(1)門級電路的功耗優化綜述
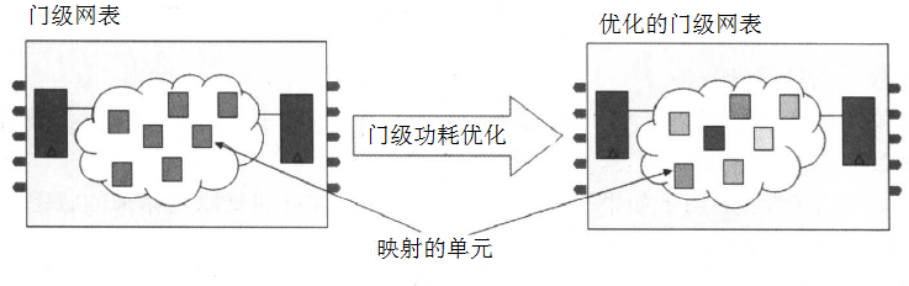
門級電路的功耗優化(Gate Level Power Optimization,簡稱GLPO)是從已經映射的門級網表開始,對設計進行功耗的優化以滿足功耗的約束,同時設計保持其性能,即滿足設計規則和時序的要求。功耗優化前的設計是已經映射到工藝庫的電路,如下圖所示:
? 
門級電路的功耗優化包括了設計總功耗,動態功耗以及漏電功耗的優化。對設計做優化時,優化的優先次序如下:
? 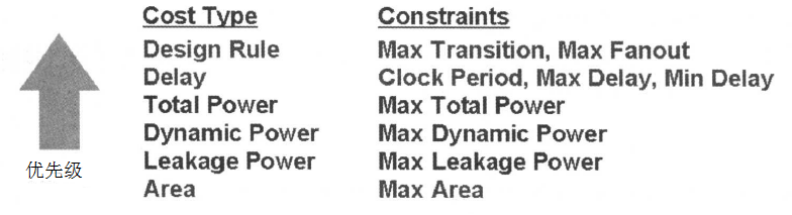
由此我們可以找到, 優化時,所產生的電路首先要滿足設計規則的要求,然后滿足延遲(時序)約束的要求,在滿足時序性能要求的基礎上,進行總功耗的優化,再進行動態功耗的優化和漏電功耗的優化,最后對面積進行優化。
優化時先滿足更高級優先權的約束。進行低級優先權約束的優化不能以犧牲更高優先權的約束為代價。功耗的優化不能降低設計的時序。為了有效地進行功耗優化,需要設計中有正的時間冗余(timing slacks)。功耗的減少以時序路徑的正時間冗余作為交換,即功耗優化時會減少時序路徑上的正的時間冗余。因此,設計中正的時間冗余越多,就越有潛力降低功耗。
通過上面的描述,對門級功耗優化有了一下了解之后,這里先介紹一下靜態功耗優化的方法——多閾值電壓設計,然后介紹基于EDA工具的動態功耗的優化,接著介紹總體功耗的優化;在最后介紹一種常用的門級低功耗的方法——電源門控。電源門控我放在明天發表,今天的內容主要就是圍繞靜態、動態、總功耗來寫。
?
(2)多閾值電壓設計
①多閾值電壓設計原理
由于半導體工藝越來越先進,半導體器件的幾何尺寸越來越小,器件中的晶體管(門)數越來越多,器件的供電電壓越來越低,單元門的閾值電壓越來越低。由于單位面積中的單元門越來越多,功耗密度高,器件的功耗大。因此,設計時,我們要對功耗進行優化和管理。在90nm或以下的工藝,靜態功耗要占整個設計功耗的20%以上。因此,使用超深亞微米工藝時,除了要降低動態功耗,還要降低靜態功耗。在超深亞微米工藝,單元門的閾值電壓和漏電功耗(靜態功耗)有如下圖所示的關系:
? 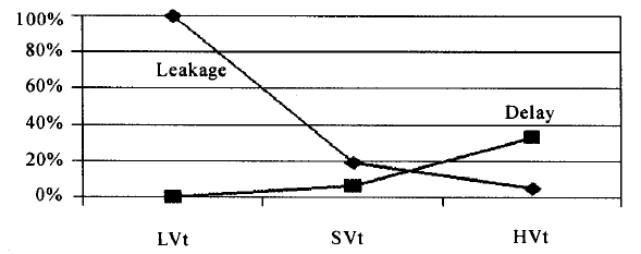
由圖可見,閾值電壓Vt以指數關系影響著漏電功耗。閾值電壓Vt與漏電功耗和單元門延遲有如下關系:
閾值電壓Vt越高的單元,它的漏電功耗越低,但門延遲越長,也就是速度慢;
閾值電壓Vt越低的單元,它的漏電功耗越高,但門延遲越短,也就是速度快。
我們可以利用多閾值電壓工藝庫的這種特點,進行漏電功耗的優化,設計靜態功耗低性能高的電路。
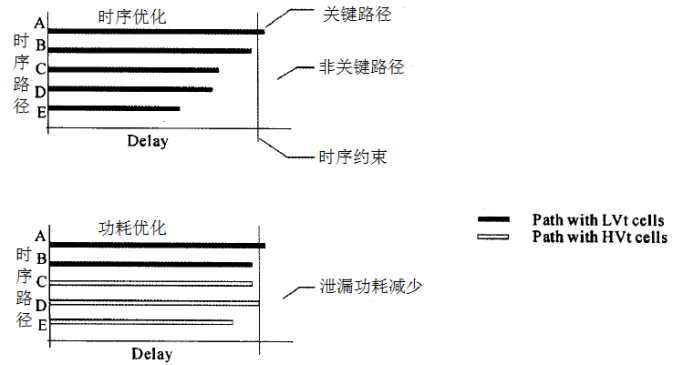
一般的設計中,一個時序路徑組((timing path group)有多條時序路徑,延遲最大的路徑稱為關鍵路徑。根據多閾值電壓單元的特點,為了滿足時序的要求,關鍵路徑中使用低閾值電壓的單元(low Vt cells),以減少單元門的延遲,改善路徑的時序。而為了減少靜態功耗,在非關鍵路徑中使用高閾值電壓的單元(high Vt cells),以降低靜態功耗。因此,使用多閾值電壓的工藝庫,我們可以設計出低靜態功耗和高性能的設計。上面的描述如下圖所示:
? 
?
?
②門級網表/RTL代碼的多閾值電壓設計
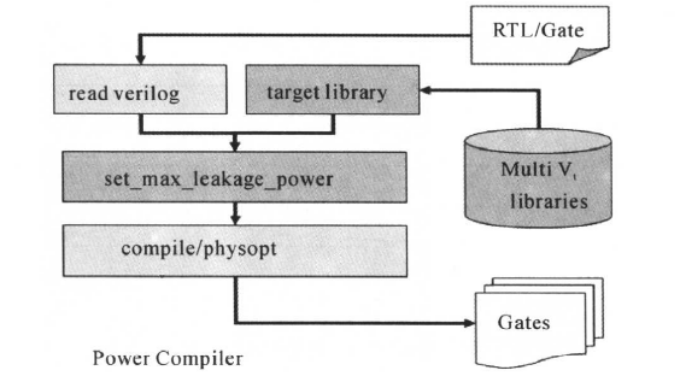
多閾值電壓設計可以在門級網表或者RTL代碼的時候就進行,也可以在后面布線后進行。門級網表/RTL代碼的多閾值電壓設計(或者說是靜態功耗優化)流程如下所示:
? 
一個對應的示例腳本如下所示:
set ??target_library ??"hvt.db ??svt.db ??lvt.db"
······
read_verilog ??mydesign.v
current_design ??top
source ??myconstraint.tcl
······
set_max_leakage ???-power ??0mw
compile
······
與以前的腳本不同,設置target_library時,我們用了多個庫。上列中,目標庫設置為 "hvt.db ??svt.db ??lvt.db"腳本中使用set_max_leakage_power命令為電路設置靜態功耗的約束。在運行compile命令時,Power Compiler將根據時序和靜態功耗的約束,在目標庫選擇合適的單元,在滿足時序約束的前提下,盡量使用Svt或Hvt單元,使優化出的設計性能高,靜態功耗低。
PS:如果在Physical Compiler工具(現在我們使用DC的拓撲模式)里做漏電功耗優化時,我們可以保留一點正的時間冗余(positive slack),使電路不會在極限的時序下工作.這些時間冗余量也可被后面其他的優化算法所使用。設置時間冗余的命令如下:
set ??physopt_power_critical_range ??時間量
?
③布線后的多閾值電壓設計
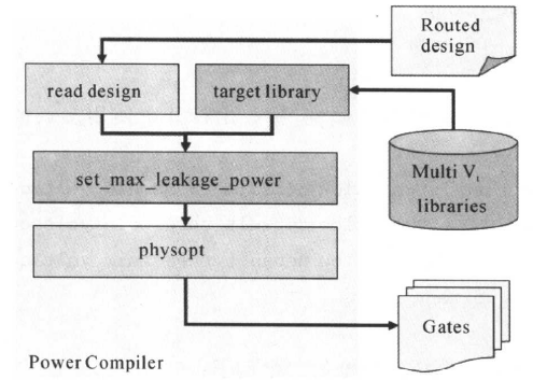
上面是門級網表/RTL代碼的多閾值電壓設計,下面簡單介紹布線后的多閾值電壓設計,流程如下圖所示:
? 
相應的一個示例腳本如下所示:
set ??target_library ??"hvt.db ??svt.db ??lvt.db"
read_verilog ??routed_design.v
current_design ??top
source ???top.sdc
······
set_max_leakage ???-power ??0mw
physopt???-preserve_footprint ???-only_power_recovery ?-post_route??-incremental
physopt命令中使用了“-poat_route”的選項,特別用于進行布線后的漏電功耗的優化。優化時,單元的外形名稱(footprint)保留下來,原有的布線保持不變。
?
?
④多閾值電壓設計與多閾值庫的報告
進行漏電功耗的優化時,Power Compile將報告如下的漏電優化的信息:
? 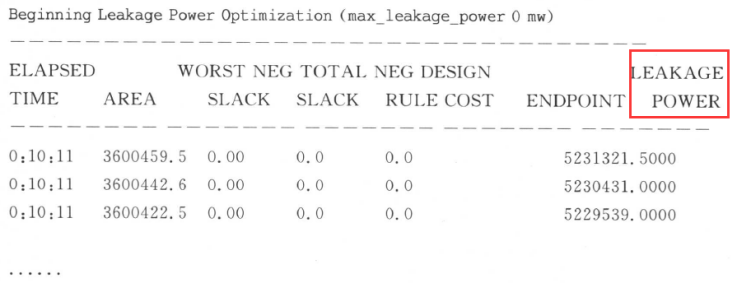
LEAKAGE POWER的列(Column)展出了內部優化的漏電成本值。它和報告出來的漏電功耗可能不一樣。我們用“report_power”命令得到功耗的準確的報告。
?======================================================================
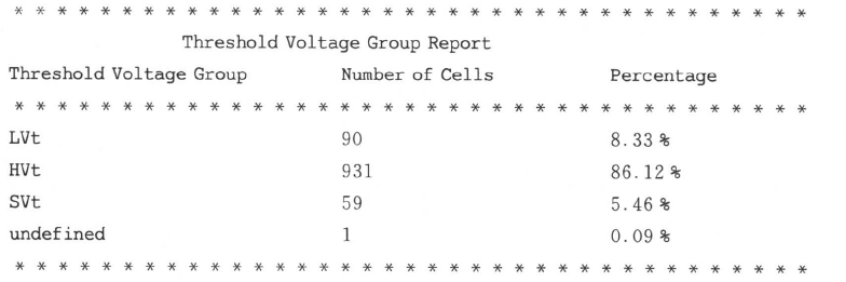
我們現在來看一下多閾值庫。多閾值庫定義了兩個屬性,一個為庫屬性:default_threshold_voltage_group,另一個為單獨庫單元的屬性:threshold_voltage_group。然后報告多閾值電壓組的命令是:report_threshold_voltage_group.我們可以使用多閾值庫的這兩個屬性,報告出設計中使用多域值庫單元的比例,一個示例的腳本如下所示:
set_attr ??-type string??lvt.db:slow??default_threshold_voltage_group ?LVt
set_attr ??-type string ?svt.db:slow ?default_threshold_voltage_group ?SVt
set_attr ??-type string ?hvt.db:slow??default_threshold_voltage-group ?HVt
report_threshold_voltage_group
報告得到的結果如下所示:
? 
?
?
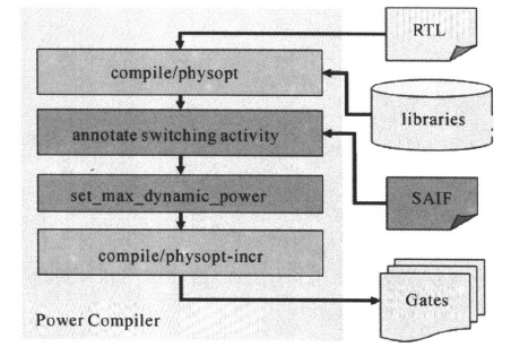
(3)基于EDA工具的動態功耗優化
前面介紹了靜態功耗的優化,下面介紹動態功耗的優化。動態功耗優化通常在做完時序優化后進行。動態功耗優化時,需要提供電路的開關行為,工具根據每個節點的翻轉率,來優化整個電路的動態功耗。用compile/physopt命令可以同時對時序和功耗做優化。設置動態功耗的命令為:
set_max_dynamic_power ?xxmw.(一般設置為0)
動態功耗優化的流程如下所示:
? 
一個對應的示例腳本如下所示:
read_verilog ??top.v
source ??constraints.tcl
set ??target_library ??"tech.db"
compile
read_saif
set_ max_dynamic_power ??0 mw
compile ?-inc
動態功耗的優化的實現如上面所示。優化過程用了很多技術比如插入緩沖器、相位分配之類的。由于這些都是power compiler在背后自動實現(或者說是進行低功耗優化時工具使用的原理),不需要我們進行設置,因此這里不進行介紹。
?
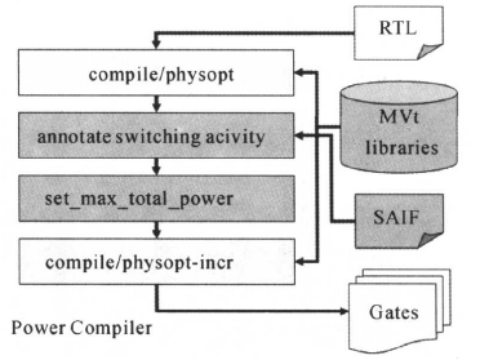
(4)總體功耗優化
前面分別介紹了靜態功耗和動態功耗的優化方法。我們可以把它們結合在一起,進行整個設計總功耗的優化。總功耗是動態功耗和靜態功耗的和,總功耗的優先級比動態功耗和靜態功耗高。總功耗優化時,工具盡量減少動態功耗和靜態功耗的和。優化時如果減少了漏電功耗增加了動態功耗,但它們的和減少了,優化是有效的。反之亦然。我們可以通過設置開關,使動態功耗優化和靜態功耗優化用不同的努力級別(effort levels)和權重(weights)進行優化。
總功耗的優化流程如下圖所示:
? 
一個對應的示例腳本如下所示:
read_verilog ???top.v
source ????constraints.tcl
set ??target_library ??"hvt.db svt.db lvt.db"
······
compile
read_saif
set_max_total_power ?0 ?mw ?-leakage_weight ??30
compile ??-inc
······
腳本中,target_library設置為多閾值電壓的庫,用于做靜態功耗的優化。讀入含有開關行為的saif文件,用于約束動態功耗的優化。在設置總功耗的約束時,我們可以在set_max_total_power命令中使用靜態或/和動態功耗權重(weight)的選項,使工具在優化時,偏重于靜態或動態功耗。假設P、Pd和Pl分別為總功耗、動態功耗和靜態功耗,Wd和Wl分別為動態功耗和靜態功耗的權重,則
總功耗P = (Wd*Pd+Wl*P1)/Wd
我們可以在DC或PC中設定只對功耗做優化。這時候,工具僅優化設計的功耗,而不會對更高優先級的約束做任何的優化和修正設計規則DRC違例。但是這種優化也不會使設計的更高優先級約束的性能變差和引起DRC違例。這種優化的優點在于運行時間較短,可用于優化設計的動態功耗、靜態功耗和總功耗。在DC和PC中,只能以增量編輯的形式工作。
PC中只對功耗做優化的命令如下:
set_max_total ??-power ?0 ?mw
physopt ???-only_power_recovery
DC中只對功耗做優化的命令如下(由于現在PC在DC中,因此下面的腳本更常用):
set ??compile_power_opto_only ??true
set_max_leakage_power ?0 ?mw
compile ?-inc
現在來記錄一下門級層次(有點書也說是在系統級)常用的一種低功耗方法——電源門控。
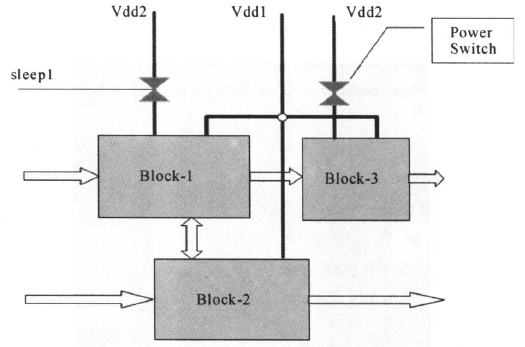
①電源門控概述與原理
電源門控是指芯片中某個區域的供電電源被關掉,即該區域內的邏輯電路的供電電源斷開。電源門控(Power Gating)的設計如下圖所示:
? 
?
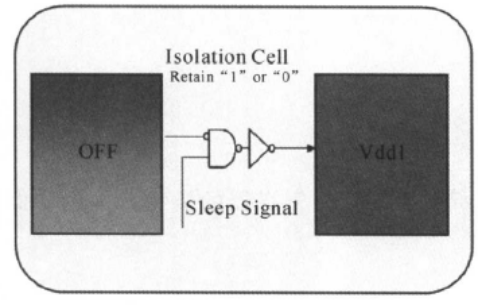
如果某一模塊在一段時間內不工作,可以關掉它的供電電源(關掉供電電源可以使用MTCMOS開關,通常在使用后端工具進行布局布線時加入MTCMOS,這屬于后端知識,這里不進行介紹)。斷電后,設計進入睡眠模式,其漏電功率很小。喚醒時,為了使模塊盡快恢復工作模式,需要保持關電前的狀態。保持寄存器(retention ?register)可用于記憶狀態。使用保持寄存器設計電源門控如下圖所示:
? 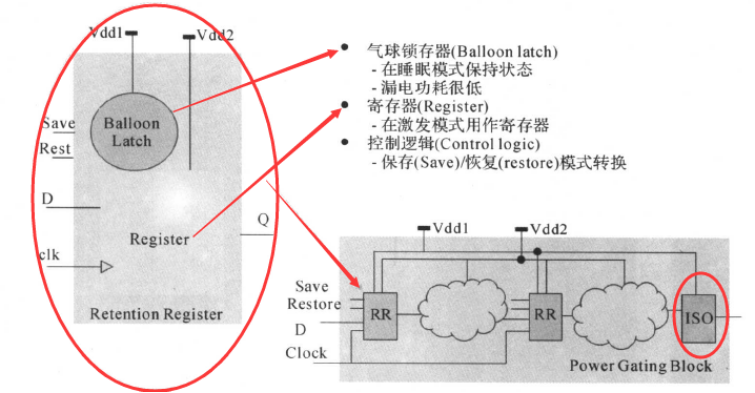
下面來解釋一下上面的設計:
·在睡眠模式,寄存器的電源Vdd2被切斷,因此它的漏電功耗極小;這時候僅僅保持鎖存器處于工作狀態,寄存器的值保留在鎖存器里。由于鎖存器是用高閾值電壓的晶體管組成,漏電功耗很低。
·當Restore信號被激活時,寄存器的電源Vdd2被加上,保留在鎖存器里的值被載入到寄存器。寄存器在工作(活躍)狀態時,它作為一般的寄存器工作。Save/Restore引腳也稱為電源門控引腳(power gating pins),它們被用于把電路置于適當的模式。
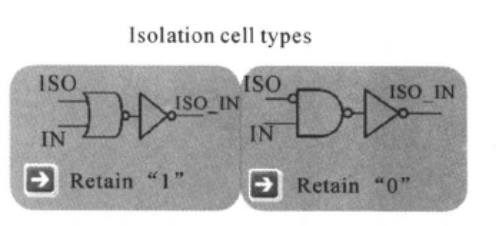
·電源門控模塊的輸出端需要使用隔離單元(Isolation Cell)(我們在前面講過),因為在睡眠模式時,模塊的輸出為不確定值。為了保證在睡眠模式時,下一級的輸入不會懸空,插入隔離單元,提供一個"1”或”0”的輸出,使下一級的輸入為確定的邏輯值,如下所示:
? 
ISO為睡眠控制信號,用于控制隔離單元的運作。電路在正常工作模式時,ISO=0,ISO_ IN=IN。電路在睡眠模式時,ISO=1時,如果使用下面左圖的單元作為隔離單元,輸出邏輯為“1";如使用下面右圖的單元作為隔離單元,則輸出邏輯為“0":
? 
?
?
②工藝庫中的電源門控單元
進行電源門控設計,需要用綜合庫的支持。綜合庫中的電源門控單元的庫模型如下所示:
? 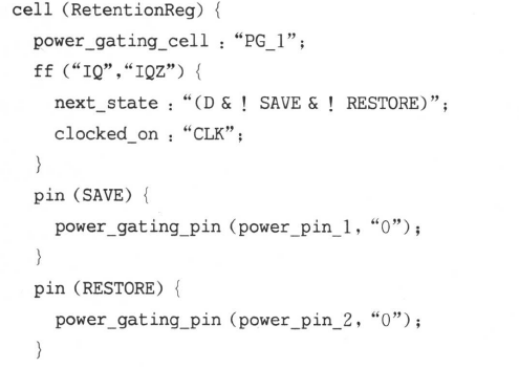
下面是庫模型的部分解釋:
·單元級屬性(Cell level attribute)
power_gating_cell:"type","type”不可以是“none”或空字符,它鑒別所描述的保持寄存器的類型。本例中保持寄存器的類型為PG_1。
·電源門控寄存器的功能描述
 它是保持寄存器在活躍模式的功能。
它是保持寄存器在活躍模式的功能。
·引腳級的屬性(Pin level attribute)
 power_pin_1~ power_pin_5列出了現有的電源門控信號的名字。例如,power_pin_1可以用于定義為睡眠(sleep)信號,power_pin_2可以用于定義叫醒(wake)信號。power_pin_[1-5]信號的默認值是寄存器處于非工作(disable)狀況的值,可以是“0”或“1"。例如,如果當power_pin_1的邏輯值為“1”時,電路進入睡眠模式,那么,其非工作(disable)狀況的值應該是邏輯“0”。
power_pin_1~ power_pin_5列出了現有的電源門控信號的名字。例如,power_pin_1可以用于定義為睡眠(sleep)信號,power_pin_2可以用于定義叫醒(wake)信號。power_pin_[1-5]信號的默認值是寄存器處于非工作(disable)狀況的值,可以是“0”或“1"。例如,如果當power_pin_1的邏輯值為“1”時,電路進入睡眠模式,那么,其非工作(disable)狀況的值應該是邏輯“0”。
?
③電源門控設計流程
了解了電源門控的原理和綜合庫的電源門控單元,下面我們就來介紹電源門控的設計流程。使用電源門控的設計流程和相應的腳本如下所示:
? 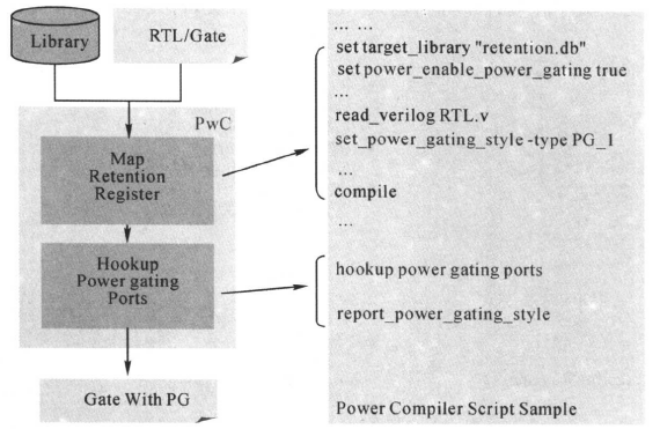
下面進行解釋一下部分命令:
·腳本中使用set_power_gating_style命令來映射保持寄存器。例如對于下面的代碼
······
always@ (posedge clk) ?begin:sub_block_1
??g=d;
end
······
set_power_gating ?-style ?-type ??PG_1 ?-hdl_block ??sub_block_1命令可以把代碼中的寄存器映射為保持寄存器。選項“-type PG_1”指定使用庫中類型為PG_1的保持寄存器。選項“-hdl_block ??sub_block_1”指定把RTL代碼中進程(process)名為“sub_block_1"中的所有寄存器用類型為PCG_ 1的保持寄存器代替。
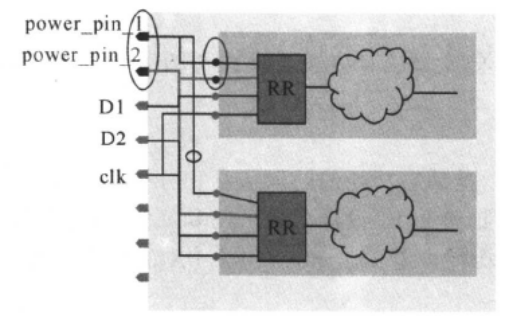
· 腳本中使用hookup_power_gating_ports命令來自動插入power_pin[1-5]端口和層次模塊的引腳。同類功耗引腳的端口或引腳會被連接在一起。例如屬性同為“power_pin_1”的引腳將被連接在一起,其默認名為“power_pin_1"。下圖為執行hookup_power_gating_ports命令后設計中插入端口和層次模塊的引腳。我們可以使用選項“-default_port_naming_style”和“-port_naming_styles”來改變端口和/或層次模塊引腳的命名:
? 
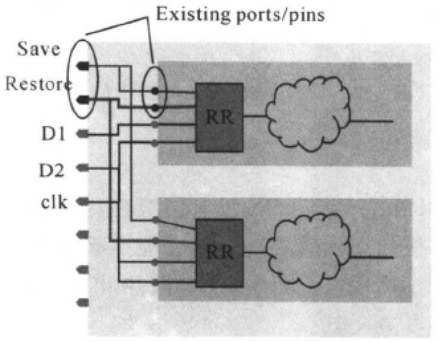
下面的腳本用set_power_gating_signal命令指定把電源門控引腳與現有的端口或層次引腳連接起來,如下所示:
set_power_gating_signal ?-power_pin_index ?1 ?[get_ports ?Save]
set_power_gating_signal ?-power_pin_index ?2 ?[get_pins ?A/p1]
······
hookup_power_gating_ports
結果如下所示:
? 
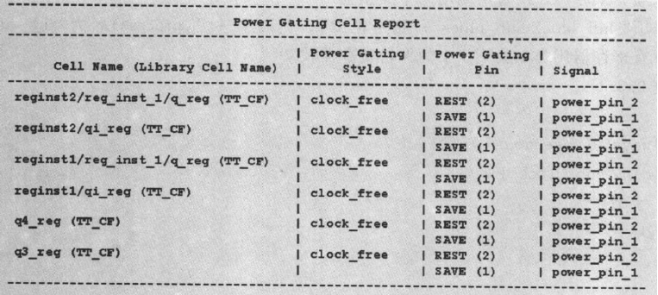
·最后,我們可以用report_power_gating命令報告設計中的電源門控單元,如下所示:
? 






)


的使用)







)

