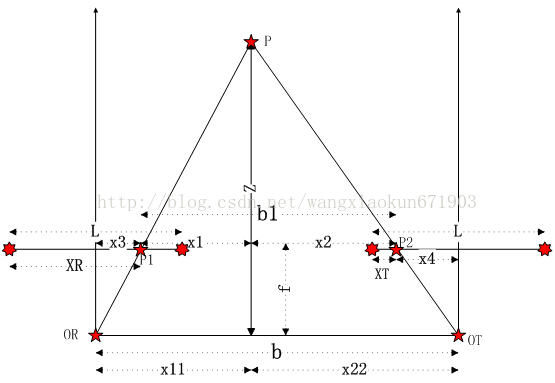
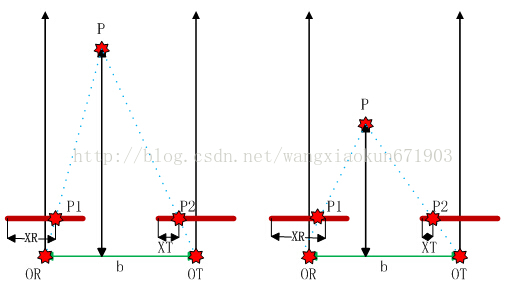
相機成像的模型如下圖所示:
? ? ? ? P為空間中的點,P1和P2是點P在左右像平面上的成像點,f是焦距,OR和OT是左右相機的光心。由下圖可見左右兩個相機的光軸是平行的。XR和XT是兩個成像點在左右兩個像面上距離圖像左邊緣的距離。
--------------------------------------------------------------------極線-------------------------------------------------------------------------------------

點P和Q,映射到左相機OR像面上的同一點p≡q,只要找到p和q在右相機OT像面上的對應點就可以通過三角計算估計深度。找到對應點的過程,即立體匹配。?
為了找到對應點,需要增加約束,最常用的是極線約束。?
P和Q映射到左相機QR像面上的同一點p≡q,直線pq上的點對應點一定位于右像面的直線p’q’上,p’q’即為直線pq的極線,這就是極線約束。?
---------------------------------------------------------------------極線end------------------------------------------------------------------------------------
? ? ?若兩個相機已經校正完成即達到極線平行,兩條光軸方向也平行。則視差和物體深度的關系式如下:
?
? ? ??
可推導到:
??
? ? ? ?證明過程:
? ? ? ?已知:
? ? ? ??
? ? ? ?由相似三角形原理:
? ? ? ? ??
?
? ? ?(1)+(2)有:
 ?(5)
?(5)? ? ? ?其中b1可以用b、XR和XT表示。

? ? ? ?可得(5)式變為(1)式:
?
?
?
?
?
?
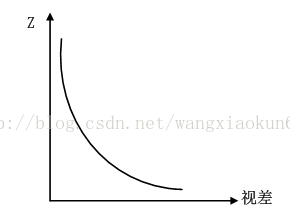
? ? ? 由上面兩幅圖,可知距離像面越近的點,它在左右相機中的視差越大,距離像面越遠的點,它在左右相機中的視差越小。
深度Z和視差的關系圖如下:





——單目攝像機標定參數說明)

)

)


)






