標題
- 自適應濾波器
- 自適應局部降噪濾波器
- 自適應中值濾波器
自適應濾波器
自適應局部降噪濾波器
均值是計算平均值的區域上的平均灰度,方差是該區域上的圖像對比度
g(x,y)g(x, y)g(x,y)噪聲圖像在(x,y)(x, y)(x,y)處的值
ση2\sigma_{\eta}^2ση2? 為噪聲的方差,為常數,需要通過估計得到
zˉSxy\bar{z}_{S_{xy}}zˉSxy?? 為局部平均灰度
σSxy2\sigma_{S_{xy}}^2σSxy?2? 為局部方差
f^(x,y)=g(x,y)?ση2σSxy2[g(x,y)?zˉSxy](5.32)\hat{f}(x,y) = g(x,y) - \frac{\sigma_{\eta} ^ 2 }{\sigma_{S_{xy}}^2} \big[ g(x,y) - \bar z_{S_{xy}}\big] \tag{5.32}f^?(x,y)=g(x,y)?σSxy?2?ση2??[g(x,y)?zˉSxy??](5.32)
當ση2>ση2\sigma_{\eta}^2 > \sigma_{\eta}^2ση2?>ση2? 時,將比率設置為1,這樣做會使得濾波器是非線性的,但可阻止因缺少圖像噪聲方差的知識而產生無意義的結果(即負灰度級)。
若ση2\sigma_{\eta}^2ση2?估計值太低時,算法會因校正量小于就有的值而返回與原圖像接近的圖像。估計值太高會使得方差的比率在1.0處被水平,與正常情況相比,算法會更頻繁地從圖像中減去平均值。若允許為負值,且最后重新標定圖像,則如前所述,結果 將損失圖像的動態范圍。
整個圖像的相關值:
μn=∑i=0L?1(ri?m)np(ri)\mu_n = \sum_{i=0}^{L-1}(r_i -m)^n p(r_i)μn?=∑i=0L?1?(ri??m)np(ri?) 為灰度值r相對于其均值同的第n階矩
m=∑i=0L?1rip(ri)m = \sum_{i=0}^{L-1} r_i p(r_i)m=∑i=0L?1?ri?p(ri?) 均值
σ2=μ2=∑i=0L?1(ri?m)2p(ri)\sigma^2 = \mu_2 = \sum_{i=0}^{L-1}(r_i - m)^2 p(r_i)σ2=μ2?=∑i=0L?1?(ri??m)2p(ri?) 方差
鄰域內的相關值:
mSxy=∑i=0L?1riPSxy(ri)m_{S_{xy}} = \sum_{i=0}^{L-1} r_i P_{S_{xy}}(r_i)mSxy??=∑i=0L?1?ri?PSxy??(ri?) 均值
σSxy2=μ2=∑i=0L?1(ri?mSxy)2PSxy(ri)\sigma_{S_{xy}}^2 = \mu_2 = \sum_{i=0}^{L-1}(r_i - m_{S_{xy}})^2 P_{S_{xy}}(r_i)σSxy?2?=μ2?=∑i=0L?1?(ri??mSxy??)2PSxy??(ri?) 方差
def calculate_sigma_eta(image):""":param image: input image:return: sigma eta of image"""hist, bins = np.histogram(image.flatten(), bins=256, range=[0, 256], density=True)r = bins[:-1]m = np.sum(r * hist)sigma = np.sum((r - m)**2 * hist)return sigmadef calculate_sigma_sxy(block):"""param block: input blockreturn: sigma sxy of block"""#==========公式法==========hist, bins = np.histogram(block.flatten(), bins=256, range=[0, 256], density=True)r = bins[:-1]m = (r * hist).sum()sigma = ((r - m)**2 * hist).sum()#===========等價于========
# m = np.mean(block)
# sigma = np.var(block)return sigma, m
def adaptive_local_denoise(image, kernel, sigma_eta=1):"""adaptive local denoising math: $$\hat{f}(x,y) = g(x,y) - \frac{\sigma_{\eta} ^ 2 }{\sigma_{S_{xy}}^2} \big[ g(x,y) - \bar z_{S_{xy}}\big]$$param: image: input image for denoisingparam: kernel: input kernel, actually only use kernel shape, just want to keep the format as mean filterreturn: image after adaptive local denoising """epsilon = 1e-8height, width = image.shape[:2]m, n = kernel.shape[:2]padding_h = int((m -1)/2)padding_w = int((n -1)/2)# 這樣的填充方式,可以奇數核或者偶數核都能正確填充image_pad = np.pad(image, ((padding_h, m - 1 - padding_h), \(padding_w, n - 1 - padding_w)), mode="edge")img_result = np.zeros(image.shape)for i in range(height):for j in range(width):block = image_pad[i:i + m, j:j + n]gxy = image[i, j]z_sxy = np.mean(block)sigma_sxy = np.var(block)rate = sigma_eta / (sigma_sxy + epsilon)if rate >= 1:rate = 1img_result[i, j] = gxy - rate * (gxy - z_sxy)return img_result
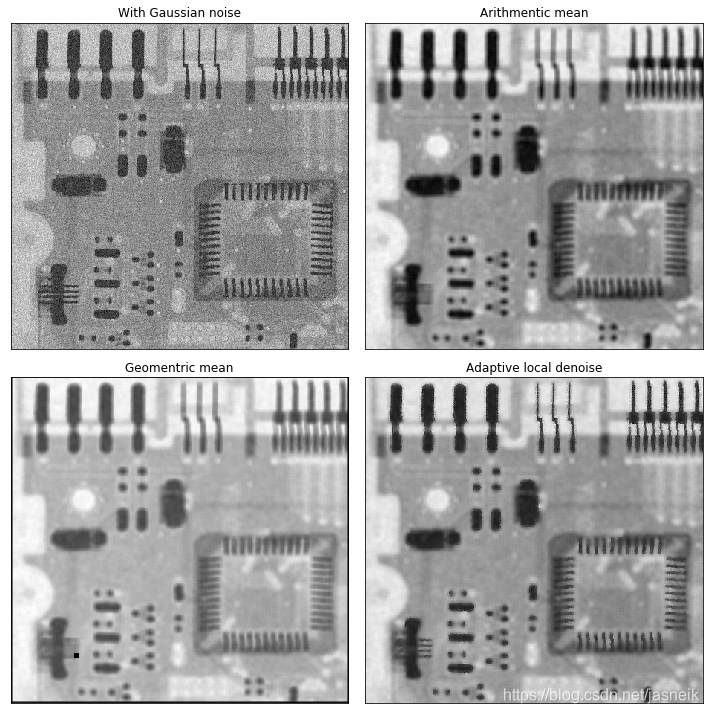
# 自適應局部降噪濾波器處理高斯噪聲
img_ori = cv2.imread('DIP_Figures/DIP3E_Original_Images_CH05/Fig0513(a)(ckt_gaussian_var_1000_mean_0).tif', 0) #直接讀為灰度圖像kernel = np.ones([7, 7])
img_arithmentic_mean = arithmentic_mean(img_ori, kernel=kernel)
img_geometric_mean = geometric_mean(img_ori, kernel=kernel)
img_adaptive_local = adaptive_local_denoise(img_ori, kernel=kernel, sigma_eta=1000)plt.figure(figsize=(10, 10))plt.subplot(221), plt.imshow(img_ori, 'gray'), plt.title('With Gaussian noise'), plt.xticks([]),plt.yticks([])
plt.subplot(222), plt.imshow(img_arithmentic_mean, 'gray'), plt.title('Arithmentic mean'), plt.xticks([]),plt.yticks([])
plt.subplot(223), plt.imshow(img_geometric_mean, 'gray'), plt.title('Geomentric mean'), plt.xticks([]),plt.yticks([])
plt.subplot(224), plt.imshow(img_adaptive_local, 'gray'), plt.title('Adaptive local denoise'), plt.xticks([]),plt.yticks([])
plt.tight_layout()
plt.show()
自適應中值濾波器
zmin是Sxyz_{\text{min}}是S_{xy}zmin?是Sxy?鄰域中的最小灰度值;zmax是Sxyz_{\text{max}}是S_{xy}zmax?是Sxy?鄰域中的最大灰度值;zmed是Sxyz_{\text{med}}是S_{xy}zmed?是Sxy?鄰域中的中值, zxyz_{xy}zxy?是坐標(x,y)(x,y)(x,y)處的灰度值;SmaxS_{\text{max}}Smax?是SxyS_{xy}Sxy?允許的最大尺寸,是大于1的奇正整數。
自適應中值濾波算法在點(x,y)(x, y)(x,y)處使用兩個處理層次,分別表示為層次AAA和層次BBB:
層次AAA:
若zmin<zmed<zmaxz_{\text{min}} < z_{\text{med}} < z_{\text{max}}zmin?<zmed?<zmax? 則轉到層次B
否則,增SxyS_{xy}Sxy?的尺寸,
若Sxy≤SmaxS_{xy} \leq S_{\text{max}}Sxy?≤Smax?, 則重復層次A
否則,輸出zmedz_{\text{med}}zmed?
層次BBB:
若zmin<zxy<zmaxz_{\text{min}} < z_{xy} < z_{\text{max}}zmin?<zxy?<zmax?,則輸出zxyz_{xy}zxy?
否則,輸出 zmedz_{\text{med}}zmed?
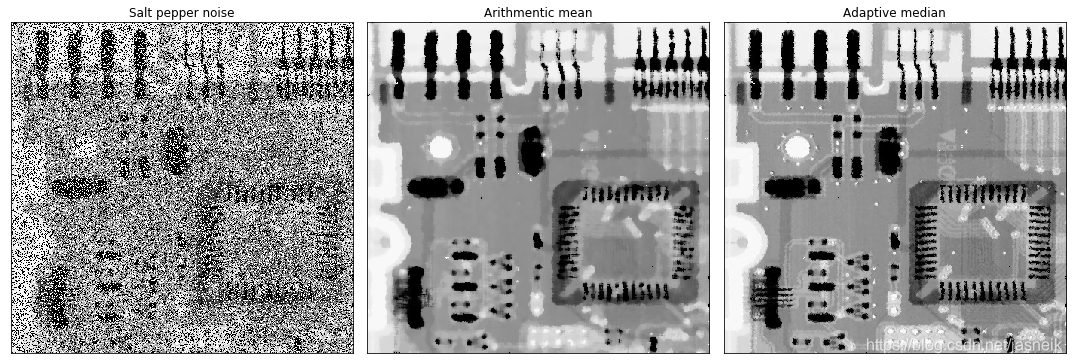
這算法有3個主要的目的:去除椒鹽(沖激)噪聲,平滑其他非常沖激噪聲,減少失真(如目標邊界的過度細化)。該算法統計上認為zminz_{\text{min}}zmin?和zmaxz_{\text{max}}zmax?是區域SxyS_{xy}Sxy?的“類沖激”噪聲分量,即使它們不是圖像中的最小像素和最大像素值。
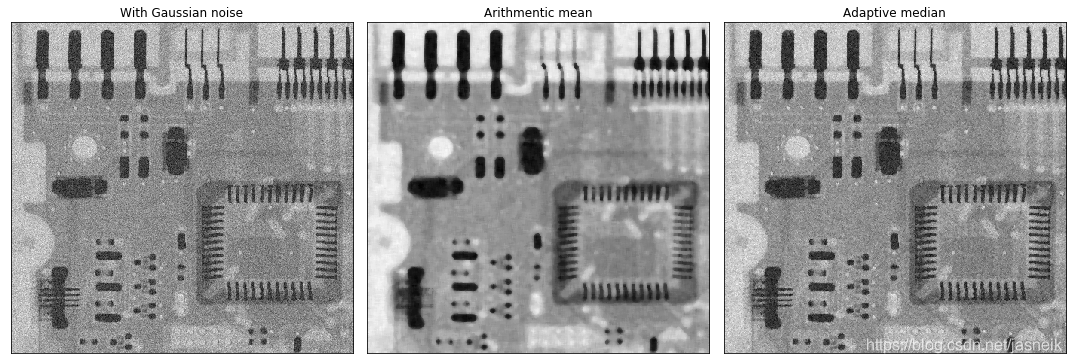
能很好的處理椒鹽噪聲,但對高斯噪聲不敏感
def adaptive_median_denoise(image, sxy=3, smax=7):"""adaptive median denoising param: image: input image for denoisingparam: sxy : minimum kernel sizeparam: smax : maximum kernel sizereturn: image after adaptive median denoising """epsilon = 1e-8height, width = image.shape[:2]m, n = smax, smaxpadding_h = int((m -1)/2)padding_w = int((n -1)/2)# 這樣的填充方式,可以奇數核或者偶數核都能正確填充image_pad = np.pad(image, ((padding_h, m - 1 - padding_h), \(padding_w, n - 1 - padding_w)), mode="edge")img_new = np.zeros(image.shape)for i in range(padding_h, height + padding_h):for j in range(padding_w, width + padding_w):sxy = 3 #每一輪都重置 k = int(sxy/2)block = image_pad[i-k:i+k+1, j-k:j+k+1]zxy = image[i - padding_h][j - padding_w]zmin = np.min(block)zmed = np.median(block)zmax = np.max(block)if zmin < zmed < zmax:if zmin < zxy < zmax:img_new[i - padding_h, j - padding_w] = zxyelse:img_new[i - padding_h, j - padding_w] = zmedelse:while True:sxy = sxy + 2k = int(sxy / 2)if zmin < zmed < zmax or sxy > smax:breakblock = image_pad[i-k:i+k+1, j-k:j+k+1]zmed = np.median(block)zmin = np.min(block)zmax = np.max(block)if zmin < zmed < zmax or sxy > smax:if zmin < zxy < zmax:img_new[i - padding_h, j - padding_w] = zxyelse:img_new[i - padding_h, j - padding_w] = zmedreturn img_new
# 自適中值濾波器處理椒鹽噪聲
img_ori = cv2.imread('DIP_Figures/DIP3E_Original_Images_CH05/Fig0514(a)(ckt_saltpep_prob_pt25).tif', 0) #直接讀為灰度圖像kernel = np.ones([7, 7])img_arithmentic_mean = median_filter(img_ori, kernel=kernel)
img_adaptive_median = adaptive_median_denoise(img_ori)plt.figure(figsize=(15, 10))
plt.subplot(231), plt.imshow(img_ori, 'gray'), plt.title('Salt pepper noise'), plt.xticks([]),plt.yticks([])
plt.subplot(232), plt.imshow(img_arithmentic_mean, 'gray'), plt.title('Arithmentic mean'), plt.xticks([]),plt.yticks([])
plt.subplot(233), plt.imshow(img_adaptive_median, 'gray'), plt.title('Adaptive median'), plt.xticks([]),plt.yticks([])
plt.tight_layout()
plt.show()
# 自適中值濾波器處理高斯噪聲
img_ori = cv2.imread('DIP_Figures/DIP3E_Original_Images_CH05/Fig0513(a)(ckt_gaussian_var_1000_mean_0).tif', 0) #直接讀為灰度圖像kernel = np.ones([7, 7])
img_arithmentic_mean = median_filter(img_ori, kernel=kernel)
img_adaptive_median = adaptive_median_denoise(img_ori)plt.figure(figsize=(15, 10))plt.subplot(231), plt.imshow(img_ori, 'gray'), plt.title('With Gaussian noise'), plt.xticks([]),plt.yticks([])
plt.subplot(232), plt.imshow(img_arithmentic_mean, 'gray'), plt.title('Arithmentic mean'), plt.xticks([]),plt.yticks([])
plt.subplot(233), plt.imshow(img_adaptive_median, 'gray'), plt.title('Adaptive median'), plt.xticks([]),plt.yticks([])
plt.tight_layout()
plt.show()





 - 圖像復原與重建12 - 空間濾波 - 使用頻率域濾波降低周期噪聲 - 陷波濾波、最優陷波濾波)






 - 圖像復原與重建13 - 空間濾波 - 線性位置不變退化 - 退化函數估計、運動模糊函數)



 - 圖像復原與重建14 - 逆濾波)
窗體全屏顯示)
