由于本人在工業自動化行業做機器視覺的工作,所以除了圖像處理方面要掌握外,還需要與工業機器人進行通信。最近學習了計算機與川崎機器人的TCP/IP通信,于是在這里記錄一下。
除了直接與機器人通信外,有一種方式是通過PLC間接通信,附上我的另一篇文章,講c#與三菱PLC通信的:C#與三菱PLC通信
首先假設一個簡單的應用情況,有一臺帶相機的工業機器人,需要在機器人移動到某位置時,發出信號,然后視覺系統拍照并處理,最后將返回信號發送回機器人。這個程序就是以這個應用為基礎寫的。下圖是機器人示教器上的程序:移動到P1點后,給計算機發送拍照信號photo=1,然后計算機處理后返回over=1,機器人收到后移動到P2點。
圖片2

機器人示教器上面的程序十分簡單,然后說明計算機上的程序。
首先是建立計算機與機器人的TCP鏈接,這里以計算機為客戶端,機器人為服務端。
- public?void?ConnectRobot()//鏈接tcp??
- ????????{??
- ????????????byte[]?data?=?new?byte[1024];??
- ????????????newclient_Client?=?new?Socket(AddressFamily.InterNetwork,?SocketType.Stream,?ProtocolType.Tcp);??
- ????????????string?ipadd?=?"192.168.30.238";//機器人IP地址??
- ????????????int?port?=?Convert.ToInt32("23");//端口號??
- ????????????IPEndPoint?ie?=?new?IPEndPoint(IPAddress.Parse(ipadd),?port);??
- ????????????try??
- ????????????{??
- ????????????????newclient_Client.Connect(ie);//建立連接??
- ????????????????Connected_Client?=?true;//連接標志位???????????
- ????????????????btnConn.Enabled?=?false;??
- ????????????????sendToRobot("as\r\n");//建立連接后,首先發送as,則可以通過計算機發送as語言指令??
- ????????????????SetTishi("機器人鏈接成功...");//顯示??
- ??
- ??
- ????????????}??
- ????????????catch?(SocketException?e)??
- ????????????{??
- ????????????????SetTishi("連接機器人失敗??"?+?e.Message);??
- ????????????????return;??
- ????????????}??
- <span?style="white-space:pre;">?????</span>//用于監聽機器人是否發送數據??
- ????????????ThreadStart?myThreaddelegate?=?new?ThreadStart(ReceiveMsg);??
- ????????????myThread_client?=?new?Thread(myThreaddelegate);??
- ????????????myThread_client.Start();??
- ??
- ??
- ????????}??
TCP通信的基本知識不在這里講,這里要說明的是connect后為什么有一句向機器人發送“as”。在川崎機器人E系列TCP/IP通信手冊中,有如下內容:
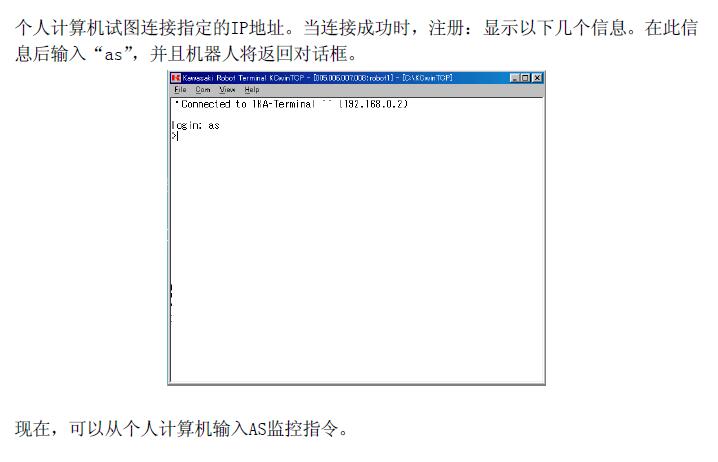
即,在connect后首先向機器人發送"as"后,可以直接從計算機發送機器人的AS語言指令。這樣,就可以實現從計算機上對機器人程序進行控制。
建立連接后,要做的就是收發信息了。計算機向機器人發信息很簡單,因為計算機可以向機器人發送as語言指令,所以就是簡單的TCP發送消息就可以了,如直接發送“over=1”,機器人就可以獲取得到了。需要說的是機器人向計算機發送消息,在本程序中沒有采用在機器人中建立TCP服務器然后監聽的方法,而是在計算機中實現該功能。本方法利用的是川崎機器人as語言中的list指令,list指令的功能是顯示所有程序步驟和變量,而要查詢變量photo的值,只需要向機器人發送“list/r photo”,這樣就可以得到變量photo的值。這樣就可以通過計算機端不斷查詢,達到了機器人發送數據的效果,從而簡化了機器人程序,復雜性降低。以下是監聽代碼:
?
- public?void?ReceiveMsg()//監聽tcp??
- ????????{??
- ??
- ????????????int?thelastData?=?999;??
- ????????????while?(true)??
- ????????????{??
- ????????????????try??
- ????????????????{??
- ??
- ????????????????????byte[]?data?=?new?byte[1024];??
- ????????????????????int?recv?=?newclient_Client.Receive(data);//接收消息??
- ????????????????????string?stringdata?=?Encoding.UTF8.GetString(data,?0,?recv);//將bytes轉換為字符??
- ????????????????????//string?stringdata?=?Encoding.Unicode.GetString(data,?0,?recv);??
- ????????????????????if?(stringdata?==?"")//判斷是否斷開連接??
- ????????????????????{??
- ????????????????????????SetTishi("服務器已退出");??
- ????????????????????????newclient_Client.Close();??
- ????????????????????????Connected_Client?=?false;??
- ????????????????????????break;??
- ????????????????????}??
- ????????????????????//利用AS語言的檢測變量的指令list實現監聽功能??
- ????????????????????//因為發送‘list/r?photo’監測變量photo的值返回的還有其它字符,所以要去掉這些字符??
- ????????????????????stringdata?=?stringdata.Trim();??
- ????????????????????string?strTemp?=?"photo????=";??
- ????????????????????int?iCount?=?stringdata.IndexOf(strTemp);//得到多余字符的長度??
- ????????????????????if?(iCount?>?0)??
- ????????????????????{??
- ????????????????????????string?read?=?stringdata.Substring(strTemp.Length?+?iCount?+?1,?2);//去掉多余字符以及photo??
- ????????????????????????int?kk?=?int.Parse(read);//得到變量photo的值??
- ????????????????????????if?(kk?!=?0)??
- ????????????????????????{??
- ??
- ????????????????????????????if?(thelastData?!=?kk)//信號從0->1才認為收到信號??
- ????????????????????????????{??
- ????????????????????????????????SetTishi("接收到機器人拍照信號...");??
- ????????????????????????????????sendToRobot("over=1\r\n");//給機器人完成信號??
- ????????????????????????????????SetTishi("接收到消息:"?+?stringdata);??
- ????????????????????????????}??
- ????????????????????????}??
- ????????????????????????thelastData?=?kk;??
- ????????????????????}??
- ????????????????}??
- ????????????????catch??
- ????????????????{??
- ??
- ????????????????}??
- ????????????????sendToRobot("list/R?photo\r\n");//向機器人發送as語言的指令,查詢photo的值??
- ????????????????Thread.Sleep(100);??
- ??
- ????????????}??
- ????????}??
通過不斷向機器人獲取變量photo的值,當檢測到photo=1時,就可以向機器人發送完成信號over=1,然后機器人程序往下執行。





_方法和數組——數組)


)


)







)