from:https://blog.csdn.net/linear_luo/article/details/52576082
1 經典ICP
ICP的目的很簡單,就是求解兩堆點云之間的變換關系。怎么做呢?思路很自然,既然不知道R和t(針對剛體運動),那我們就假設為未知量唄,然后通過某些方法求解。下面我們來看看具體怎么求的~沒辦法,要把問題描述清楚,數學是少不了的了。假設有兩堆點云,分別記為兩個集合X=x1,x2,...,xmX=x1,x2,...,xm和Y=y1,y2,...,ymY=y1,y2,...,ym(m并不總是等于n)。然后呢,我們不失一般性的,假設兩個點云之間的變換為R(旋轉變換)和t(平移變換),這兩個就是我們要求的東西啦~那我們將求解這個問題描述成最小化均方誤差:?
e(X,Y)=∑i=1m(Rxi+t?yi)2e(X,Y)=∑i=1m(Rxi+t?yi)2
經典的ICP方法對上面的優化問題的處理思路如下:?
(1)初始化RR?和?tt?
確定初始的RR?和?tt?的方法很多,如果什么方法都不知道,那隨便賦一個RR?和?tt?,然后就迭代的算呀。隨便給一個值從原理上來說也可以得到最終的一個結果呀,但是準不準就不知道了。相信有基本的優化概念的人都知道,初始值的選取很重要,如果初始值選的不好很容易收斂到一個局部最優解,然后局部最優解好不好那就另說了。ICP發展了這么多年了,當然有很多的方法來估計初始的R和t了,像PCL給的SampleConsensusInitalAlignment函數以及TransformationEstimationSVD函數都可以得到較好的初始估計。?
(2)迭代?
得到初始的估計后,接下來的步驟就順理成章了:對于XX中的每一個點用當前的RR?和?tt在YY中找最近的點(比如用歐式距離),然后這兩個點就成了一對了~就這樣,對所有的點都這么做一次,然后我們就得到了所有的匹配對了~然后呢,用每一對的坐標列一個方程,就得到一系列的方程。然后就求解最優的R和t最小化上面的誤差。如此循環往復。
?
2 ICP變種
除了經典的ICP方法外,還有一些變種,如point-to-point的,point-to-plane的以及plane-to-plane的,那么這三種方法到底是啥呢??
其實很簡單,就是上面的誤差函數的定義不一樣而已。在上面講經典ICP的時候,求和的每一項不就是XX中的每一個點到YY中的每一個點的距離嗎?那就是point-to-point了,那么將求和的每一項變成XX中的每一個點到YY中的平面的距離,那就是point-to-plane了呀~類似的,如果把求和的每一項變成X中的平面到YY中的平面的距離,那就是plane-to-plane了。我們說了這么久的平面,那么平面到時是怎么定義的呢??
point-to-plane的誤差函數定義為:Mopt=argminR,t∑i((R?xi+t?yi)?ni)Mopt=argminR,t∑i((R?xi+t?yi)?ni)
參考:http://www.cnblogs.com/jian-li/articles/4945676.html
-------------------------------------------------------------------------------------------------------------------------------------------
圖像配準是圖像處理研究領域中的一個典型問題和技術難點,其目的在于比較或融合針對同一對象在不同條件下獲取的圖像,例如圖像會來自不同的采集設備,取自不同的時間,不同的拍攝視角等等,有時也需要用到針對不同對象的圖像配準問題。具體地說,對于一組圖像數據集中的兩幅圖像,通過尋找一種空間變換把一幅圖像映射到另一幅圖像,使得兩圖中對應于空間同一位置的點一一對應起來,從而達到信息融合的目的。?一個經典的應用是場景的重建,比如說一張茶幾上擺了很多杯具,用深度攝像機進行場景的掃描,通常不可能通過一次采集就將場景中的物體全部掃描完成,只能是獲取場景不同角度的點云,然后將這些點云融合在一起,獲得一個完整的場景。
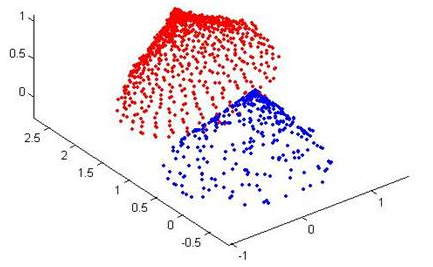
ICP(Iterative Closest Point迭代最近點)算法是一種點集對點集配準方法。如下圖所示,PR(紅色點云)和RB(藍色點云)是兩個點集,該算法就是計算怎么把PB平移旋轉,使PB和PR盡量重疊。
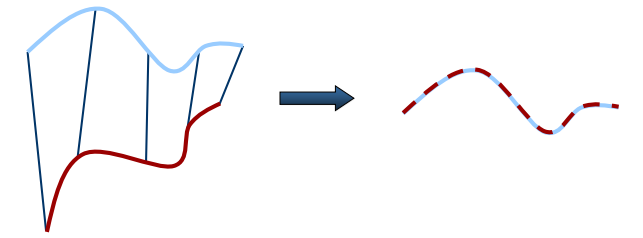
用數學語言描述如下,即ICP算法的實質是基于最小二乘法的最優匹配,它重復進行“確定對應關系的點集→計算最優剛體變換”的過程,直到某個表示正確匹配的收斂準則得到滿足。
ICP算法基本思想:
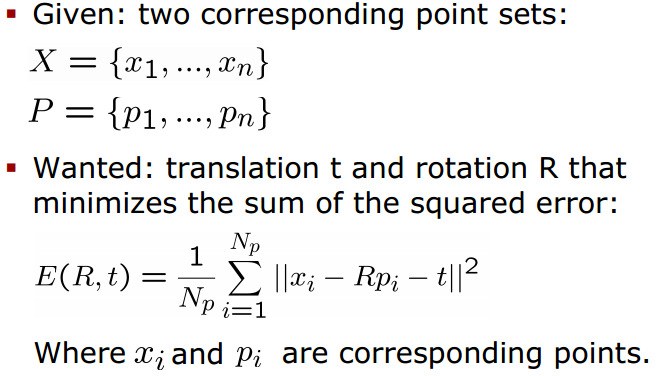
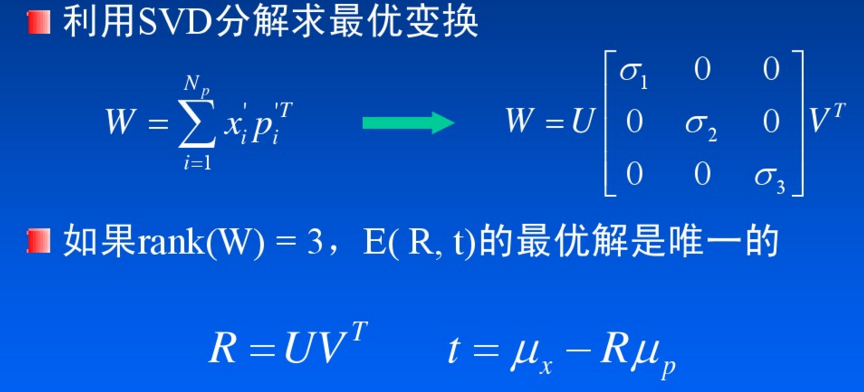
如果知道正確的點對應,那么兩個點集之間的相對變換(旋轉、平移)就可以求得封閉解。
首先計算兩個點集X和P的質心,分別為μx和μp

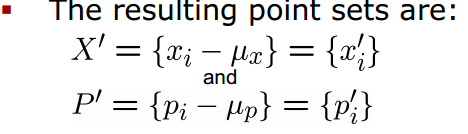
然后在兩個點集中分別減去對應的質心(Subtract the corresponding center of mass?from every point in the two point sets?before calculating the transformation)
目標函數E(R,t)的優化是ICP算法的最后一個階段。在求得目標函數后,采用什么樣的方法來使其收斂到最小,也是一個比較重要的問題。求解方法有基于奇異值分解的方法、四元數方法等。?
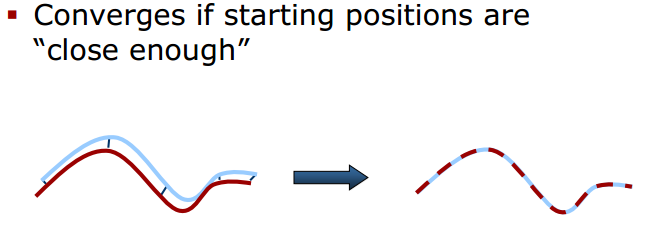
如果初始點“足夠近”,可以保證收斂性
ICP算法優點:
- 可以獲得非常精確的配準效果
- 不必對處理的點集進行分割和特征提取
- 在較好的初值情況下,可以得到很好的算法收斂性
ICP算法的不足之處:?
- 在搜索對應點的過程中,計算量非常大,這是傳統ICP算法的瓶頸
- 標準ICP算法中尋找對應點時,認為歐氏距離最近的點就是對應點。這種假設有不合理之處,會產生一定數量的錯誤對應點
針對標準ICP算法的不足之處,許多研究者提出ICP算法的各種改進版本,主要涉及如下所示的6個方面。

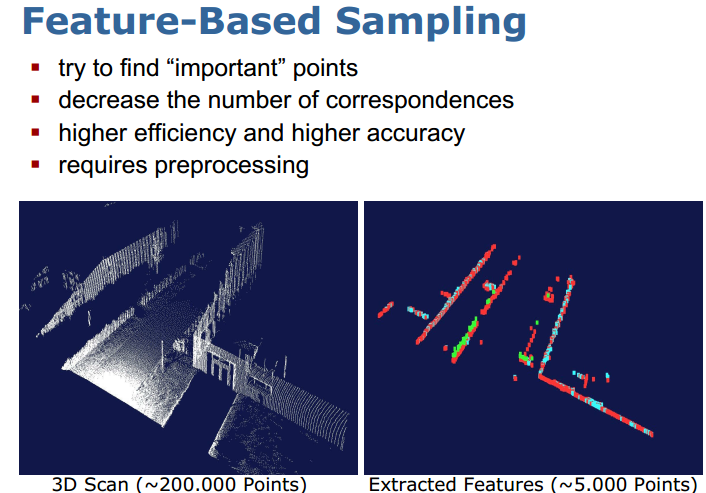
標準ICP算法中,選用點集中所有的點來計算對應點,通常用于配準的點集元素數量都是非常巨大的,通過這些點集來計算,所消耗的時間很長。在后來的研究中,提出了各種方法來選擇配準元素,這些方法的主要目的都是為了減小點集元素的數目,即如何選用最少的點來表征原始點集的全部特征信息。在點集選取時可以:1.選取所有點;2.均勻采樣(Uniform sub-sampling?);3.隨機采樣(Random sampling);4.按特征采樣(Feature based Sampling );5.法向空間均勻采樣(Normal-space sampling),如下圖所示,法向采樣保證了法向上的連續性(Ensure that samples have normals distributed as?uniformly as possible)

基于特征的采樣使用一些具有明顯特征的點集來進行配準,大量減少了對應點的數目。
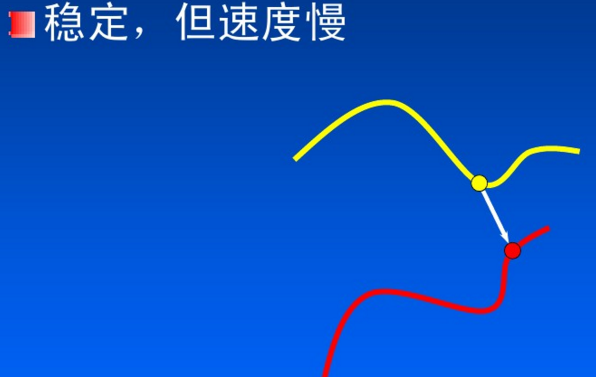
點集匹配上有:最近鄰點(Closet Point)
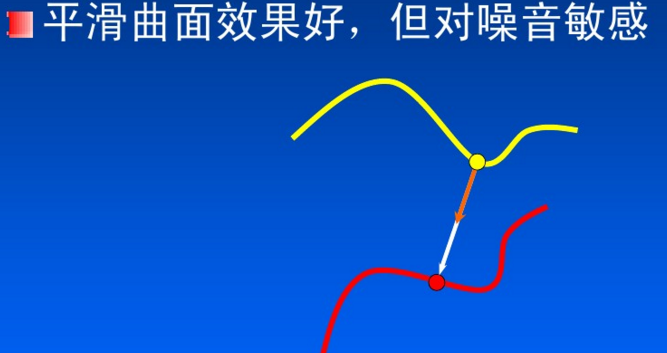
 法方向最近鄰點(Normal Shooting)
法方向最近鄰點(Normal Shooting)
投影法(Projection)
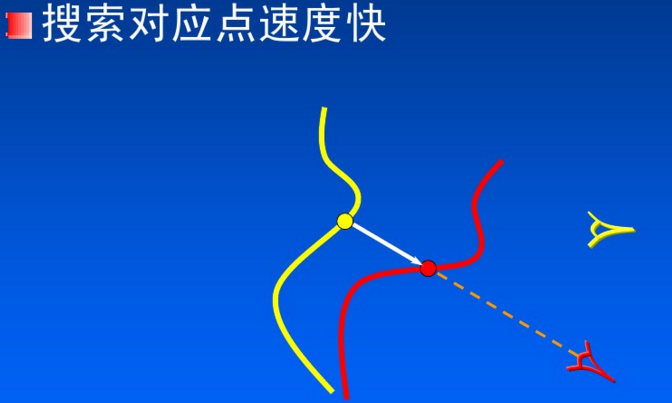











)






)
