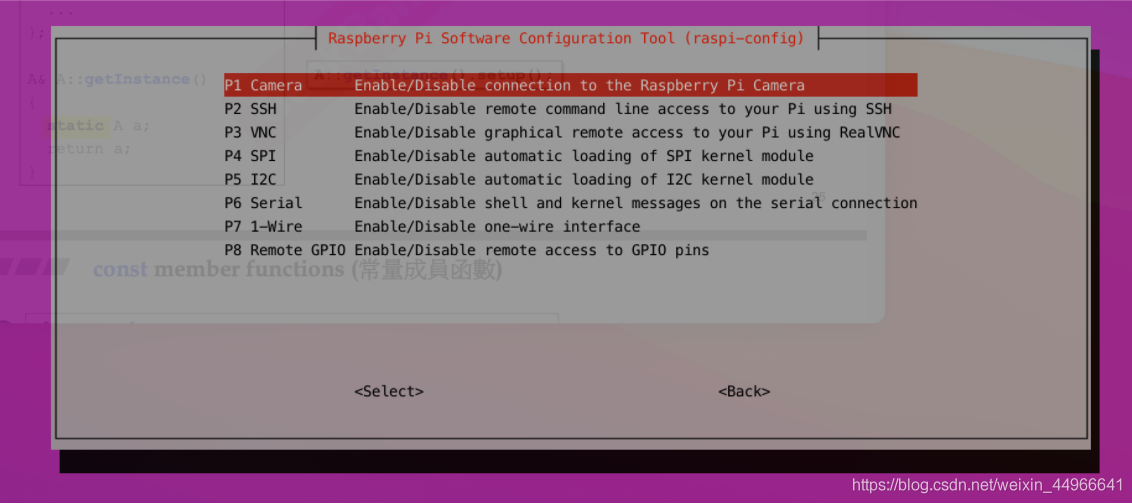
上一步成功后選擇iterfacing options,再選擇camera。
如果此步出現如下報錯的情況:

解決方法
先看一下自己的磁盤分區情況:
df -hl
找到/dev/mmcblk0p2,不同的機器后面的名稱可能不同。
掛載到/boot:
sudo mount /dev/mmcblk0p2 /boot
step 4 測試攝像頭
我們用拍照的形式測試攝像頭是否正常運作:
raspistill -v -o /tmp/a.jpg
如果攝像頭正常即可在/tmp目錄下,找到a.jpg文件。
OpenCV C++/Python 攝像頭測試代碼
C++:
#include <opencv.hpp>int main()
{//讀取視頻或攝像頭cv::VideoCapture capture(0);capture.set(cv::CAP_PROP_FRAME_WIDTH, 640);capture.set(cv::CAP_PROP_FRAME_HEIGHT, 480);while (true){cv::Mat frame;capture >> frame;cv::imwrite("cam_test.jpg", frame);cv::waitKey(30); //延時30}return 0;
}
Python:
import cv2vc = cv2.VideoCapture(0)
ret, frame = vc.read()
print(ret, frame)
if ret:img = frame
# print(img.shape)
cv2.imwrite('test.jpg', img)
之后打算做一下人臉識別手、勢識別之類的計算機視覺+樹莓派的應用,有興趣的小伙伴一起留言討論呀。
Ref:
https://blog.csdn.net/oray2013/article/details/90045179
https://blog.csdn.net/qq_34493401/article/details/107672691
https://my.oschina.net/zhenggao/blog/4336535



![RuntimeError: [enforce fail at inline_container.cc:145] . PytorchStreamReader failed reading zip arc](http://pic.xiahunao.cn/RuntimeError: [enforce fail at inline_container.cc:145] . PytorchStreamReader failed reading zip arc)

實現機制以及用C語言對其進行的模擬實現)

詳解)




用法分析)


![[2021-ICCV] MUSIQ Multi-scale Image Quality Transformer 論文簡析](http://pic.xiahunao.cn/[2021-ICCV] MUSIQ Multi-scale Image Quality Transformer 論文簡析)

)

