1.
鼠標左鍵按下選擇起點,拖動鼠標,左鍵放開,確定終點。
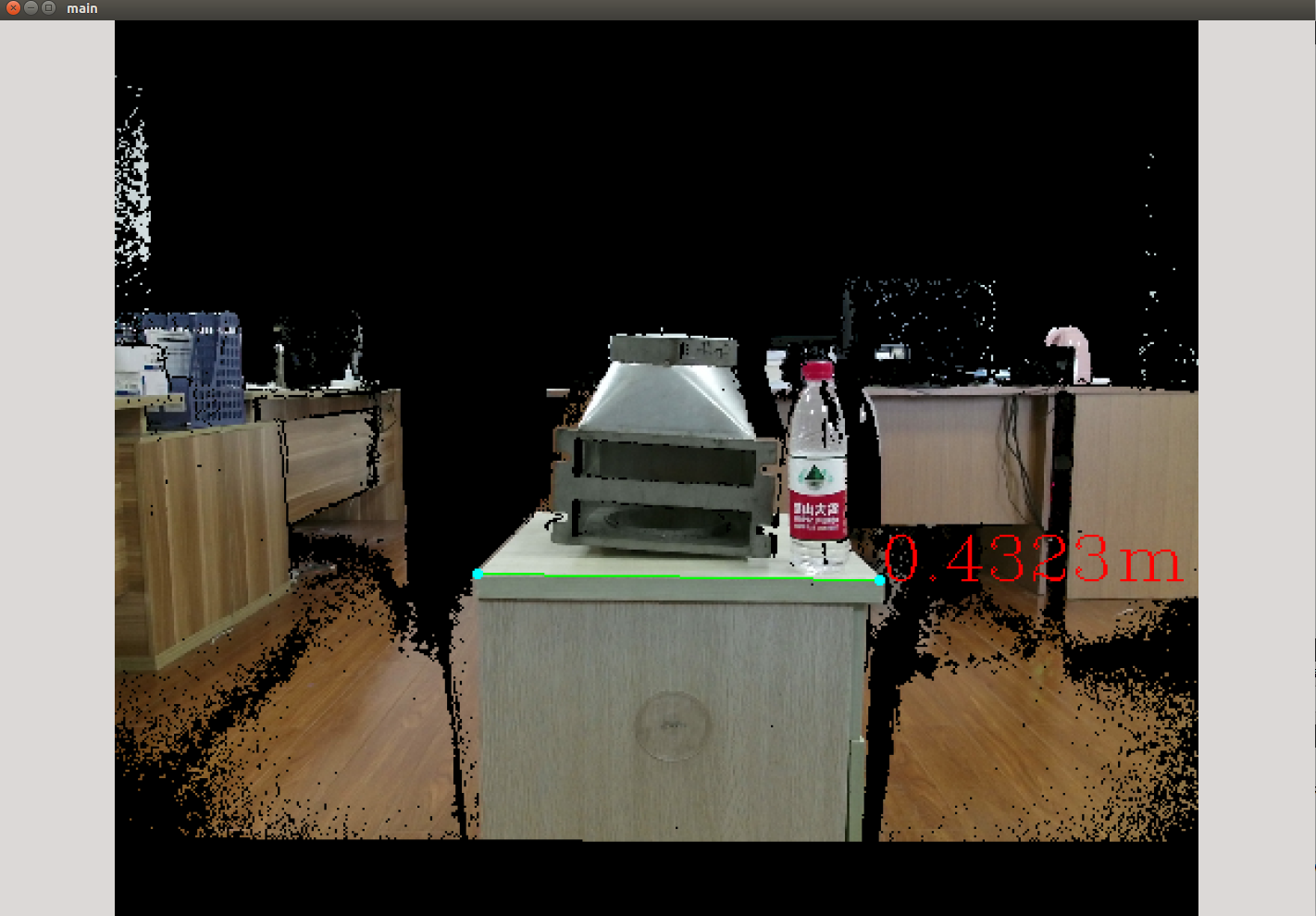
實現效果1

實現效果2
2.
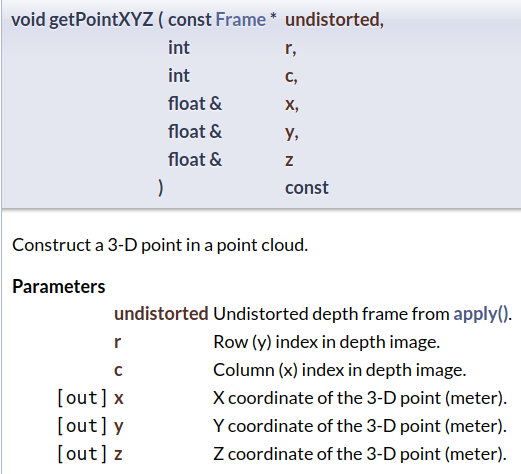
在linux下使用libfreenect2開源多平臺驅動來獲取kinect2.0的傳感器信息,得到深度信息,并通過libfreenect2提供的getPointXYZ函數,來得到相機坐標系中某一點的空間坐標。
3.
運用鼠標操作函數(setMouseCallback),來獲取畫面中的兩個點,并用直線將他們連接起來,通過(2)中的方法得到兩點的空間坐標:A(x1,y1,z1),B(x2,y2,z2)。通過簡單計算,便可以求得兩點的實際距離。
4.
關鍵代碼:
while(!protonect_shutdown){listener.waitForNewFrame(frames);libfreenect2::Frame *rgb = frames[libfreenect2::Frame::Color];libfreenect2::Frame *depth = frames[libfreenect2::Frame::Depth];cv::Mat(rgb->height, rgb->width, CV_8UC4, rgb->data).copyTo(rgbmat);cv::Mat(depth->height, depth->width, CV_32FC1, depth->data).copyTo(depthmat);cv::Mat(registered.height, registered.width, CV_8UC4, registered.data).copyTo(rgbd);registration->apply(rgb, depth, &undistorted, ®istered, true, &depth2rgb);cv::Mat(registered.height, registered.width, CV_8UC4, registered.data).copyTo(rgbd);//resize(rgbmat, dst1, Size(), c, d, INTER_NEAREST);inRange(depthmat,Scalar(a),Scalar(b),dst);//morphologyEx(dst,dst,MORPH_OPEN,kernel);findContours(dst,contours,hireachy,RETR_EXTERNAL,CHAIN_APPROX_SIMPLE,Point(0,0));if (contours.size() > 0){double maxArea=0;for (int i = 0; i < contours.size(); i++){double area = contourArea(contours[static_cast<int>(i)]);if (area > maxArea){maxArea = area;rect = boundingRect(contours[static_cast<int>(i)]);minEnclosingCircle(contours[static_cast<int>(i)], center, radius);}}}setMouseCallback("main",on_MouseHandle); // 鼠標操作registration->getPointXYZ(&undistorted, pt11.y, pt11.x,x1, y1, z1); // 像素坐標轉化為空間坐標registration->getPointXYZ(&undistorted,pt21.y,pt21.x,x2, y2, z2);//rectangle(rgbd, rect, Scalar(0,255,0),2);line(rgbd, pt11, pt21, Scalar(0,255,0)); // 劃線l = sqrt(pow((x1-x2),2) + pow((y1-y2),2) + pow((z1-z2),2));cout << "length:" << l << "m" <<endl; // 輸出長度sprintf(str, "%.4lf", l);putText(rgbd, str1, pt21, FONT_HERSHEY_COMPLEX, 1,Scalar(0, 0, 255), 1);putText(rgbd, str, pt21, FONT_HERSHEY_COMPLEX, 1,Scalar(0, 0, 255), 1);circle(rgbd, pt11, 1, Scalar(255,255,0), 2);circle(rgbd, pt21, 1, Scalar(255,255,0), 2);cv::imshow("catch",dst);cv::imshow("depth", depthmat /4500.0);cv::imshow("main", rgbd);int key = cv::waitKey(1);protonect_shutdown = protonect_shutdown || (key > 0 && ((key & 0xFF) == 27)); // shutdown on escapelistener.release(frames);}dev->stop();dev->close();delete registration;#endifstd::cout << "stop!" << std::endl;return 0;
}void on_MouseHandle(int event, int x, int y, int flags, void* ustc)
{if (event == EVENT_LBUTTONDOWN){Point pt1 = Point(x, y);pt11 = pt1;}else if (event == EVENT_LBUTTONUP){Point pt2 = Point(x, y);pt21 = pt2;}
}
















 實現一個簡版的html+redux.js的demo)


