?在七月算法報的班,老師講的蠻好。好記性不如爛筆頭,關鍵內容還是記錄一下吧,課程入口,感興趣的同學可以學習一下。
-------------------------------------------------------------------------------------------------------------------------------
特征點法流程:
1.在圖像中提取特征點并計算特征描述????非常耗時約10ms ORB
2.在不同圖像中尋找特征匹配????????? ??? ??? 非常耗時𝑂(𝑛∧2) 暴力匹配
3.利用匹配點信息計算相機位姿?????? ??? ??? 比較快速<1ms
是否可以不使用特征匹配計算VO?
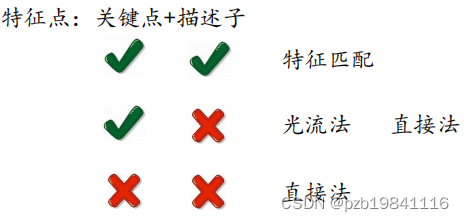
光流法:最小化重投影誤差 Reprojection error
直接法:最小化光度誤差 Photometric error
光流: 追蹤源圖像某個點在其他圖像中的運動。本質→估計像素在不同時刻圖像中的運動。
光流法又分為兩大類,每一類的計算方法也不同。
? 稀疏光流:計算部分像素運動 ---- Lucas Kanade
? 稠密光流:計算全部像素運動 ---- Horn Schunck

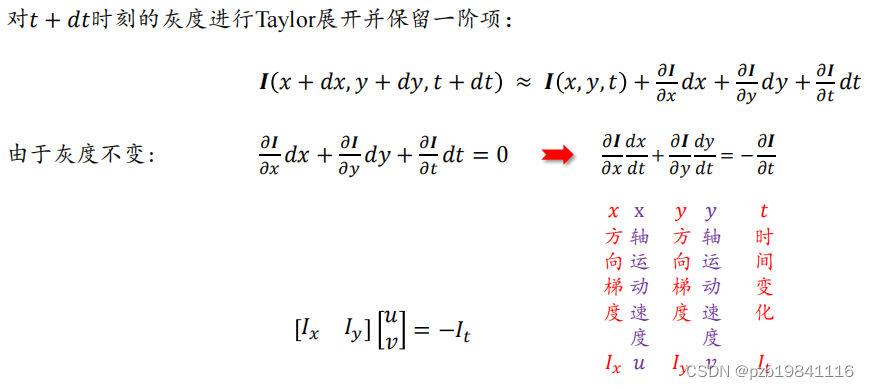
光流法的前提假說:灰度不變。

光流法的數學基礎
光流法中的L-K方法

LK光流的結果依賴于圖像梯度
? 但梯度不夠平滑,可能劇烈變化
? 局部的梯度不能用于預測長期圖像走向
解決方式:多層光流

光流法的總結:
? 可以看成最小化像素誤差的非線性優化
? 每次使用了 Taylor 一階近似,在離優化點較遠時效果不佳,往往需要迭代多次
? 運動較大時要使用金字塔
? 可以用于跟蹤圖像中的稀疏關鍵點的運動軌跡
? 得到配對點后,后續計算與特征法VO中相同
光流法的缺點:
? 沒有用到相機本身的幾何結構
? 沒有考慮到相機的旋轉和圖像的縮放
? 對于邊界上的點,光流不好追蹤
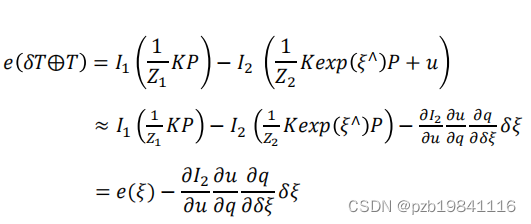
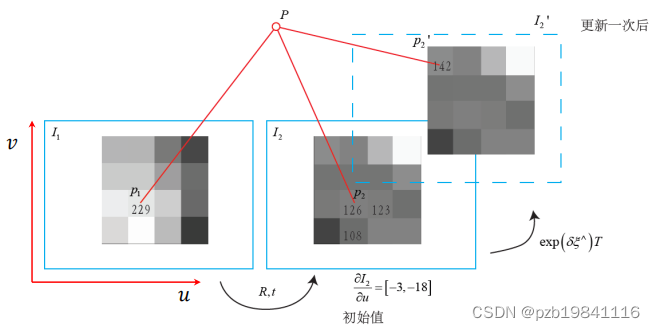
直接法:
通過相機模型對相機位姿變化進行估計


建立目標函數

計算過程

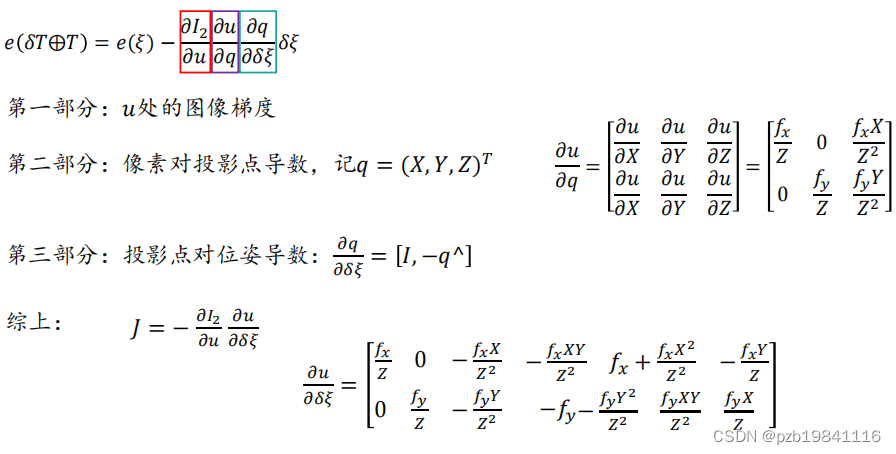
左擾動分解中三項的物理意義
根據使用的圖像信息不同,可分為:
? 稀疏直接法:只處理稀疏角點或關鍵點
? 稠密直接法:使用所有像素
? 半稠密直接法:使用部分梯度明顯的像素
直接法的直觀解釋:
? 像素灰度引導著優化的方向
? 要使優化成立,必須保證從初始估計到最優估計中間的梯度一直下降
? 這很容易受到圖像非凸性的影響
直接法的優勢與劣勢
優勢:
? 省略特征提取的時間
? 只需有像素梯度而不必是角點(對白墻等地方有較好效果)
? 可稠密或半稠密
劣勢:
? 灰度不變難以滿足(易受曝光和模糊影響)
? 單像素區分性差
? 圖像非凸性

)






)
)




 和純水中的吸收研究(Matlab代碼實現))

用來修改或者添加屬性或者屬性值)


![[保研/考研機試] KY26 10進制 VS 2進制 清華大學復試上機題 C++實現](http://pic.xiahunao.cn/[保研/考研機試] KY26 10進制 VS 2進制 清華大學復試上機題 C++實現)