問題描述
在機器人學中,阻抗控制是一種常用的控制策略,用于管理機器人在與環境交互時的運動和力。阻抗控制背后的關鍵概念是將環境視為導納,而將機器人視為阻抗。
純阻抗控制接觸剛性環境時,機器人的行為方式主要受其阻抗參數的影響。這些參數包括質量(Md)、阻尼(Bd)和剛度(Kd)。
- 質量(Md):影響機器人對環境產生沖擊運動的大小。Md較大時,會對環境產生較大的沖擊,可能導致軌跡誤差較大和系統響應較慢。
- 阻尼(Bd):相當于摩擦,可以減少響應力的超調,但也會使響應變慢并增加能量消耗。
- 剛度(Kd):其作用類似于彈簧。離中心位置越遠,受到的彈力越大。Kd越小,即彈簧剛度系數越小,力控制穩態誤差越小,系統響應越慢。
在接觸剛性環境時,阻抗控制需要適當調整這些參數以達到期望的性能。通常,如果環境剛度大,那么阻抗剛度應該小一些;環境剛度小,則阻抗剛度可以大一些,這樣機器人就能表現出很好的順應性。
此外,還有兩種主要的阻抗控制方法:基于位置的阻抗控制和基于力的阻抗控制。基于位置的阻抗控制實際上也就是導納控制,而基于力的阻抗控制則是狹義上的阻抗控制。這兩種控制方法的主要區別在于它們是如何定義和控制機器人的運動和力的。
Kd=10,Bd=1
接觸位置:xd:17
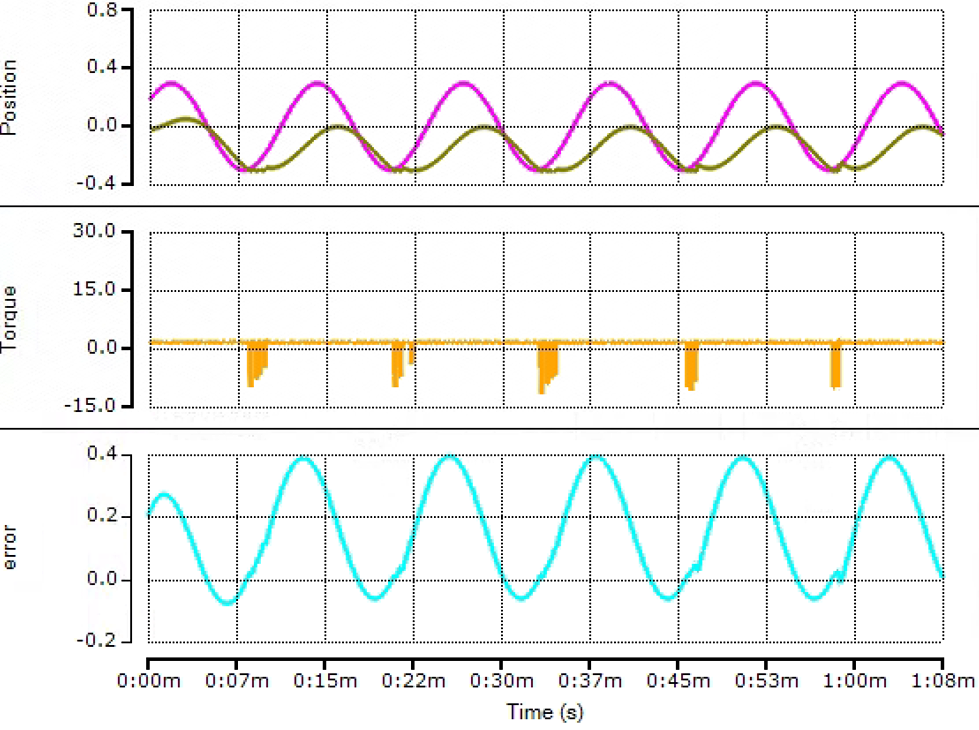
Kd=10表示期望的剛度,即機器人對外部力的響應速度和力度。較大的Kd值意味著機器人對外部力的變化會更加敏感,從而更快地適應和應對碰撞等外部擾動。
Bd=1表示期望的阻尼,即機器人對外部干擾的阻尼效果。較小的Bd值意味著機器人的狀態調整速度可能會較慢,對外界干擾的吸收和消散能力較弱。
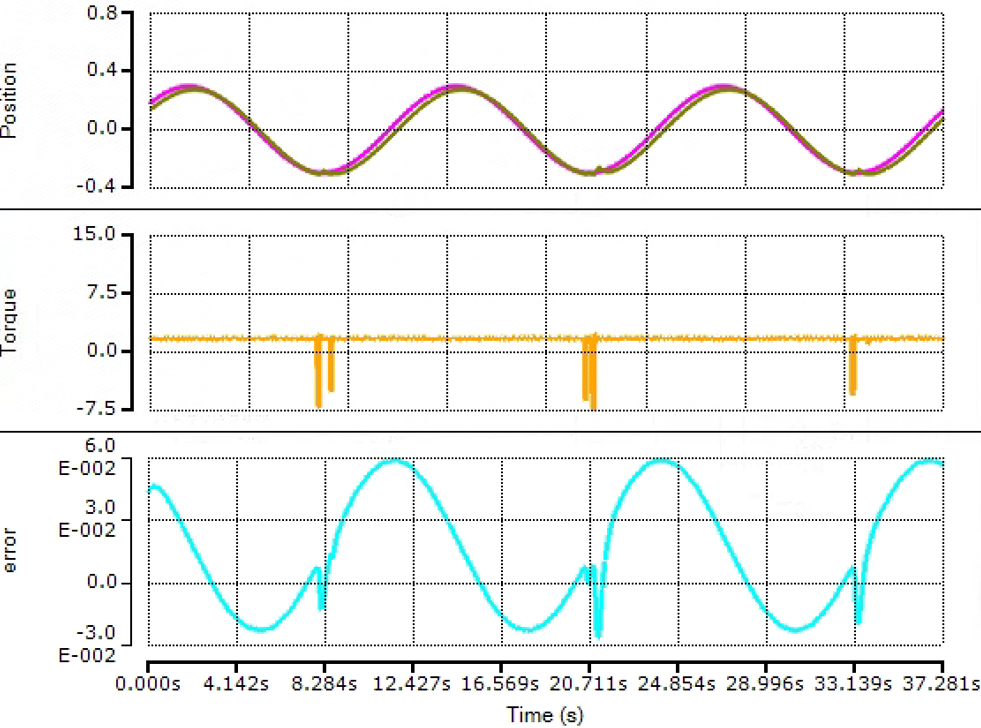
Kd=10,Bd=2
接觸位置:xd:17

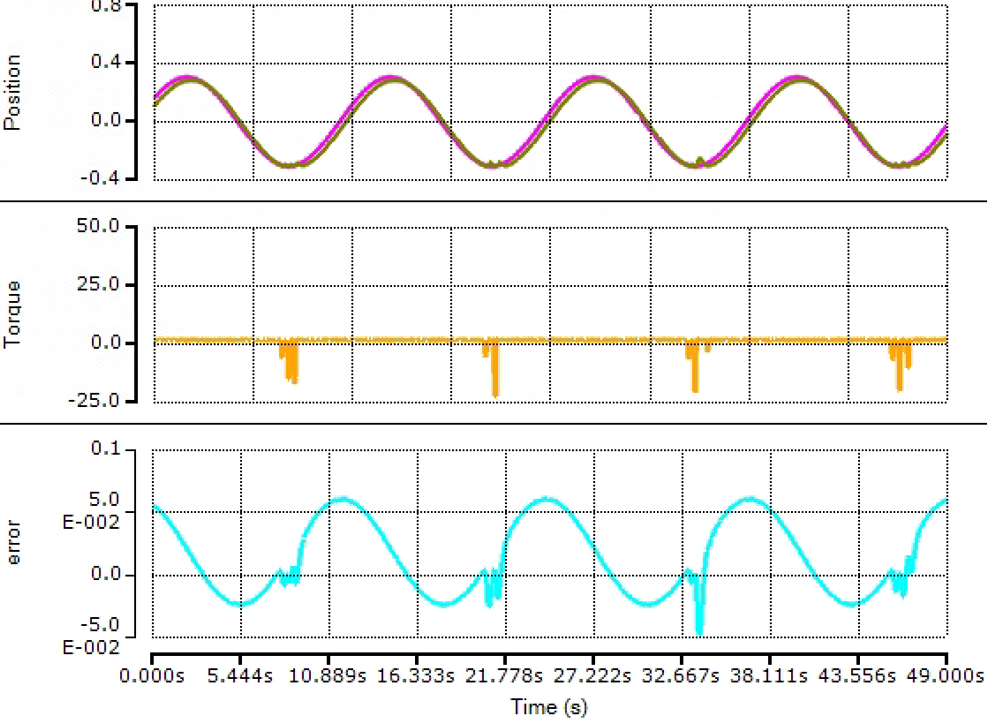
Kd=50,Bd=1
接觸位置:xd:17

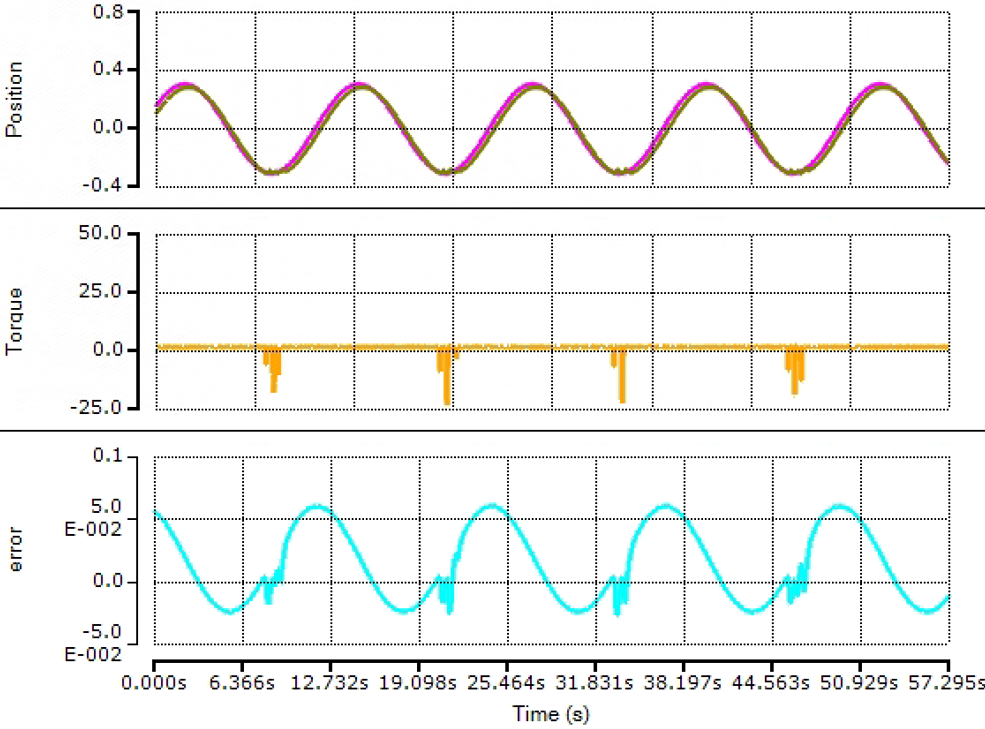
Kd=100,Bd=1
接觸位置:xd:17

Kd=100,Bd=3
接觸位置:xd:17
接觸位置:xd:17.5

Kd=100,Bd=0.1
接觸位置:xd:17.5
Kd=100,Bd=0.01
接觸位置:xd:17.5

Kd=100,Bd=0
接觸位置:xd:17.5











Spring之啟動刷新過程源碼解析)
 v9.1.1.0 綠色漢化版-供大家學習研究參考)

:表單驗證)




