原創 | 文 BFT機器人?
L3 功能加速落地,政策標準有望明確
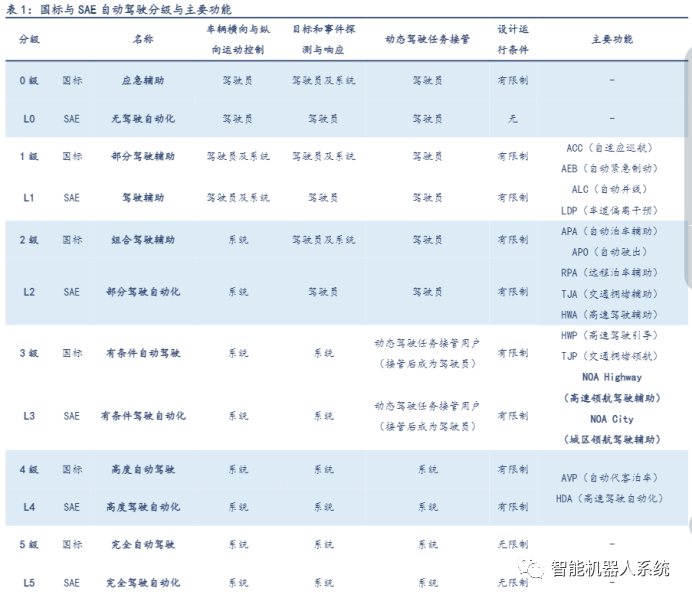
L2 發展日益成熟,L3 功能加速落地。根據市場監管總局發布的《汽車駕駛自動化分級》與 SAE發布的自動駕駛分級標準,自動駕駛主要分為 6 個級別(0 級到 5 級,L0 到 L5)。從車輛控制、目標與事件檢測、任務接管等層面看,國標與 SAE 分級的標準基本一致。
L2 及以下級別的主要功能包括 ACC(自適應巡航)、AEB(自動緊急制動)、APA(自動泊車輔助)等,工信部副部長辛國斌表示,2022 年具備組合輔助駕駛功能(2 級)的乘用車新車滲透率達到了34.5%。隨著智能化軟硬件的不斷發展,當前行業正處于 L2 向 L3 過渡的階段,L3 階段代表功能如高速/城市 NOA 已逐漸開始落地。
L3 落地阻礙仍存,責任界定仍需明晰。2018 年,美國一輛特斯拉 Model X 在激活“自動駕駛”功能期間變道時發生事故導致駕駛員死亡,該事故引發了事故責任歸屬的廣泛討論。
由于特斯拉的 Autopilot 仍需手扶方向盤,因此它的智能駕駛級別為 L2 級別駕駛輔助,而不是 L3 級別自動駕駛,最終事故責任被歸結于過度依賴 L2 的駕駛員。
無論是國標 3 級還是 SAE 劃分標準中的 L3,車輛運動、目標與事件檢測均由智能駕駛系統完成,在出現動態駕駛任務后,接管者成為駕駛員,因此正常行駛過程中坐在主駕位上的“乘客”已經不屬于實際意義上的駕駛員,因此在 L3 級智能駕駛發生事故之后,人機責任的劃分逐漸成為消費者對自動駕駛汽車的重要關切。
作為輔助駕駛邁向自動駕駛的關鍵節點,L3 標準重要性不言而喻。相比 L1、L2 輔助駕駛主導者是駕駛員,L4、L5 主導者是智駕系統,L3 級別自動駕駛可以認為是輔助駕駛邁向自動駕駛的關鍵節點。
近年來,部分車企由于 L3 相關政策缺失開始宣傳諸如 L2+、L2.9 等概念。隨著L3 技術與功能層面已日趨成熟,我們認為當前 L3 的核心問題之一在于是否可以通過在政策法規明確人機共駕的權責。
高階智駕漸進式迭代逐步得到驗證,高速到城市 NOA 的發展路徑已逐步走通
自動駕駛漸進式迭代路線逐漸占據上風。自動駕駛領域存在跨越式與漸進式迭代路線之爭。前者以 Waymo 為代表,以無人駕駛為目標研發 Robotaxi,達到去掉人類司機的目的。
后者以特斯拉為代表,其主張從 L2 階段逐漸過渡到 L4 自動駕駛,其主要策略是推動低階智能駕駛系統(L2)快速前裝量產,通過龐大品牌保有量低成本收集數據以訓練和迭代算法,最終邁向全自、動駕駛。
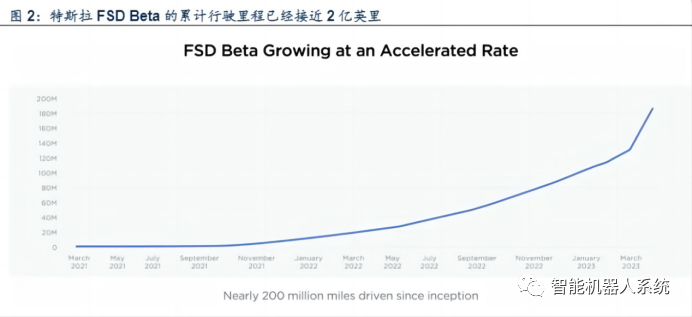
近年來,因 L4 自動駕駛套件成本過高,并且運營區域較小,營收情況較為有限,收支嚴重不平衡的眾多 L4 企業遭遇經營困難。而特斯拉銷量與業績持續攀升,截止 22 年底,有超 40 萬名特斯拉車主開通了 FSD Beta 的測試權限,截止 2023 年特斯拉股東大會,FSD 的累計行駛里程已經接近 2 億英里。

各國 L3 自動駕駛政策對比:德、英、日、韓、美逐步落地
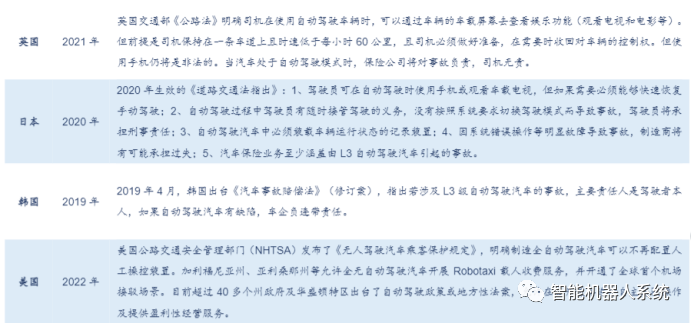
深圳率先試點 德、英、日、韓等國 L3 法規紛紛落地,奔馳 L3 在美試點上路。德國、英國、日本、韓國 L3自動駕駛政策落地,對車輛行駛場景、駕駛員行為、事故責任劃分進行了詳細規定。在事故認定方面,各國基本明確司機在未做出非法行為的情況下,保險公司或主機廠將承擔主要責任。
而在美國,全境范圍內的聯邦法規仍在制定中,大多數立法由各州通過。奔馳的 L3 級系統DRIVE PILOT 于 23 年初獲得內華達州法規上路批準,成為首家在美國實現量產 L3 上路的車企,搭載 DRIVE PILOT 的新款奔馳 S 級轎車、純電轎車 EQS,最快于 2023 年下半年在美國交付。

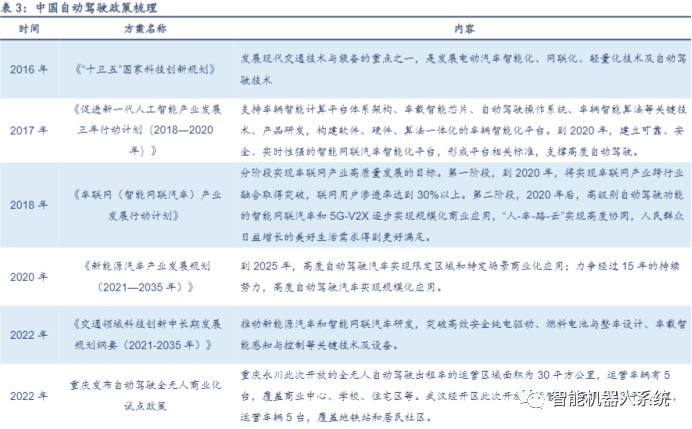
中國:頂層設計與地方試點并舉,微觀權責劃分尚不完善。我國早期自動駕駛政策方向主要以宏觀戰略規劃為主,2016 年國務院發布的《“十三五”國家科技創新規劃》正式將自動駕駛提升到國家戰略層面,而后“自動駕駛”在政策文件中的出現頻率越來越高。
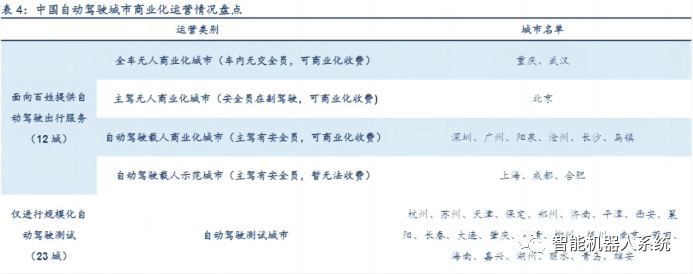
近年來,商業化運營試點逐漸鋪開,北京、上海、重慶、武漢等地的自動駕駛運營開始落地。關于事故責任劃分問題,相關法規仍需完善,目前僅有深圳于 2022 年 8 月開始實施《深圳經濟特區自動駕駛管理條例》,是國內首次對智能網聯汽車的準入等級、上路行駛作出具體規定,并且也明確了事故后的責任劃分。
高階智駕漸進式迭代逐步得到驗證,高速到城市 NOA 的發展路徑已逐步走通
智能駕駛漸進式迭代成為主流,先高速后城市符合智能駕駛發展規律,自動駕駛漸進式迭代路線逐漸占據上風。自動駕駛領域存在跨越式與漸進式迭代路線之爭。前者以 Waymo 為代表,以無人駕駛為目標研發 Robotaxi,達到去掉人類司機的目的。
后者以特斯拉為代表,其主張從 L2 階段逐漸過渡到 L4 自動駕駛,其主要策略是推動低階智能駕駛系統(L2)快速前裝量產,通過龐大品牌保有量低成本收集數據以訓練和迭代算法,最終邁向全自動駕駛。
近年來,因 L4 自動駕駛套件成本過高,并且運營區域較小,營收情況較為有限,收支嚴重不平衡的眾多 L4 企業遭遇經營困難。而特斯拉銷量與業績持續攀升,截止 22 年底,有超 40 萬名特斯拉車主開通了 FSD Beta 的測試權限,截止 2023 年特斯拉股東大會,FSD 的累計行駛里程已經接近 2 億英里。
特斯拉引領 L3 級別自動駕駛由高速向城市的漸進式迭代路徑。特斯拉的智能駕駛包主要分為AP(Autopilot),EAP(Enhanced Autopilot)增強輔助駕駛以及頂配 FSD(Full Self-Driving)。
2014 年 10 月,特斯拉開始搭載 Autopilot,主要功能包括高速公路上駕駛、剎車和加速。2019年 6 月,特斯拉官方正式向中國選配 FSD 的車型推送最新版本 NOA,把場景從高速公路嘗試擴展到城市街道。
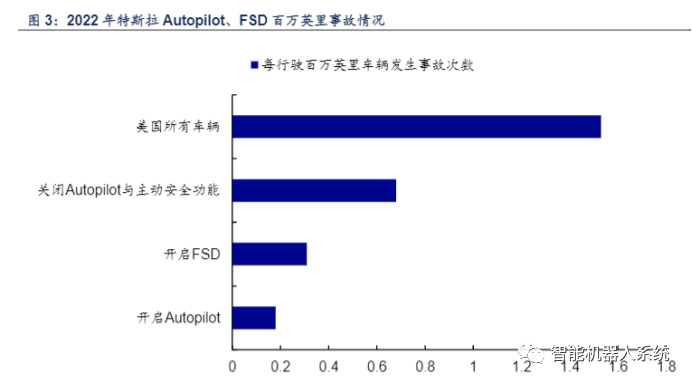
經過多年的迭代,Autopilot、FSD 的安全性能均有明顯提升,2022 年,在激活 Autopilot 的情況下,每行駛百萬英里(主要是高速公路)發生事故的次數是 0.18。
在開啟 FSD 的情況下,每行駛百萬英里(主要是非高速公路)發生事故的次數是 0.31;根據 NHTSA的數據,美國所有車輛每行駛百萬英里發生事故的次數是 1.53,分別為激活 Autopilot 和 FSD的 8.5、4.9 倍。
我們認為先高速、后城市符合智能駕駛迭代與發展規律。高速 NOA 場景包括車輛實現自主上下匝道、智能變道、智能超車、提示預警、車道保持、自動避讓、巡航行駛等技術功能。
相比城市路段,高速路段的自動駕駛技術更簡單,高速路段出現的物體種類是非常固定的,大大降低了圖像采集與識別的難度,同時高速路段行車速度較快,更易快速積累足夠的行駛里程實現智駕系統的快速迭代。
軟硬件成本有望下降,應用車型價格帶逐漸下探
智能汽車同樣遵循摩爾定律,智駕硬件長期成本下降趨勢明顯。據我們測算,L2+級別自動駕駛感知硬件 BOM 成本約為 4600 元,到 2025 年還有超 30%的降本空間。
包含激光雷達的 L3 智駕感知硬件 BOM 成本接近 11000 元,到 2025 年約為 7500 元,亦有超 30%的降本空間。“重感知,輕地圖”路線逐漸跑通,有望大幅減少傳感器用量與軟件成本。
特斯拉純視覺方案主要保留了成本較低的攝像頭,“BEV+Transformer”方案為輕地圖化提供技術可行性,輕地圖化亦具有可觀的降本能力。在整車層面,L2 車型價格帶不斷下探,無激光雷達車型也呈現逐漸增加的趨勢。
在智能駕駛漸進式的發展路徑下,L3 功能正加速落地,高速到城市場景正不斷拓展,我們認為在政策、技術、成本端三大核心因素驅動下,智能駕駛拐點逐漸顯現。在未來,智能駕駛技術會越來越成熟,普及到家家戶戶。
作者?|?春花
排版 | 居居手
更多精彩內容請關注公眾號:BFT機器人
本文為原創文章,版權歸BFT機器人所有,如需轉載請與我們聯系。若您對該文章內容有任何疑問,請與我們聯系,將及時回應。?





![C# 使用FFmpeg.Autogen對byte[]進行編解碼](http://pic.xiahunao.cn/C# 使用FFmpeg.Autogen對byte[]進行編解碼)



)









