http://www.baidu.com/link?url=Aj_xhOM5Q6rpZXkTMBPq4o0UbCO4eLq0esX8B3K2v06bkRS8F8lC4k06rv-3uZARLLTEKJHMhwzI_cdcJiHfqK&wd=&eqid=904bc71f000181740000000356d7d9bf
https://www.zhihu.com/question/35818812/answer/66086727
知乎頁面訪問存在502 Bad Gateway問題,就將內容保存下來
知乎上的一個解答——DongLin,發呆工程師
著作權歸作者所有。
商業轉載請聯系作者獲得授權,非商業轉載請注明出處。
作者:DongLin
鏈接:https://www.zhihu.com/question/35818812/answer/66086727
來源:知乎
商業轉載請聯系作者獲得授權,非商業轉載請注明出處。
作者:DongLin
鏈接:https://www.zhihu.com/question/35818812/answer/66086727
來源:知乎
模式一和模式二提供了兩種不同的能力,適用于不同的場景,看商戶具體的需求。
兩種模式,在支付的流程中,有一定的共同的流程:
1,生成訂單。
2,用戶支付。
差別在于:
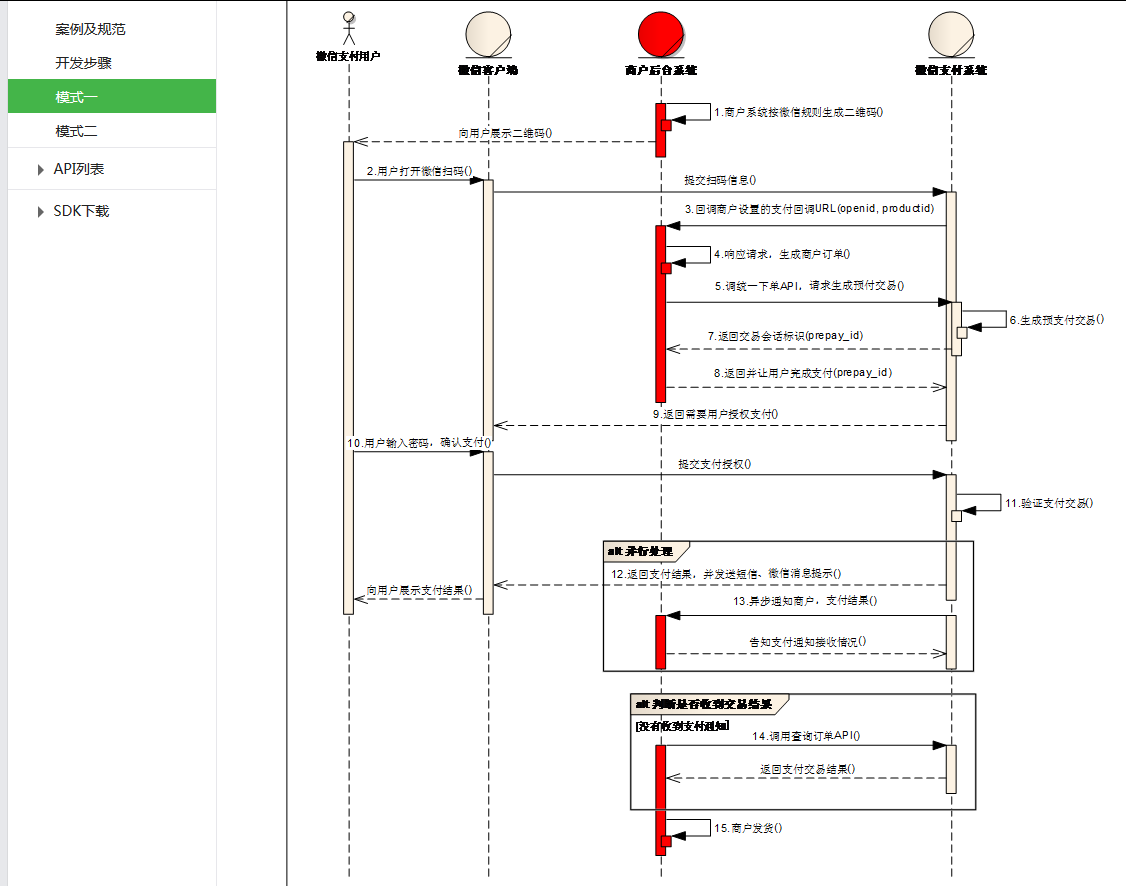
模式一,先掃碼,再生成訂單。
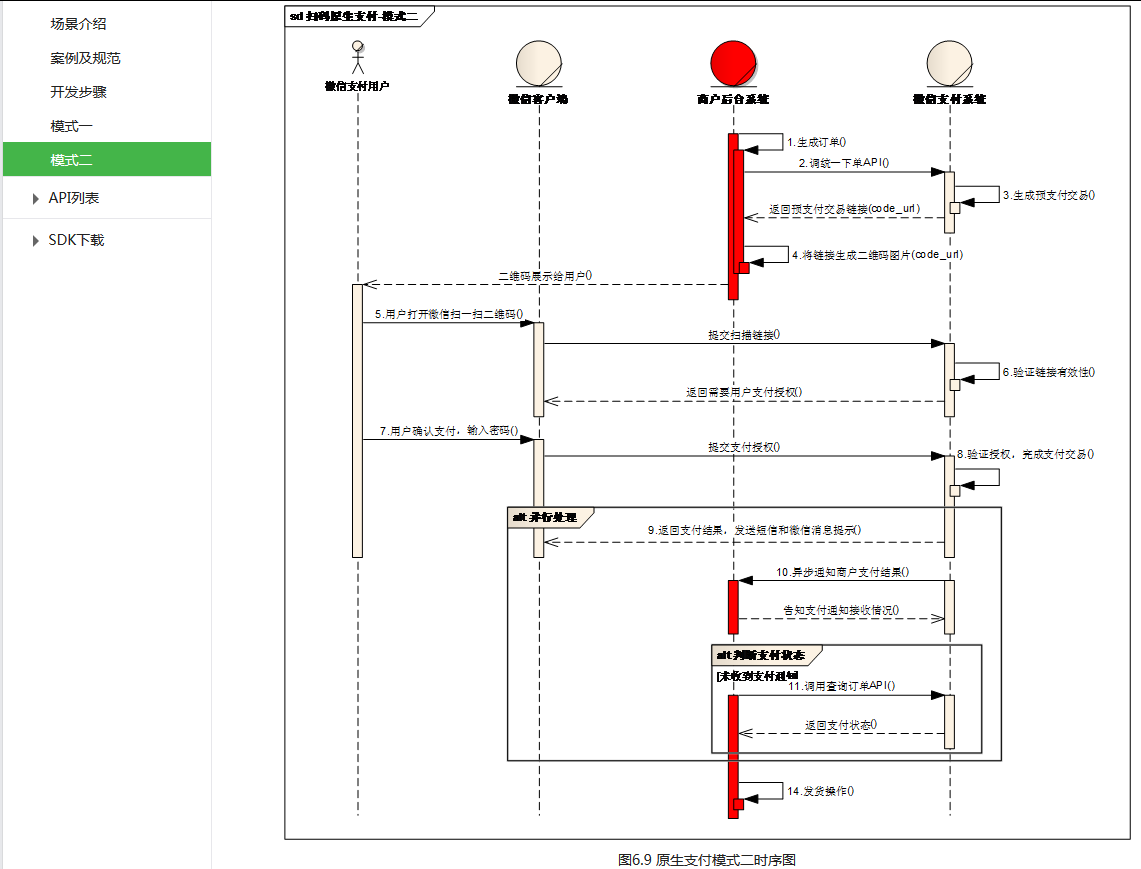
模式二,先生成訂單,再掃碼。
而 生成訂單,代表著 本次支付給商戶的金額是否是已經確定了。
在模式一中,用戶掃描的二維碼,此時可以還沒有確定實際要支付的金額。
在模式二中,用戶掃描的二維碼,金額已經是確定的。
可以這么理解,模式一中的二維碼,是商品的二維碼。
模式二中的二維碼,是 訂單的二維碼,也因為這個是訂單的二維碼,所以必須要有時效性。
那么這兩個場景的玩法,可以有一個明顯的差別,
模式一,更適合無人職守的自動售賣機。所有的商品都有一個固定的二維碼,價格相對穩定,當用戶使用微信支付掃描了二維碼,微信再請求自動售賣機的服務提供商的 后臺接口,注意,這個請求中,是包含了商品ID以及用戶信息的,這樣,商戶系統就可以根據 商品ID,以及用戶的身份,再來確定用戶實際要支付的金額。
模式二,更適合有人職守的,支付金額非常不確定的場合。比如,你去飯館吃飯,雖然每個菜的金額是固定的,但一桌子飯菜的金額不固定,甚至是你還可能使用飯館事先發放的代金券。這個時候,就需要收銀員,預先創建一個訂單,確定好金額,然后你再來掃描這個二維碼來支付。
當然,用模式二來實現無人值守的自動售賣機,也是可以的。只是這個自動售賣機的就要多承擔一些交互以及業務邏輯,在生成二維碼之前,創建訂單。
兩種模式,在支付的流程中,有一定的共同的流程:
1,生成訂單。
2,用戶支付。
差別在于:
模式一,先掃碼,再生成訂單。
模式二,先生成訂單,再掃碼。
而 生成訂單,代表著 本次支付給商戶的金額是否是已經確定了。
在模式一中,用戶掃描的二維碼,此時可以還沒有確定實際要支付的金額。
在模式二中,用戶掃描的二維碼,金額已經是確定的。
可以這么理解,模式一中的二維碼,是商品的二維碼。
模式二中的二維碼,是 訂單的二維碼,也因為這個是訂單的二維碼,所以必須要有時效性。
那么這兩個場景的玩法,可以有一個明顯的差別,
模式一,更適合無人職守的自動售賣機。所有的商品都有一個固定的二維碼,價格相對穩定,當用戶使用微信支付掃描了二維碼,微信再請求自動售賣機的服務提供商的 后臺接口,注意,這個請求中,是包含了商品ID以及用戶信息的,這樣,商戶系統就可以根據 商品ID,以及用戶的身份,再來確定用戶實際要支付的金額。
模式二,更適合有人職守的,支付金額非常不確定的場合。比如,你去飯館吃飯,雖然每個菜的金額是固定的,但一桌子飯菜的金額不固定,甚至是你還可能使用飯館事先發放的代金券。這個時候,就需要收銀員,預先創建一個訂單,確定好金額,然后你再來掃描這個二維碼來支付。
當然,用模式二來實現無人值守的自動售賣機,也是可以的。只是這個自動售賣機的就要多承擔一些交互以及業務邏輯,在生成二維碼之前,創建訂單。
?
?
?
https://pay.weixin.qq.com/wiki/doc/api/native.php?chapter=6_4
業務流程時序圖
?
?
?https://pay.weixin.qq.com/wiki/doc/api/native.php?chapter=6_5
業務流程時序圖
)
Ubuntu14中安裝GraphicsMagick)




性能對比 測試 。 Servlet的性能應該是最好的,可以做為參考基準,其它測試都要向它看齊,參照...)
--三種方案對比)





--結構光深度測距)





