1、給硬盤分區
現在小伙伴們對于給電腦硬盤分區想必比較頭疼,給電腦硬盤分區分為兩種情況,一是在安裝系統之前給系統硬盤分區,二是在安裝系統之后給硬盤分區,我們現在購買的品牌機和筆記本的用戶比較多,而且筆記本和品牌機在買回來后只要簡單的釋放下系統就好,完成釋系統之后,我們發現我們的計算機里面只有一個C盤,那么想再分出幾個盤如何操作呢,現在小編就手把手教你如何給自己的電腦進行分區,希望能給不懂如何分區的小伙伴們帶來幫助。
為什么要進行分區和格式化?
一般來說,新硬盤是需要經過低格式化-分區-高級格式化等過程,這樣才可以用來存放信息。但是我們購買的新硬盤在出廠前,硬盤銷售商一鍵對硬盤做好了低級格式化的操作了,所以我們在使用之前需要對硬盤分區和格式化。
注意:在硬盤分區之前你需要先了解一些基礎知識:由于電腦目前常見的分區格式是GPT和MBR兩種類型,他們對應的啟動模式分區是對應UEFI和Legacy。一般來說,新主板都是默認UEFI+GPT的模式,因為GPT分區可支持2TB以上的大硬盤,而這些格式對win7 64位/win8 64位/win10 64位等系統的功能支持也比較完善,能更好的快速安全啟動。而一些舊電腦可能支持的Legacy+MBR。所以自己重裝系統或者重新分區要了解清楚,不要出現Legacy+GPT或UEFI+MBR這種混搭錯誤哦。另外,在分區前,對于一些重要的數據,您可以使用免費的備份軟件:輕松備份來備份, 它支持備份系統、磁盤、分區、文件、定時備份等等。
操作步驟
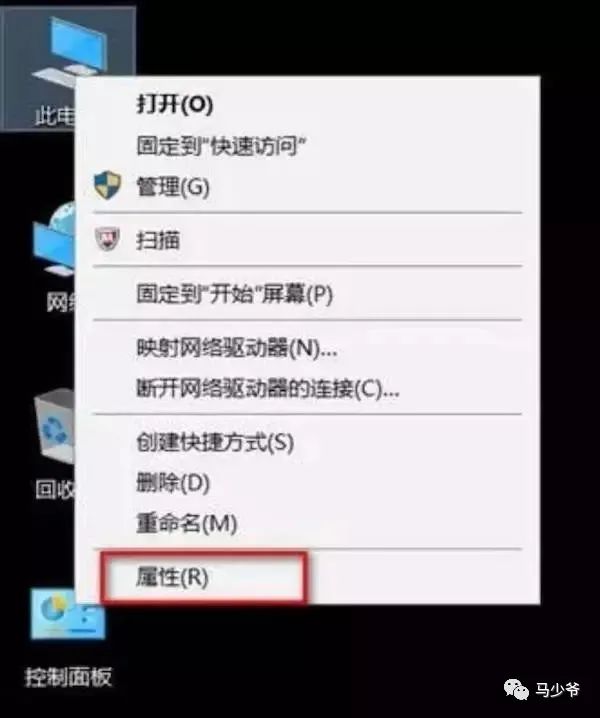
1.在桌面上點擊“此電腦”右鍵,打開屬性。
2.打開“系統保護”,有時候系統保護C盤數據導致分區失敗,所以先關閉掉。

3.點擊配置,選擇禁用系統保護。
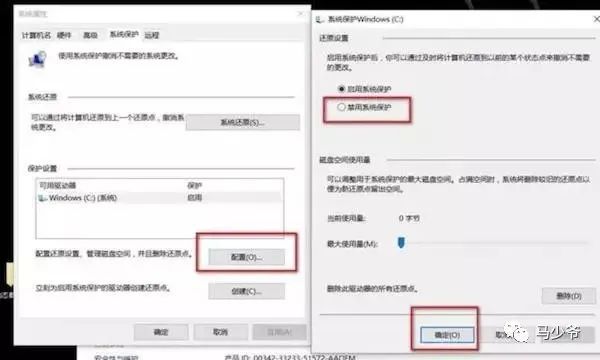
4.確定關閉系統保護。

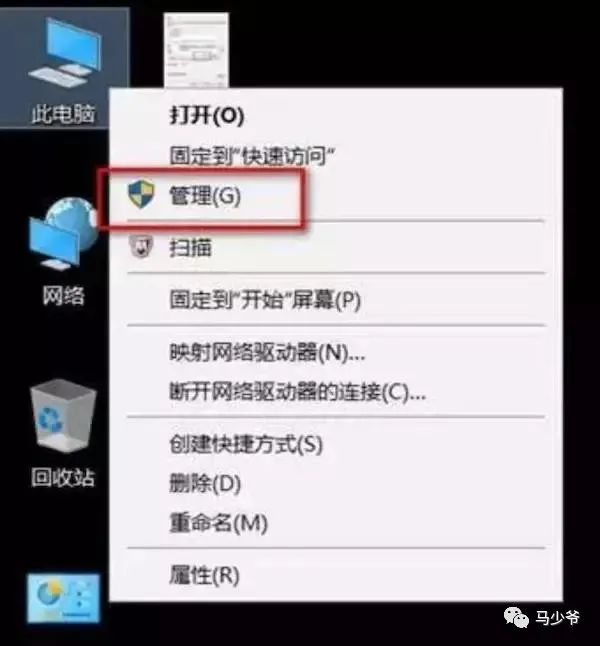
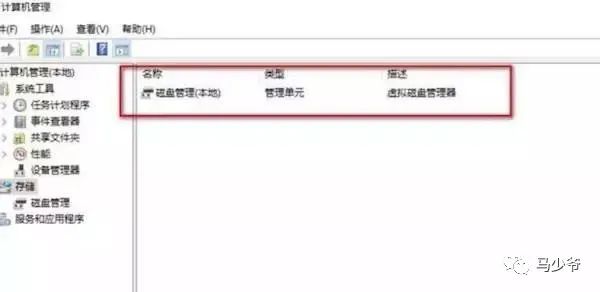
5.回到桌面,點擊“此電腦”右鍵,選擇管理。
6.點擊存儲。
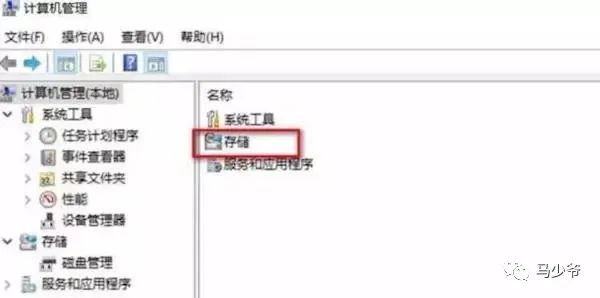
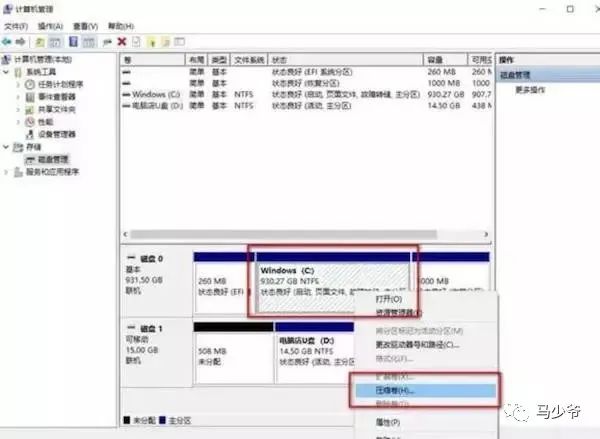
7.點擊磁盤管理,打開系統硬盤管理器。
8.這時候在未分區上的C盤上點擊右鍵,選擇壓縮卷。
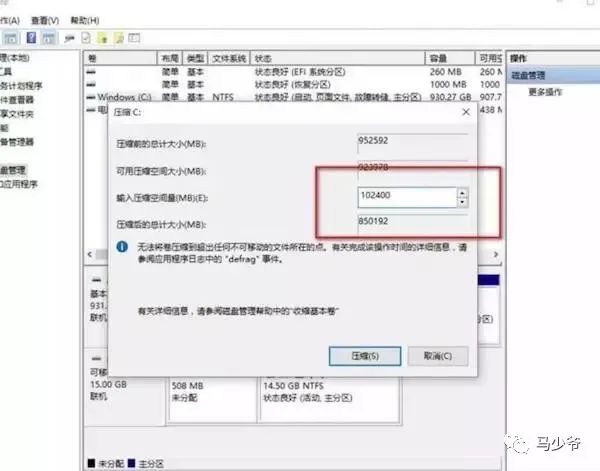
9.輸入壓縮量,比如,我們先輸入102400MB,也就是100GB。
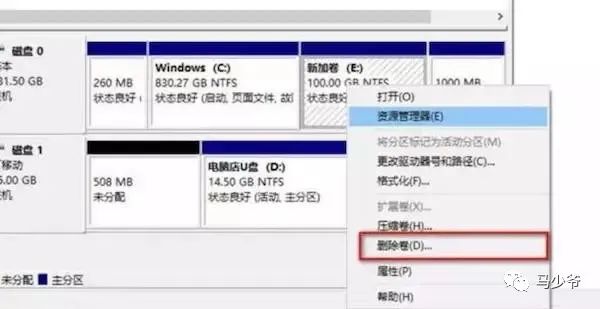
10.壓縮結束后的空間就是未分配的,點擊右鍵選擇新建簡單卷。
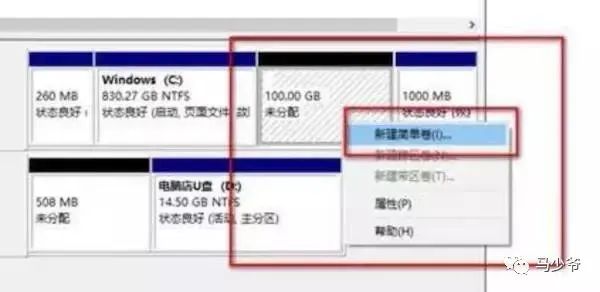
這樣以此類推把剩下的空間分成你需要的磁盤空間就可以了,如果你發現把想分的空間數量寫錯了,或者需要重新分盤,那么就在需要修改的分區上面右鍵點擊刪除卷,然后上面步驟重新再分就ok了。
以上是小編今天為大家分享的硬盤分區步驟,有電腦故障,電腦組裝等方面的朋友,我們可以一起交流探討。

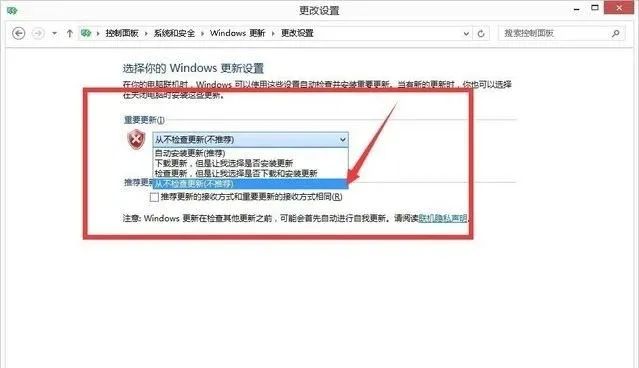
2、安裝bandzip解壓縮軟件并設置電腦不自動更新
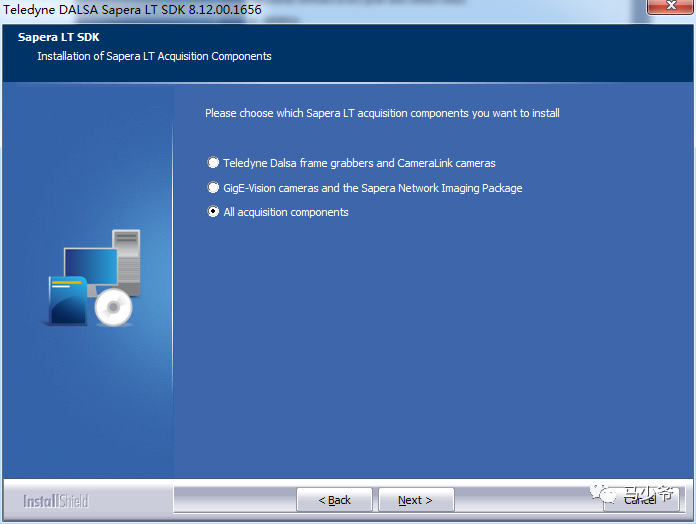
3、安裝相機驅動


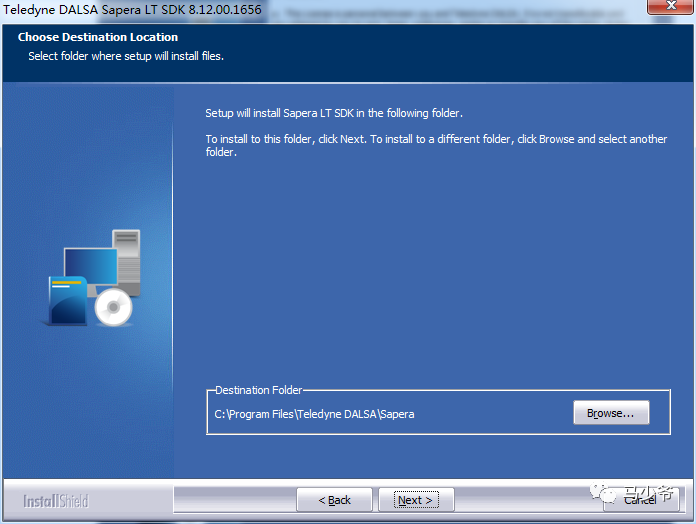
安裝相機軟件以后重啟電腦。
4、安裝VS2013
需要安裝IE10
使用IE10安裝包,安裝IE10:

安裝成功后,重啟電腦,完成整個安裝流程。
重啟后繼續安裝VS2013
測試程序如下:
#include #include using namespace std;int main(){ printf("hello!\n"); cout << "nihao" << endl; system("pause"); return 0;}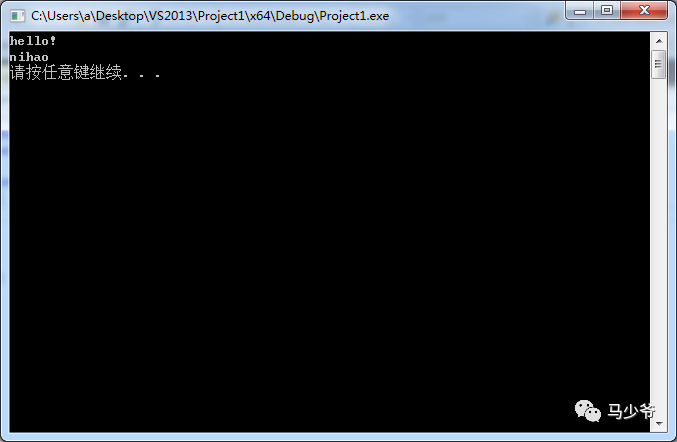
安裝CSC中文版
安裝完畢

5、安裝搜狗拼音輸入法以及Chrome瀏覽器
6、配置OpenCV2.4.10
6.1、開發環境
1、操作系統:Windows 7(64位)
2、編程環境:Microsoft Visual Studio 2013
3、OpenCV版本:2.4.10
6.2、安裝OpenCV2.4.10
1、下載OpenCV2.4.10 SDK:官網鏈接
http://sourceforge.net/projects/opencvlibrary/files/opencv-win/2.4.10/opencv-2.4.10.exe/download
2、安裝OpenCV:直接點擊opencv-2.4.10發現,OpenCV的安裝不過就是一個解壓過程,開始界面如下圖1所示:

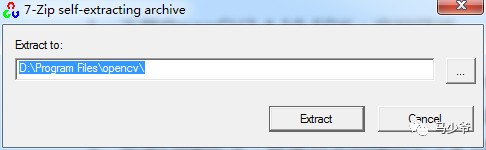
這里選擇安裝目錄為D:\Program Files,可以根據自己的習慣設置,這里推薦使用此目錄。點擊"Extract"即可出現解壓界面,直至解壓結束。
6.3、系統環境變量設置
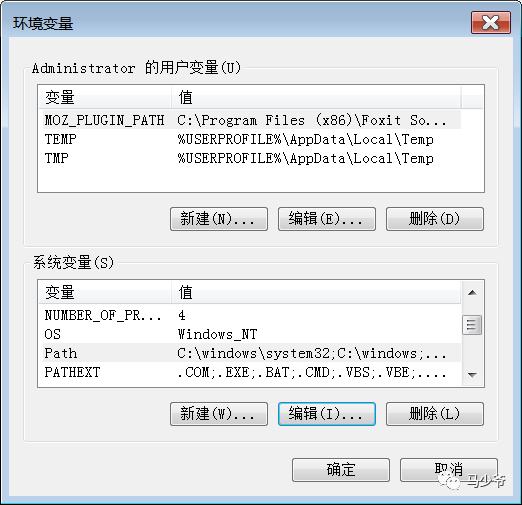
1、桌面右鍵點擊“計算機“,選擇”屬性 -- 高級系統設置 -- 高級 -- 環境變量“;
2、系統變量中選擇"Path",雙擊打開或者單擊下面的編輯;
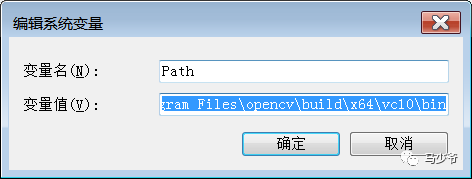
3、在彈出的”編輯系統變量“中添加如下目錄:
D:\Program Files\opencv\build\x86\vc12\bin
D:\Program Files\opencv\build\x64\vc12\bin
對于64位系統,填寫上面兩個目錄,而32位系統只需要填寫第一個目錄即可。這里自己使用的是64位系統,因此添加兩個目錄,如下圖2所示:
此處,D:\Program Files\為安裝目錄,如果你把OpenCV安裝到其他目錄的話,請相應調整。
此處應該注銷一下計算機或者重新啟動,以使上面設置的環境變量有效。
6.4、VS2010配置
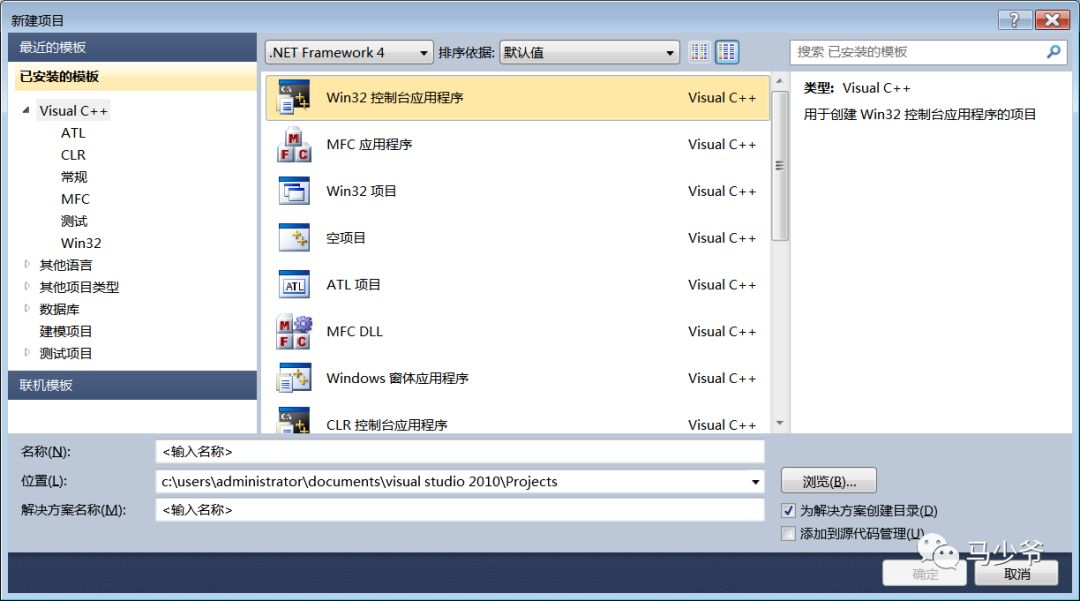
6.4.1、新建項目
打開VS2010,新建一個32位控制臺程序,可以選擇空白文檔,也可以選擇已經添加了預編譯的項目;
6.4.2、添加工程包含目錄
1)在剛剛建立的項目中選擇”視圖 -- 屬性管理器“,左側出現屬性管理器頁面;
2)選擇”項目->Debug|Win32->Microsoft.Cpp.Win32.user“,雙擊或者右鍵選擇”屬性“;如圖3所示
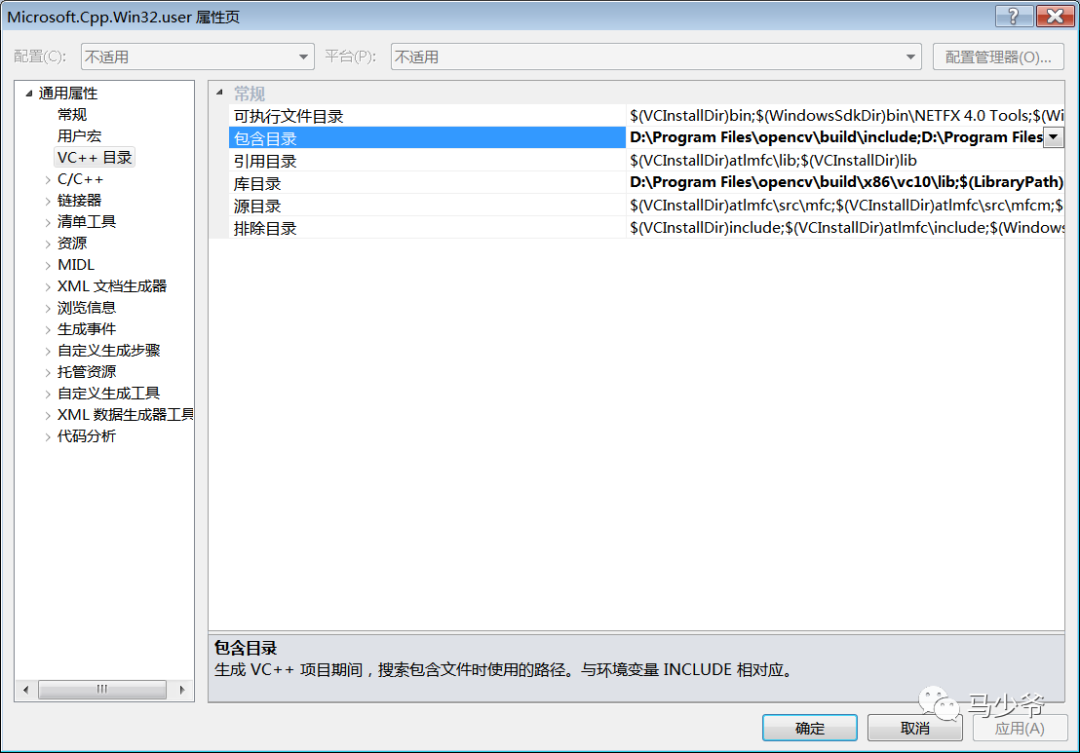
圖3 屬性設置
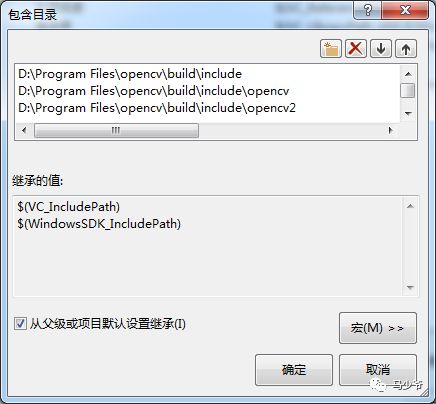
3)選擇”通用屬性 --- VC++目錄 --- 包含目錄“,添加如下三個目錄:
D:\Program Files\opencv\build\include
D:\Program Files\opencv\build\include\opencv
D:\Program Files\opencv\build\include\opencv2
6.4.3、添加工程庫目錄
1)同2.1和2.2方法一樣,彈出如圖3的界面;
2)選擇”通用屬性 --- VC++目錄 --- 庫目錄“;
3)添加:D:\Program Files\opencv\build\x64\vc12\lib
6.4.4、鏈接庫設置
1)在剛剛建立的項目中選擇”視圖 -- 屬性管理器“,左側出現屬性管理器頁面;
2)選擇”項目->Debug|Win32->Microsoft.Cpp.Win32.user“,雙擊或者右鍵選擇”屬性“,如圖3所示;
3)選擇”通用屬性 --- 鏈接器 --- 輸入 --- 附加的依賴項“,添加如下lib庫目錄:
opencv_calib3d2410d.libopencv_contrib2410d.libopencv_core2410d.libopencv_features2d2410d.libopencv_flann2410d.libopencv_gpu2410d.libopencv_highgui2410d.libopencv_imgproc2410d.libopencv_legacy2410d.libopencv_ml2410d.libopencv_nonfree2410d.libopencv_objdetect2410d.libopencv_ocl2410d.libopencv_photo2410d.libopencv_stitching2410d.libopencv_superres2410d.libopencv_ts2410d.libopencv_video2410d.libopencv_videostab2410d.libopencv_calib3d2410.libopencv_contrib2410.libopencv_core2410.libopencv_features2d2410.libopencv_flann2410.libopencv_gpu2410.libopencv_highgui2410.libopencv_imgproc2410.libopencv_legacy2410.libopencv_ml2410.libopencv_nonfree2410.libopencv_objdetect2410.libopencv_ocl2410.libopencv_photo2410.libopencv_stitching2410.libopencv_superres2410.libopencv_ts2410.libopencv_video2410.libopencv_videostab2410.lib以上lib庫即為D:\Program Files\opencv\build\x86\vc10\lib目錄下的所有庫文件,其中d結尾的為debug模式庫,而沒有d結尾的為release模式庫。
設置完成后,點擊”確定“完成配置。這種方法可以在以后的新建項目中依然有效,也可以自己新建一個屬性文件,即”屬性管理器“中,右擊”Debug| Win32“
6.4.5、測試
1、測試圖如圖4所示,右鍵另存為保持名稱為pic.jpg;

圖4 ?測試用圖
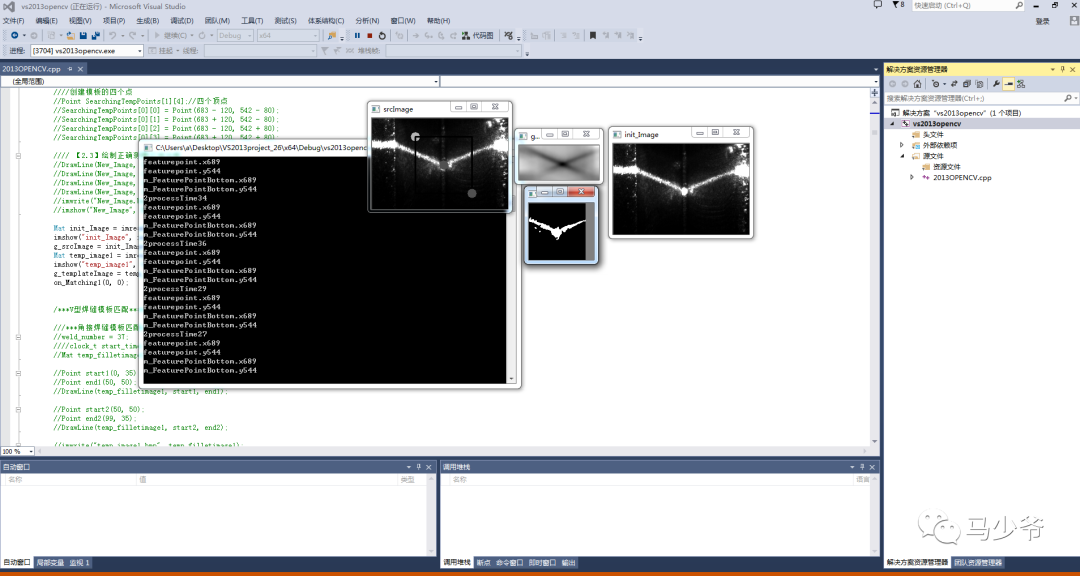
將上圖放置在工程目錄中(和cpp源文件同一路徑),編輯如下程序:
// main.cpp: 主程序入口#include using namespace cv; void main(void){ Mat img = imread("pic.jpg"); namedWindow("公眾號:馬少爺"); imshow("公眾號:馬少爺",img); waitKey(6666);}在VS中點擊運行,配置成功地話得到一個控制臺窗口和一張圖片窗口如下圖所示:

更換程序測試
至此,程序安裝成功,可以進行接下來的編程工作。
7、安裝Eigen
首先,在Eigen官網下載Eigen:
Eigen
http://eigen.tuxfamily.org/index.php?title=Main_Page
其次,解壓文件到當前文件夾,解壓完成后重命名為eigen3(這個看個人喜好,我是為了看著舒服)然后把這個eigen3文件夾復制到你想放的位置,也可以不移動。
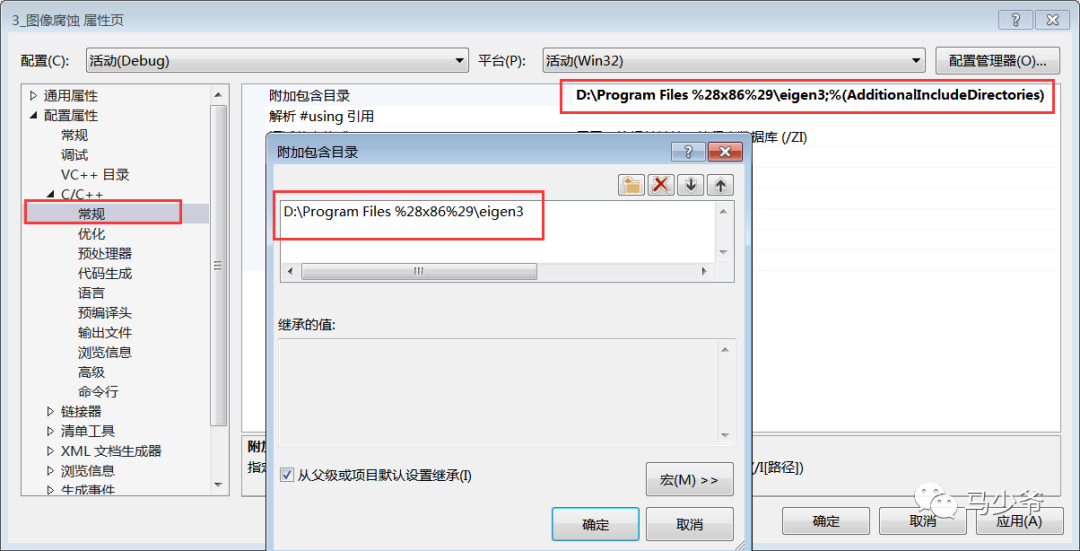
然后,打開vs2013,可以新建一個項目,也可以打開以前的項目,右鍵項目名,選擇屬性,在c/c++附加目錄里加入eigen3文件夾的路徑。
測試一下
#include //頭文件#include #include #include using namespace std;using namespace cv; //包含cv命名空間using namespace Eigen;Mat eulerAnglesToRotationMatrix(Vec3d &theta);const float PI = 3.14159;int main(){ ?//使用Mat 構造函數 ?Mat M(2, 2, CV_8UC3, Scalar(0, 0, 255)); ?cout << "M = " << endl << " " << M << endl << endl; ?//C++構造 ?int sz[3] = { 2, 2, 2 }; ?Mat L(3, sz, CV_8UC3, Scalar::all(0)); ?//使用create()函數 ?M.create(4, 4, CV_8UC(2)); ?cout << "M = " << endl << " " << M << endl << endl; ?Mat E = Mat::eye(4, 4, CV_64F); ?cout << "E = " << endl << " " << E << endl << endl; ?// 【1】讀入一張圖片 ?Mat img = imread("1.jpg"); ?// 【2】在窗口中顯示載入的圖片 ?imshow("【載入的圖片】", img); ?// 【3】等待6000 ms后窗口自動關閉 ?Mat R; ?Vec3d eular(123 * ?PI/ 180, 45 * PI / 180, 126 * PI / 180); ?R = eulerAnglesToRotationMatrix(eular); ?cout << "R = " << endl << " " << R << endl << endl; ?Matrix2d a; ?a << 1, 2, ? ?3, 4; ?MatrixXd b(2, 2); ?b << 2, 3, ? ?1, 4; ?cout << "a + b =" << a + b << endl; ?cout << "a - b =" << a - b << endl; ?cout << "Doing a += b;" << endl; ?a += b; ?cout << "Now a =" << a << endl; ?cout << "a^T= ?" << a.transpose() << endl; ?cout << "a*b= " << a*b << endl; ?Vector3d v(1, 2, 3); ?Vector3d w(1, 0, 0); ?cout << "-v + w - v =" << -v + w - v << endl; ?cout << v << endl; ?cout << v.transpose() << endl; ?//system("pause"); ?waitKey(0);}Mat eulerAnglesToRotationMatrix(Vec3d &theta){ ? ? ?// 計算旋轉矩陣的X分量 ? ? ?Mat R_x = (Mat_<double>(3, 3) << ? ?1, 0, 0, ? ?0, cos(theta[0]), -sin(theta[0]), ? ?0, sin(theta[0]), cos(theta[0]) ? ?); ? ?// 計算旋轉矩陣的Y分量 ? ?Mat R_y = (Mat_<double>(3, 3) << ? ?cos(theta[1]), 0, sin(theta[1]), ? ?0, 1, 0, ? ?-sin(theta[1]), 0, cos(theta[1]) ? ?); ? ?// 計算旋轉矩陣的Z分量 ? ?Mat R_z = (Mat_<double>(3, 3) << ? ?cos(theta[2]), -sin(theta[2]), 0, ? ?sin(theta[2]), cos(theta[2]), 0, ? ?0, 0, 1); ? ?Mat R = R_z * R_y * R_x; ? ? ?return R;}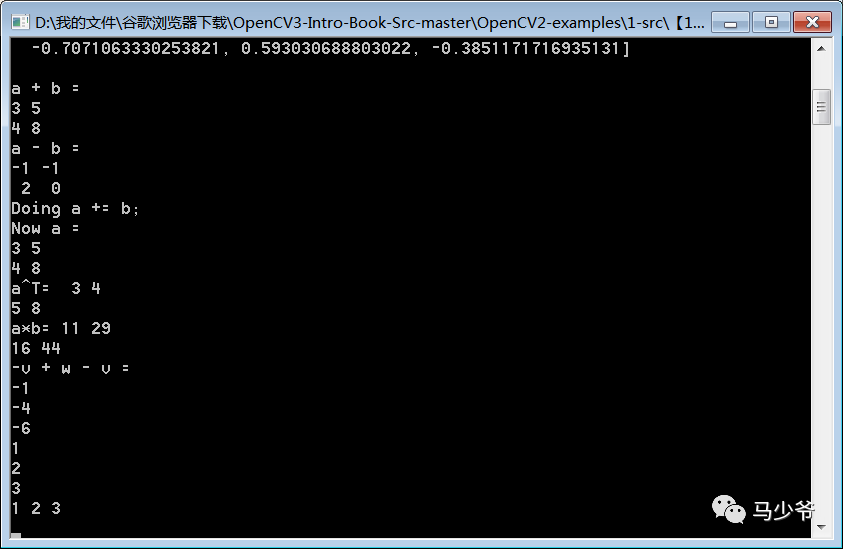
8、測試程序
8.1 問題1

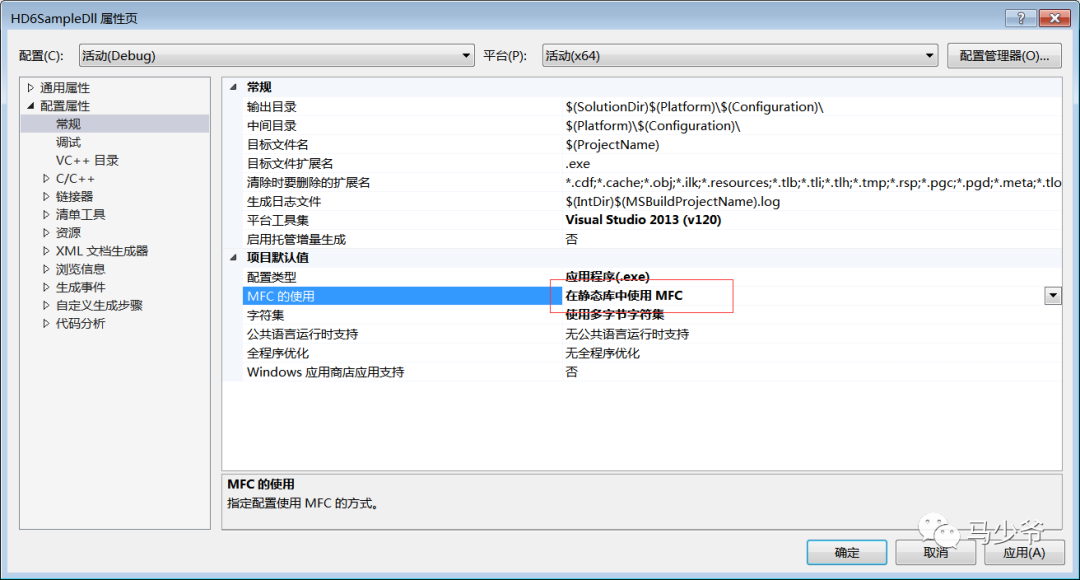
解決:vs2013 錯誤 1 error MSB8031: Building an MFC project for a non-Unicode character set is deprecated.
問題翻譯:用于多字節字符編碼 (MBCS) 的 MFC 庫 (DLL) 不再包含于 Visual Studio 中,但是可用作插件,您可以在任何裝有 Visual Studio Professional、Visual Studio Premium 或 Visual Studio Ultimate 的計算機上下載和安裝。(在 Visual Studio 中,必須啟用 MFC。)安裝需要大約 440 MB 磁盤空間,包括英語(美國)和 DLL 的本地化版本。問題根源:VS2013缺少MFC MBCS DLL加載項。其中MBCS為多字節字符編碼。解決方案:點擊下載鏈接下載Multibyte MFC Library for Visual Studio 2013,安裝即可,安裝過程關掉vs。
https://www.microsoft.com/zh-CN/download/confirmation.aspx?id=40770
注意:若安裝未成功,可嘗試以管理員身份進行安裝。

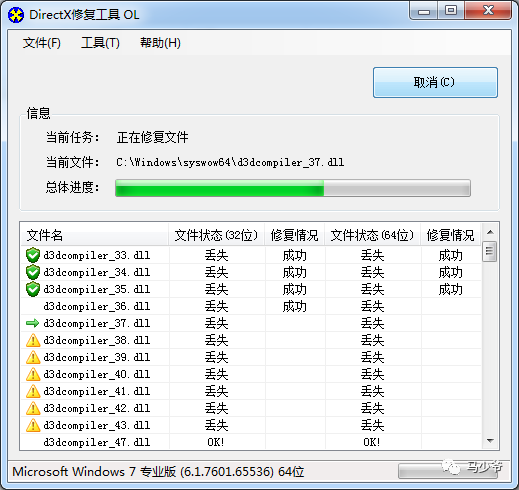
8.2 exe無法生成,缺少dll庫

總結:
安裝的軟件及順序如下:
1、關閉計算機防火墻,設置從來不檢查更新。
2、安裝BANDZIP解壓縮文件,使系統可以解壓opencv及VS2013安裝包。
3、在D盤新建Program Files和Program Files (x86)兩個文件夾,其中opencv安裝包放置在Program Files中,Eigen包放在Program Files?(x86)中。
4、安裝搜狗拼音輸入法軟件
5、安裝Chrome瀏覽器軟件
6、安裝Sapera_LT攝像頭驅動軟件
7、安裝VS2013軟件,按照本文介紹的順序依次設置OpenCV、Eigen。
8、測試成功以后,安裝VC_MBCSMFC程序
9、至此,成功運行以后整個程序運行成功。
推薦:機器人實時糾偏系統(一)
機器人實時糾偏(二)OpenCV+VS開發環境配置(三)結構光視覺的焊接機器人糾偏(四)結構光視覺的機器人焊接(五)結構光視覺的機器人焊接(六)機器人初始點導引(七)MATLAB標定相機參數(八)機器人的手眼標定(九)機器人坐標獲取(十)機器人調試(十一)TCP/IP客戶端API編程(十二)結構光傳感器上位機界面多線程編程(十三)TCP&UDP(十四)C/C++ Programing(十五)機器人掃描與跟蹤調試(十六)結構光傳感器庫函數(十七)結構光傳感器編程(十八)C/C++ Programing(十九)C/C++ Programing(二十)結構光傳感器編程(二十一)DX200操作要領(二十二)DX200操作要領(二十三)工裝軸協調(二十四)無夾具協調(二十五)圖像處理調試(二十六)STM32MODBUS_CRC編程(二十七)在C++中調用Matlab函數(二十八)
機器人手眼標定MATLAB及C++實現
機器人位姿運算及Eigen的使用(三十)
OpenCV與Eigen矩陣運算(三十一)
VS中數據讀寫及OpenCV擬合(三十二)
VS2013配置OpenGL庫(三十三)
曲線擬合/插值(三十四)
曲線擬合繪制濾波及機器人平移(三十五)
DX200操作要領—示教1(三十六)
直接打開與平移變換(三十七)PAM與鏡像平移變換(三十八)
修改與編輯程序(三十九)
YRC1000 宏程序命令(四十)
程序編輯與試運行(四十一)
程序編輯與再現(四十二)
再現(四十三)
程序管理(四十四)
便捷功能(四十五)
便捷功能(四十六)
橢圓擬合(四十七)
RANSAC直線擬合(四十八)
讀寫CSV文件類(四十九)
RANSAC直線擬合(五十)
法向量、旋轉矩陣計算(五十一)
機器人手眼標定與變量設置調試(五十二)
20200715調試記錄(五十三)
20200717調試記錄(五十四)
C++~RANSAC擬合圓/隨機數產生(五十五)
安川機器人外部軸協調(五十六)
安川機器人Motoplus編程(五十七)
安川機器人Motoplus編程(五十八)
安川機器人Motoplus編程(五十九)
安川機器人Motoplus編程(六十)
安川機器人Motoplus編程(六十一)
機器人調試(六十二)
機器人調試(六十三)
機器人調試(六十四)
機器人調試(六十五)
機器人調試(六十六)
機器人調試(六十七)
高斯卷積的可分離性(六十八)
機器人曲線焊縫識別及軌跡規劃研究(六十九)
安川機器人同步設置與檢驗(七十)
















-誤導人的水題。。。)



