為什么需要九點標定?
為了得到機械和相機的關系,就好比人的手和眼的關系。我們用手將一個物體放到空間的一個位置,用眼看到這個物體,這也存在兩個坐標系,一個是手所在的運動空間的坐標系,一個是視網膜上成像的二維平面坐標系。我們用眼看到一個物體,用手去拿,之所以能夠準確地拿到這個物體,是因為我們的神經系統把這兩個坐標系準確地關聯好了。機械和視覺系統也是這樣,相機對工作空間中的物體進行拍照,機械手要想準確地取到這個物體,就必須首先把機械坐標系和視覺坐標系進行準確地關聯。
九點標定的基本原理:
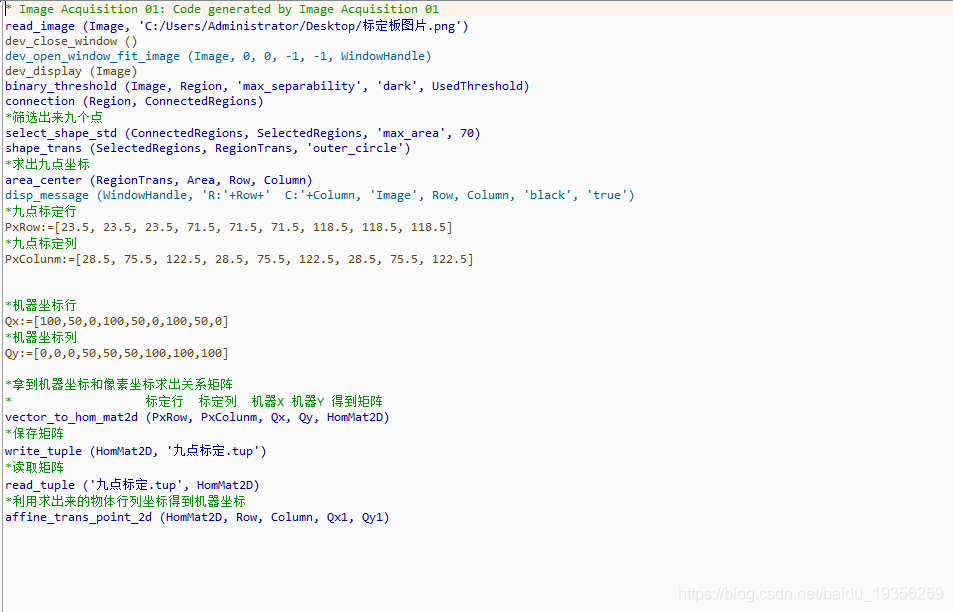
使用機械手將物體放在工作空間中的9個位置,分別用相機進行拍照,取得9個點的機械坐標和像素坐標,然后用Halcon提供的求得仿射矩陣HomMat2D
眼在外:相機放置一個固定的位置,與機器人基坐標系相對位置不變
眼在手:相機和機器手綁定在一個位置,機器手移動,相機也跟著移動
?
一、眼在手外
?
二、眼在手上






:TP5.0視圖和模板)

)











)