1 Understand the FreeRTOS Distribution
1.1 Definition :FreeRTOS Port
FreeRTOS目前可以在20種不同的編譯器構建,并且可以在30多種不同的處理器架構上運行,每個受支持的編譯器和處理器組合被認為是一個單獨的FreeRTOS Port。
1.2 Building FreeRTOS
FreeRTOS可以被認為是一個庫,為應用程序提供多任務處理能力。 FreeRTOS以一組C源文件的形式提供,一些文件對FreeRTOS Port是通用的。而另一些文件則是特定于某個FreeRTOS Port。
1.3 FreeRTOSCofig.h
FreeRTOSConfig.h是FreeRTOS的配置文件,用來定制FreeRTOS在特定應用程序中使用,用來裁剪和配置FreeRTOS使用那些功能和不使用那些功能,所以FreeRTOS必須配置在項目工程中
1.4 FreeRTOS的頂級目錄
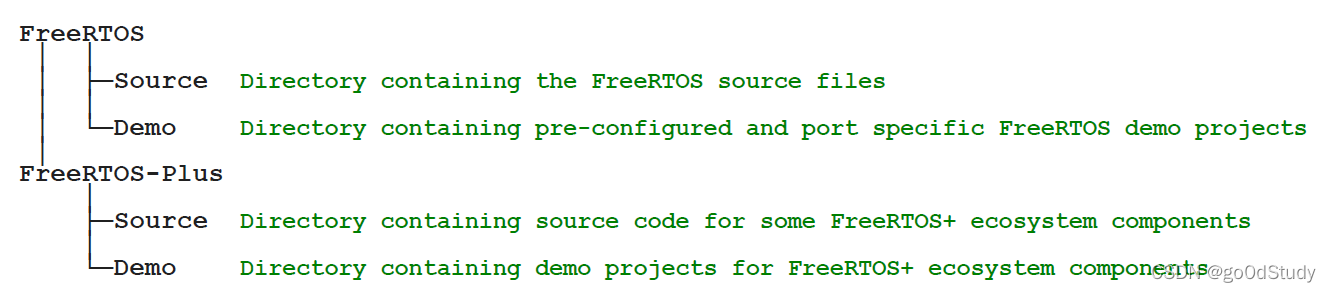
Source目錄下式FreeRTOS的源文件,Demo文件下是FreeRTOS的例子
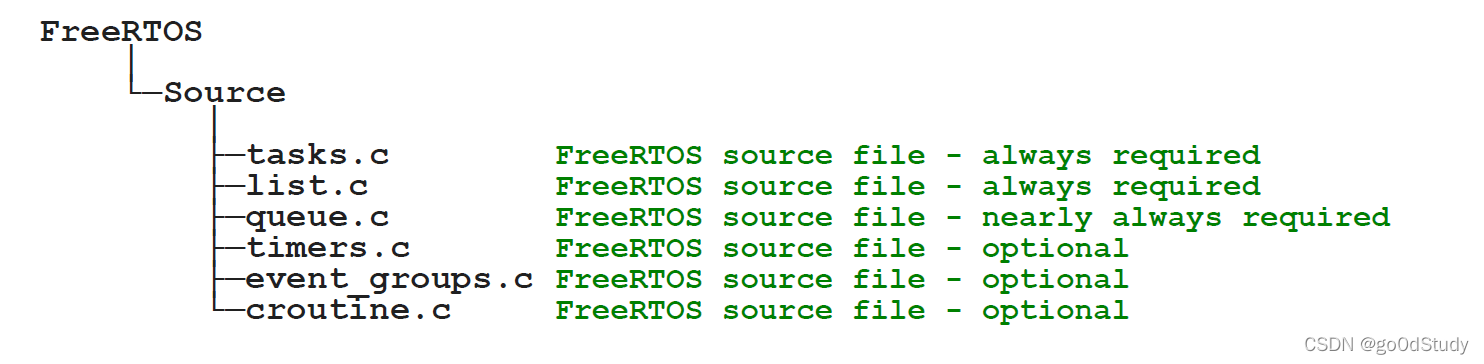
1.5 對所有FreeRTOS Port都通用的源文件
注:下面所說的文件都在FreeRTOS/Source目錄中

-
tasks.c和list.c文件是FreeRTOS的核心文件,對所有FreeRTOS Port都通用,總是要求包含在項目中。
-
queue.c文件提供隊列和信號量服務
-
timers.c提供軟定時器功能,如果項目工程中需要軟定時器,將其包含在內就可以了。
-
event_groups提供事件組功能
-
croutine.c實現了FreeRTOS的協程功能,協程旨在用于非常小的微控制器。現在很少使用
由于文件名可能會導致命名空間沖突,FreeRTOS禁止更改的FreeRTOS的源文件名,會導致項目出錯以及自動化工具和IDE插件的兼容性,所以我們自己的文件不要與FreeRTOS的文件名同名
1.6 可移植性
這里的可移植性指的是有兩種情況:
-
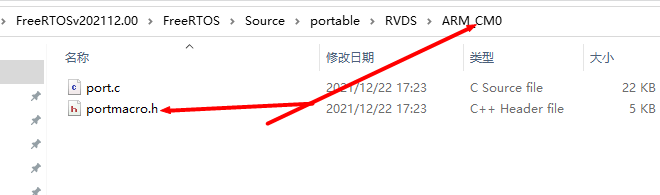
針對不同的編譯器和架構,要選擇不同的port.c和portmacro.h文件。特定于FreeRTOS Port的源文件包含在FreeRTOS/Source/portable目錄中,如果使用的編譯器(如Keil)在特定架構(ARM的CM0)的處理器上運行FreeRTOS,那么除了FreeRTOS源文件外,還必須構建位于FreeRTOS/Source/portable/[compiler]/[architecture]的文件
。
-
堆內存管理方案。使用早于V9.0.0的FreeRTOS版本的項目必須包含堆內存管理器,從FreeRTOS9.0.0開始,只要FreeRTOSConfig.h中的configSUPPORT_DYNAMIC_ALLOCATION設置為1或configSUPPORT_DYNAMIC_ALLOCATION沒有定義時,才需要內存管理器。
FreeRTOS提供了五個方案來分配內存,分別有heap_1到heap_5實現,包含在FreeRTOS/Source/portable/MemMang目錄下,如果項目中FreeRTOS使用動態內存分配,則必須在項目中使用這5個方案中的一個。
1.7 Include Paths
FreeRTOS要求編譯器的包含路徑中包含三個目錄:
- 核心FreeRTOS頭文件路徑,在FreeRTOS/Source/include文件夾下
- 特定于正在使用的 FreeRTOS 端口的源文件的路徑。 如上所述,需要包含 FreeRTOS/Source/portable/[compiler]/[architecture]目錄。
- FreeRTOSConfig.h
1.8 頭文件
使用 FreeRTOS API 的源文件必須包含“FreeRTOS.h”,后跟包含正在使用的 API 函數原型的頭文件——“task.h”、“queue.h”、“semphr.h” 、“timers.h”或“event_groups.h”。
2 Creating a FreeRTOS Project
我們在Keil+STM32F4上面實現
Keil打開一個跑馬燈實驗,并可以下載到板子上正確運行。新建兩個分組
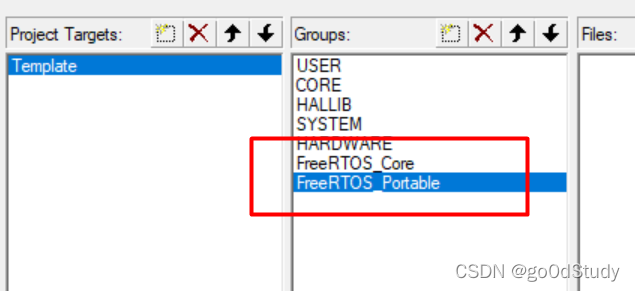
FreeRTOS_Core存放的是核心文件,對每個FreeRTOS Port都一樣,FreeRTOS_Protable是內存管理和特定于FreeRTOS Port的源文件,不同FreeRTOS Port可能會不同。

包含頭文件:

第一個是核心FreeRTOS頭文件路徑,在FreeRTOS/Source/include文件夾下
第二個是FreeRTOSConfig.h文件以及特定于正在使用的 FreeRTOS 端口的源文件的路徑FreeRTOS/Source/portable/[compiler]/[architecture]
到這里就配置好了,下面配置的是由于FreeRTOS和HAL庫一些函數名重復或者與HAL庫配置不符合
修改FreeRTOSConfig.h,第45行

port.c文件和stm32f4xx_it.c有重復定義的函數:PendSV_Handler、SVC_Handler、Systick_Handler,將stm32f4xx_it.c里面的這些函數屏蔽掉
在FreeRTOSConfig.h將configUSE_IDLE_HOOK、configUSE_TICK_HOOK、configUSE_MALLOC_FAILED_HOOK和configCHECK_FOR_STACK_OVERFLOW定義為0,這個宏定義為1的話,我們需要寫一個函數,不然會報錯,我們修改為0,就用定義這些函數了。
由于我用了正點原子的庫文件,還需要修改sys.h文件和delay.c文件以及usart.c文件
sys.h
#ifndef _SYS_H
#define _SYS_H
#include "stm32f4xx.h"//
//本程序只供學習使用,未經作者許可,不得用于其它任何用途
//ALIENTEK STM32F429開發板
//系統時鐘初始化
//包括時鐘設置/中斷管理/GPIO設置等
//正點原子@ALIENTEK
//技術論壇:www.openedv.com
//創建日期:2015/6/10
//版本:V1.0
//版權所有,盜版必究。
//Copyright(C) 廣州市星翼電子科技有限公司 2014-2024
//All rights reserved
//********************************************************************************
//修改說明
//無
// //0,不支持os
//1,支持os
#define SYSTEM_SUPPORT_OS 1 //定義系統文件夾是否支持OS
///
//定義一些常用的數據類型短關鍵字
typedef int32_t s32;
typedef int16_t s16;
typedef int8_t s8;typedef const int32_t sc32;
typedef const int16_t sc16;
typedef const int8_t sc8; typedef __IO int32_t vs32;
typedef __IO int16_t vs16;
typedef __IO int8_t vs8;typedef __I int32_t vsc32;
typedef __I int16_t vsc16;
typedef __I int8_t vsc8; typedef uint32_t u32;
typedef uint16_t u16;
typedef uint8_t u8;typedef const uint32_t uc32;
typedef const uint16_t uc16;
typedef const uint8_t uc8; typedef __IO uint32_t vu32;
typedef __IO uint16_t vu16;
typedef __IO uint8_t vu8;typedef __I uint32_t vuc32;
typedef __I uint16_t vuc16;
typedef __I uint8_t vuc8; //位帶操作,實現51類似的GPIO控制功能
//具體實現思想,參考<<CM3權威指南>>第五章(87頁~92頁).M4同M3類似,只是寄存器地址變了.
//IO口操作宏定義
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOJ_ODR_ADDr (GPIOJ_BASE+20) //0x40022414
#define GPIOK_ODR_ADDr (GPIOK_BASE+20) //0x40022814#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
#define GPIOJ_IDR_Addr (GPIOJ_BASE+16) //0x40022410
#define GPIOK_IDR_Addr (GPIOK_BASE+16) //0x40022810 //IO口操作,只對單一的IO口!
//確保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //輸出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //輸入 #define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //輸出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //輸入 #define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //輸出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //輸入 #define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //輸出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //輸入 #define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //輸出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //輸入#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //輸出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //輸入#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //輸出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //輸入#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //輸出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //輸入#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //輸出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //輸入#define PJout(n) BIT_ADDR(GPIOJ_ODR_Addr,n) //輸出
#define PJin(n) BIT_ADDR(GPIOJ_IDR_Addr,n) //輸入#define PKout(n) BIT_ADDR(GPIOK_ODR_Addr,n) //輸出
#define PKin(n) BIT_ADDR(GPIOK_IDR_Addr,n) //輸入void Stm32_Clock_Init(u32 plln,u32 pllm,u32 pllp,u32 pllq);//時鐘系統配置
//以下為匯編函數
void WFI_SET(void); //執行WFI指令
void INTX_DISABLE(void);//關閉所有中斷
void INTX_ENABLE(void); //開啟所有中斷
void MSR_MSP(u32 addr); //設置堆棧地址
#endifdelay.c
#include "delay.h"
#include "sys.h"
//
//如果使用OS,則包括下面的頭文件即可.
#if SYSTEM_SUPPORT_OS
#include "FreeRTOS.h" //FreeRTOS使用
#include "task.h"
#endifstatic u32 fac_us=0; //us延時倍乘數#if SYSTEM_SUPPORT_OS static u16 fac_ms=0; //ms延時倍乘數,在os下,代表每個節拍的ms數
#endifextern void xPortSysTickHandler(void);
//systick中斷服務函數,使用OS時用到
void SysTick_Handler(void)
{ if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系統已經運行{xPortSysTickHandler(); }HAL_IncTick();
}//初始化延遲函數
//當使用ucos的時候,此函數會初始化ucos的時鐘節拍
//SYSTICK的時鐘固定為AHB時鐘
//SYSCLK:系統時鐘頻率
void delay_init(u8 SYSCLK)
{u32 reload;HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);//SysTick頻率為HCLKfac_us=SYSCLK; //不論是否使用OS,fac_us都需要使用reload=SYSCLK; //每秒鐘的計數次數 單位為K reload*=1000000/configTICK_RATE_HZ; //根據configTICK_RATE_HZ設定溢出時間//reload為24位寄存器,最大值:16777216,在180M下,約合0.745s左右 fac_ms=1000/configTICK_RATE_HZ; //代表OS可以延時的最少單位 SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk;//開啟SYSTICK中斷SysTick->LOAD=reload; //每1/configTICK_RATE_HZ斷一次 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //開啟SYSTICK
} //延時nus
//nus:要延時的us數.
//nus:0~190887435(最大值即2^32/fac_us@fac_us=22.5)
void delay_us(u32 nus)
{ u32 ticks;u32 told,tnow,tcnt=0;u32 reload=SysTick->LOAD; //LOAD的值 ticks=nus*fac_us; //需要的節拍數 told=SysTick->VAL; //剛進入時的計數器值while(1){tnow=SysTick->VAL; if(tnow!=told){ if(tnow<told)tcnt+=told-tnow; //這里注意一下SYSTICK是一個遞減的計數器就可以了.else tcnt+=reload-tnow+told; told=tnow;if(tcnt>=ticks)break; //時間超過/等于要延遲的時間,則退出.} };
} //延時nms,會引起任務調度
//nms:要延時的ms數
//nms:0~65535
void delay_ms(u32 nms)
{ if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系統已經運行{ if(nms>=fac_ms) //延時的時間大于OS的最少時間周期 { vTaskDelay(nms/fac_ms); //FreeRTOS延時}nms%=fac_ms; //OS已經無法提供這么小的延時了,采用普通方式延時 }delay_us((u32)(nms*1000)); //普通方式延時
}//延時nms,不會引起任務調度
//nms:要延時的ms數
void delay_xms(u32 nms)
{u32 i;for(i=0;i<nms;i++) delay_us(1000);
}usart.c
#include "usart.h"
#include "delay.h"
//
//如果使用os,則包括下面的頭文件即可.
#if SYSTEM_SUPPORT_OS
#include "FreeRTOS.h" //os 使用
#endif//加入以下代碼,支持printf函數,而不需要選擇use MicroLIB
//#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#if 1
#pragma import(__use_no_semihosting)
//標準庫需要的支持函數
struct __FILE
{ int handle;
}; FILE __stdout;
//定義_sys_exit()以避免使用半主機模式
void _sys_exit(int x)
{ x = x;
}
//重定義fputc函數
int fputc(int ch, FILE *f)
{ while((USART1->SR&0X40)==0);//循環發送,直到發送完畢 USART1->DR = (u8) ch; return ch;
}
#endif #if EN_USART1_RX //如果使能了接收
//串口1中斷服務程序
//注意,讀取USARTx->SR能避免莫名其妙的錯誤
u8 USART_RX_BUF[USART_REC_LEN]; //接收緩沖,最大USART_REC_LEN個字節.
//接收狀態
//bit15, 接收完成標志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字節數目
u16 USART_RX_STA=0; //接收狀態標記 u8 aRxBuffer[RXBUFFERSIZE];//HAL庫使用的串口接收緩沖
UART_HandleTypeDef UART1_Handler; //UART句柄//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound)
{ //UART 初始化設置UART1_Handler.Instance=USART1; //USART1UART1_Handler.Init.BaudRate=bound; //波特率UART1_Handler.Init.WordLength=UART_WORDLENGTH_8B; //字長為8位數據格式UART1_Handler.Init.StopBits=UART_STOPBITS_1; //一個停止位UART1_Handler.Init.Parity=UART_PARITY_NONE; //無奇偶校驗位UART1_Handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; //無硬件流控UART1_Handler.Init.Mode=UART_MODE_TX_RX; //收發模式HAL_UART_Init(&UART1_Handler); //HAL_UART_Init()會使能UART1HAL_UART_Receive_IT(&UART1_Handler, (u8 *)aRxBuffer, RXBUFFERSIZE);//該函數會開啟接收中斷:標志位UART_IT_RXNE,并且設置接收緩沖以及接收緩沖接收最大數據量}//UART底層初始化,時鐘使能,引腳配置,中斷配置
//此函數會被HAL_UART_Init()調用
//huart:串口句柄void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{//GPIO端口設置GPIO_InitTypeDef GPIO_Initure;if(huart->Instance==USART1)//如果是串口1,進行串口1 MSP初始化{__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA時鐘__HAL_RCC_USART1_CLK_ENABLE(); //使能USART1時鐘GPIO_Initure.Pin=GPIO_PIN_9; //PA9GPIO_Initure.Mode=GPIO_MODE_AF_PP; //復用推挽輸出GPIO_Initure.Pull=GPIO_PULLUP; //上拉GPIO_Initure.Speed=GPIO_SPEED_FAST; //高速GPIO_Initure.Alternate=GPIO_AF7_USART1; //復用為USART1HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA9GPIO_Initure.Pin=GPIO_PIN_10; //PA10HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA10#if EN_USART1_RXHAL_NVIC_EnableIRQ(USART1_IRQn); //使能USART1中斷通道HAL_NVIC_SetPriority(USART1_IRQn,3,3); //搶占優先級3,子優先級3
#endif }}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance==USART1)//如果是串口1{if((USART_RX_STA&0x8000)==0)//接收未完成{if(USART_RX_STA&0x4000)//接收到了0x0d{if(aRxBuffer[0]!=0x0a)USART_RX_STA=0;//接收錯誤,重新開始else USART_RX_STA|=0x8000; //接收完成了 }else //還沒收到0X0D{ if(aRxBuffer[0]==0x0d)USART_RX_STA|=0x4000;else{USART_RX_BUF[USART_RX_STA&0X3FFF]=aRxBuffer[0] ;USART_RX_STA++;if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收數據錯誤,重新開始接收 } }}}
}//串口1中斷服務程序
void USART1_IRQHandler(void)
{ u32 timeout=0;u32 maxDelay=0x1FFFF;HAL_UART_IRQHandler(&UART1_Handler); //調用HAL庫中斷處理公用函數timeout=0;while (HAL_UART_GetState(&UART1_Handler) != HAL_UART_STATE_READY)//等待就緒{timeout++;超時處理if(timeout>maxDelay) break; }timeout=0;while(HAL_UART_Receive_IT(&UART1_Handler, (u8 *)aRxBuffer, RXBUFFERSIZE) != HAL_OK)//一次處理完成之后,重新開啟中斷并設置RxXferCount為1{timeout++; //超時處理if(timeout>maxDelay) break; }
}
#endif /*下面代碼我們直接把中斷控制邏輯寫在中斷服務函數內部。*/
/*//串口1中斷服務程序
void USART1_IRQHandler(void)
{ u8 Res;if((__HAL_UART_GET_FLAG(&UART1_Handler,UART_FLAG_RXNE)!=RESET)) //接收中斷(接收到的數據必須是0x0d 0x0a結尾){HAL_UART_Receive(&UART1_Handler,&Res,1,1000); if((USART_RX_STA&0x8000)==0)//接收未完成{if(USART_RX_STA&0x4000)//接收到了0x0d{if(Res!=0x0a)USART_RX_STA=0;//接收錯誤,重新開始else USART_RX_STA|=0x8000; //接收完成了 }else //還沒收到0X0D{ if(Res==0x0d)USART_RX_STA|=0x4000;else{USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;USART_RX_STA++;if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收數據錯誤,重新開始接收 } }} }HAL_UART_IRQHandler(&UART1_Handler);
}
#endif
*/之后就可以運行了
3 Data Types and Coding Style Guide
3.1 Data Types
FreeRTOS的每個port都有一個唯一的portmacro.h頭文件,其中包含TickType_t 和BaseType_t。
TickType_t 是用于保存滴答計數值和指定時間的數據類型。TickType_t 可以是無符號 16 位類型,也可以是無符號 32 位類型,具體取決于 FreeRTOSConfig.h 中 configUSE_16_BIT_TICKS 的設置。 如果 configUSE_16_BIT_TICKS 設置為 1,則 TickType_t 定義為 uint16_t。 如果 configUSE_16_BIT_TICKS 設置為 0,則 TickType_t 定義為 uint32_t。
使用 16 位類型可以大大提高 8 位和 16 位架構上的效率,但嚴重限制了可以指定的最大塊周期。 沒有理由在 32 位架構上使用 16 位類型。
BaseType_t 通常用于只能取非常有限范圍的值的返回類型,以及 pdTRUE/pdFALSE 類型的布爾值。這始終被定義為體系結構最有效的數據類型。 通常,這是 32 位架構上的 32 位類型,16 位架構上的 16 位類型,以及 8 位架構上的 8 位類型。
3.2 Variable Names
變量以其類型為前綴:‘c’ for char,‘s’ for int16_t(short),‘l’ for int32_t(long),and ‘x’ for BaseType_t和其他非標準類型。
如果一個變量是無符號的,以’u’為前綴,如果變量是指針,以’p’為前綴,比如’pc’代表字符指針類型
3.3 Function Names
函數以他們返回的類型和它們在其中定義的文件名為前綴,比如:
vTaskPrioritySet():返回類型為void,定義在task.c文件中
xQueueReceive():返回值為BaseType_t類型,定義在queue.c文件中
3.4 Macro Names
大多數宏都是大寫的,并以小寫字母作為前綴,指示宏的定義位置。信號量API幾乎完全是作為一組宏編寫的,但遵循函數命名的約定。下面的四個宏用于整個FreeRTOS中





重定義問題的解決)
)
)


函數與示例)
)
)



)


