Optimization
?
隨機梯度下降(SGD):

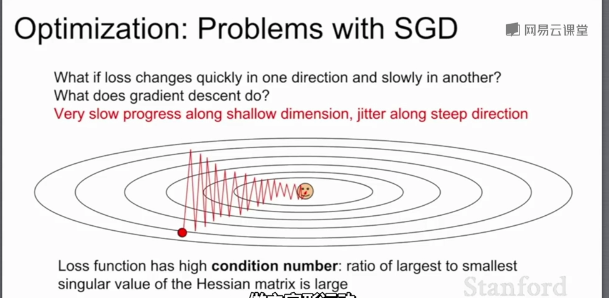
當損失函數在一個方向很敏感在另一個方向不敏感時,會產生上面的問題,紅色的點以“Z”字形梯度下降,而不是以最短距離下降;這種情況在高維空間更加普遍。
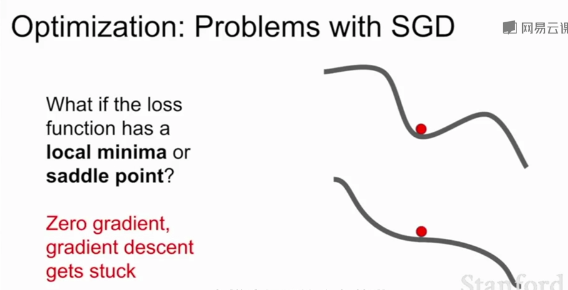
SGD的另一個問題:損失函數容易卡在局部最優或鞍點(梯度為0)不再更新。在高維空間鞍點更加普遍
?
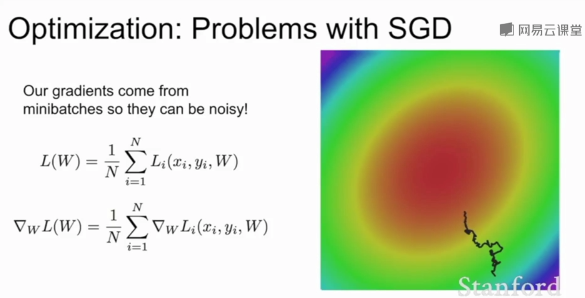
當模型較大時SGD耗費龐大計算量,添加隨機均勻噪聲時SGD需要花費大量的時間才能找到極小值。
?
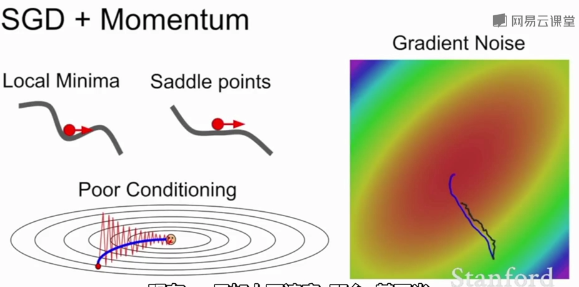
SGD+Momentum:
帶動量的SGD,基本思想是:保持一個不隨時間變化的速度,并將梯度估計添加到這個速度上,在這個速度方向上前進,而不是隨梯度變化方向,給一個摩擦系數作為這個速度的衰減項。

?
這種方法解決了局部極小值和鞍點問題,盡管在局部極小值和鞍點任會有朝預定速度方向步進,且速度會隨著時間的速度增加。
?
普通的Momentum更新是先估計當前梯度向量,取其和速度向量的和的方向作為真實參數更新的方向
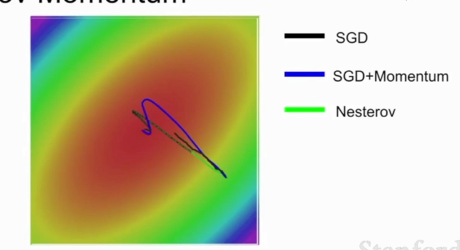
Nesterov Momentum則相反,先取得速度方向的步進,再估計當前位置的梯度,隨后回到原來位置,再根據兩者的和作為真實參數更新的方向。在凸優化問題有良好表現

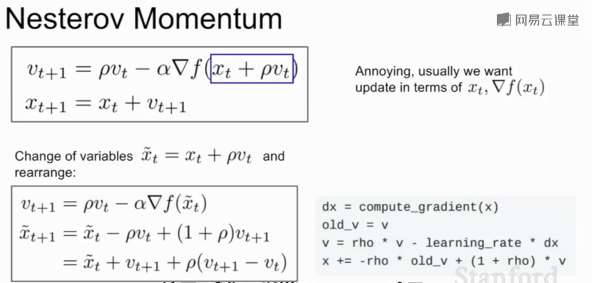
?Nesterov Momentum不會劇烈的越過局部最小值
?
?
?AdaGrad:
?在優化過程中,需要保持一個在訓練過程中的每一步的梯度的平方和的持續估計;與速度項不同,梯度平方項在訓練時,會一直累加當前梯度的平方到這個梯度平方項,在更新參數向量時,會除以這個梯度平方項。
?
?當一個維度上的梯度更新很小時會除以很小的平方項,梯度很大時則會除以很大的平方項;在一個維度上(梯度下降很慢的)訓練會加快,在另一個維度方向上訓練減慢;讓各個參數得到相同程度的收斂。
隨著時間的推移,梯度更新的步長會越來越小(梯度平方項隨時間單調遞增);在學習目標是一個凸函數的情況下,效果很好,到達極值點,步長越來越小最終收斂;非凸函數則會變得復雜
?
?
?RMSProp:
?不僅加上平方項,并讓平方梯度按照一定比率下降,然后用1減去衰減了乘以梯度平方加上之前的結果。
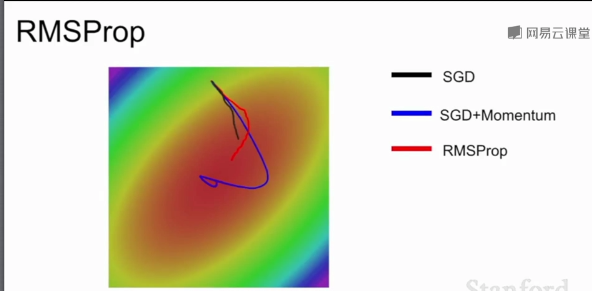
隨著訓練的進行,步長會有一個良好的性質,與AdaGrad類似在一個維度上(梯度下降很慢的)訓練會加快,在另一個維度方向上訓練減慢,RMSProp讓梯度平方衰減了,可能會造成訓練一直在變慢。
?
?RMSProp會慢慢調整梯度更新方向,SGD效果不好,SGD+Momentum會先繞過極小值再朝極小值方向前進,AdaGrad在較小學習率時可能會卡住。(凸優化問題)
?
?
?Adam:
更新第一動量(類似SGD+Momentum中的速度)和第二動量(類似AdaGrad、RMSProp中的梯度的平方項)的估計值,第一動量的估計值等于梯度的加權和,第二動量的動態估計值是梯度平方的動態估計值,相當于速度項與梯度平方項的結合。
?
?在最初的第一步,第二動量的初始值為0,第一步之后衰減值beta2=0.9或0.99,第二動量還是接近于0,除以第二動量后會得到很大的步長,可能導致初始化到一個難以收斂的區域。1e-7為的是分母不為0。
?因此,Adam增加了一個偏置校正項避免出現開始時得到很大步長。
?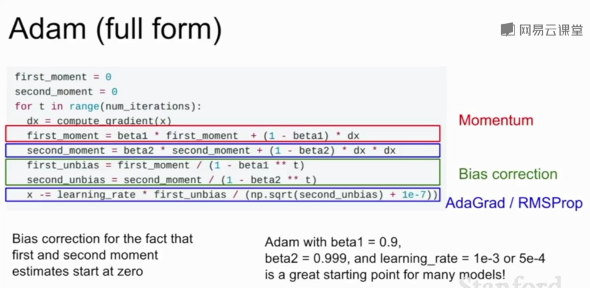
?一般網絡的都會使用Adam算法作為優化算法,它結合了SGD和RMSProp的優點。

?
?學習率的選擇:

?一般選擇學習率衰減策略,在訓練的開始選擇較大的學習率,然后隨著步長衰減或指數衰減。
?
?SGD+Momentum的學習率衰減很常見,Adam一般不使用學習率衰減,學習率衰減相當于二階超參數,在開始時不使用,在訓練達到一定瓶頸時再考慮使用。
?
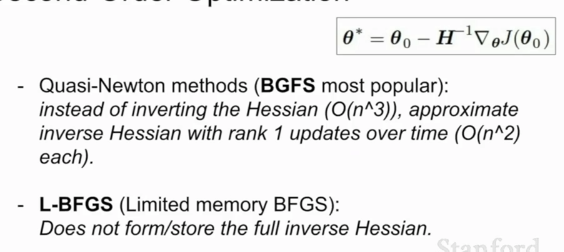
?一階優化與二階優化:
?

?
?
L-BFGS是一個二階優化器
?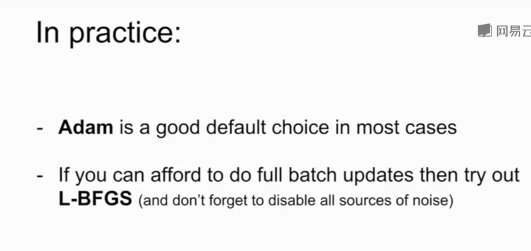
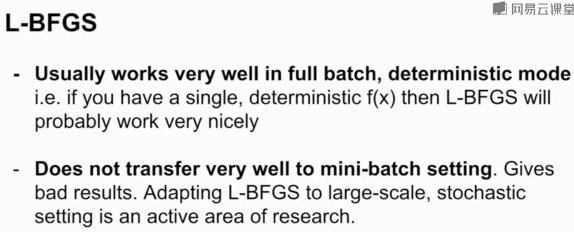
?Adam是大多數情況下的默認選擇,如果能承受整個批次的更新且沒有很多隨機性(如風格遷移),可以考慮L-BFGS
?
模型集成是提高測試集準確率的有效辦法,通常選擇一批不同的隨機初始值上訓練N個模型,測試時平均N個模型的結果,能夠緩解過擬合。

?
?
Q1:隨機梯度下降的隨機指得是什么?
Q2:嘗試解釋為什么Adam通常會是一個更好的選擇?(可以結合Momentum和RMSProb的優點解釋)
?
1.隨機梯度下降指的是從批量樣本中隨機選取一個樣本,按照該樣本梯度下降的方向進行梯度下降,
2.Adam的優點:可以解決局部最優和鞍點問題,且下降速度較快,平衡各特征梯度的大小
?
https://blog.csdn.net/weixin_40170902/article/details/80092628


)
)
)


)


)
)

)
之間的地表距離)

)


)