CLIP的github鏈接:https://github.com/openai/CLIP
CLIP
Blog,Paper,Model Card,Colab
CLIP(對比語言-圖像預訓練)是一個在各種(圖像、文本)對上進行訓練的神經網絡。可以用自然語言指示它在給定圖像的情況下預測最相關的文本片段,而無需直接對任務進行優化,這與 GPT-2 和 3 的零鏡頭功能類似。我們發現,CLIP 無需使用任何 128 萬個原始標注示例,就能在 ImageNet "零拍攝 "上達到原始 ResNet50 的性能,克服了計算機視覺領域的幾大挑戰。
Usage用法
首先,安裝 PyTorch 1.7.1(或更高版本)和 torchvision,以及少量其他依賴項,然后將此 repo 作為 Python 軟件包安裝。在 CUDA GPU 機器上,完成以下步驟即可:
conda install --yes -c pytorch pytorch=1.7.1 torchvision cudatoolkit=11.0
pip install ftfy regex tqdm
pip install git+https://github.com/openai/CLIP.git
將上面的 cudatoolkit=11.0 替換為機器上相應的 CUDA 版本,如果在沒有 GPU 的機器上安裝,則替換為 cpuonly。
import torch
import clip
from PIL import Imagedevice = "cuda" if torch.cuda.is_available() else "cpu"
model, preprocess = clip.load("ViT-B/32", device=device)image = preprocess(Image.open("CLIP.png")).unsqueeze(0).to(device)
text = clip.tokenize(["a diagram", "a dog", "a cat"]).to(device)with torch.no_grad():image_features = model.encode_image(image)text_features = model.encode_text(text)logits_per_image, logits_per_text = model(image, text)probs = logits_per_image.softmax(dim=-1).cpu().numpy()print("Label probs:", probs) # prints: [[0.9927937 0.00421068 0.00299572]]
API
CLIP 模塊提供以下方法:
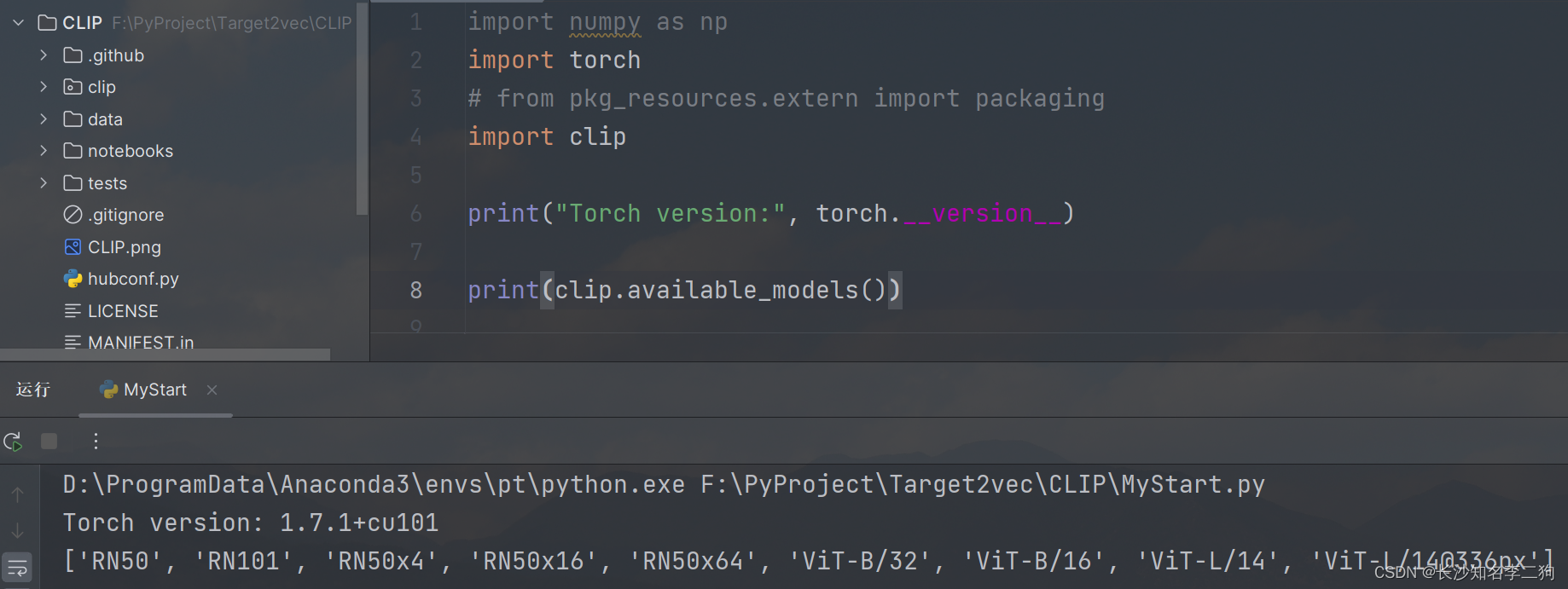
clip.available_models()
返回可用 CLIP 模型的名稱。例如下面就是我執行的結果。
clip.load(name, device=..., jit=False)
返回模型和模型所需的 TorchVision 變換(由 clip.available_models() 返回的模型名稱指定)。它將根據需要下載模型。name參數也可以是本地檢查點的路徑。
可以選擇指定運行模型的設備,默認情況下,如果有第一個 CUDA 設備,則使用該設備,否則使用 CPU。當 jit 為 False 時,將加載模型的非 JIT 版本。
clip.tokenize(text: Union[str, List[str]], context_length=77)
返回包含給定文本輸入的標記化序列的 LongTensor。這可用作模型的輸入。
clip.load() 返回的模型支持以下方法:
model.encode_image(image: Tensor)
給定一批圖像,返回 CLIP 模型視覺部分編碼的圖像特征。
model.encode_text(text: Tensor)
給定一批文本標記,返回 CLIP 模型語言部分編碼的文本特征。
model(image: Tensor, text: Tensor)
給定一批圖像和一批文本標記,返回兩個張量,其中包含與每張圖像和每個文本輸入相對應的 logit 分數。這些值是相應圖像和文本特征之間的余弦相似度乘以 100。
More Examples更多實例
Zero-Shot預測
下面的代碼使用 CLIP 執行零點預測,如論文附錄 B 所示。該示例從 CIFAR-100 數據集中獲取一張圖片,并預測數據集中 100 個文本標簽中最有可能出現的標簽。
import os
import clip
import torch
from torchvision.datasets import CIFAR100# Load the model
device = "cuda" if torch.cuda.is_available() else "cpu"
model, preprocess = clip.load('ViT-B/32', device)# Download the dataset
cifar100 = CIFAR100(root=os.path.expanduser("~/.cache"), download=True, train=False)# Prepare the inputs
image, class_id = cifar100[3637]
image_input = preprocess(image).unsqueeze(0).to(device)
text_inputs = torch.cat([clip.tokenize(f"a photo of a {c}") for c in cifar100.classes]).to(device)# Calculate features
with torch.no_grad():image_features = model.encode_image(image_input)text_features = model.encode_text(text_inputs)# Pick the top 5 most similar labels for the image
image_features /= image_features.norm(dim=-1, keepdim=True)
text_features /= text_features.norm(dim=-1, keepdim=True)
similarity = (100.0 * image_features @ text_features.T).softmax(dim=-1)
values, indices = similarity[0].topk(5)# Print the result
print("\nTop predictions:\n")
for value, index in zip(values, indices):print(f"{cifar100.classes[index]:>16s}: {100 * value.item():.2f}%")
輸出結果如下(具體數字可能因計算設備而略有不同):
Top predictions:snake: 65.31%turtle: 12.29%sweet_pepper: 3.83%lizard: 1.88%crocodile: 1.75%
請注意,本示例使用的 encode_image() 和 encode_text() 方法可返回給定輸入的編碼特征。
Linear-probe evaluation線性探針評估
下面的示例使用 scikit-learn 對圖像特征進行邏輯回歸。
import os
import clip
import torchimport numpy as np
from sklearn.linear_model import LogisticRegression
from torch.utils.data import DataLoader
from torchvision.datasets import CIFAR100
from tqdm import tqdm# Load the model
device = "cuda" if torch.cuda.is_available() else "cpu"
model, preprocess = clip.load('ViT-B/32', device)# Load the dataset
root = os.path.expanduser("~/.cache")
train = CIFAR100(root, download=True, train=True, transform=preprocess)
test = CIFAR100(root, download=True, train=False, transform=preprocess)def get_features(dataset):all_features = []all_labels = []with torch.no_grad():for images, labels in tqdm(DataLoader(dataset, batch_size=100)):features = model.encode_image(images.to(device))all_features.append(features)all_labels.append(labels)return torch.cat(all_features).cpu().numpy(), torch.cat(all_labels).cpu().numpy()# Calculate the image features
train_features, train_labels = get_features(train)
test_features, test_labels = get_features(test)# Perform logistic regression
classifier = LogisticRegression(random_state=0, C=0.316, max_iter=1000, verbose=1)
classifier.fit(train_features, train_labels)# Evaluate using the logistic regression classifier
predictions = classifier.predict(test_features)
accuracy = np.mean((test_labels == predictions).astype(float)) * 100.
print(f"Accuracy = {accuracy:.3f}")
請注意,C 值應通過使用驗證分割進行超參數掃描來確定。
See Also
OpenCLIP:包括更大的、獨立訓練的 CLIP 模型,最高可達 ViT-G/14
Hugging Face implementation of CLIP:更易于與高頻生態系統集成
語法 聲明變量及注意事項)


)








生成對抗網絡 優化算法進化算法)





)
