在繁忙的都市生活中,我們時常對未來的科技發展充滿了好奇和期待。而近日,我有幸參加了一場引領科技潮流的線下技術沙龍,主題便是探索自動駕駛的魅力——一個讓我們身臨其境感受創新、了解技術巨擘的機會。
????????在12月2日我有幸參加了Apollo新版本Beta自動駕駛技術沙龍,此次推出的全新Beta版本更是引發了無數開發者的興奮。我驚訝于Apollo在工程框架、感知算法、規劃控制等方面的巨大升級和優化。這不僅是對自動駕駛技術的巔峰呈現,更是對未來道路上的創新探索。讓我們跟隨本次技術沙龍一起來感受一下Apollo的魅力吧!

Apollo新版本Beta自動駕駛技術沙龍
時間:12月2日(周六) 14:00-18:00
地點:北京·首鋼園·Apollo Park
一.Apollo
????????apollo是百度的自動駕駛開源框架。2017年4月19日,百度又一次展示了自動駕駛領域領導者的大氣風范,發布了一項名為“Apollo(阿波羅)”的新計劃,向汽車行業及自動駕駛領域的合作伙伴提供一個開放、完整、安全的軟件平臺,幫助他們結合車輛和硬件系統,快速搭建一套屬于自己的完整的自動駕駛系統。
????????Apollo計劃是百度在自動駕駛領域推出的開放平臺,旨在為汽車行業和自動駕駛領域的合作伙伴提供一套完整、安全、開放的軟件系統,幫助他們結合車輛和硬件系統,快速搭建一套屬于自己的完整的自動駕駛系統。
????????Apollo計劃的推出,得到了全球汽車制造商、出行服務商、科技公司和研究機構的積極響應和支持,其中包括寶馬、福特、戴姆勒、大眾、拜騰汽車等眾多知名企業。這些企業成為了Apollo合作伙伴,共同推動自動駕駛技術的發展和應用。

1.1Apollo車型進化史
百度在自動駕駛領域不斷推出新的技術和車型,隨著技術的不斷發展和創新,百度在自動駕駛領域不斷推出新的車型和進化史,展示了其在自動駕駛技術方面的領先地位和未來愿景。
- 初代“小紅”
????????2013年百度開啟自動駕駛測試計劃,為驗證自動駕駛底盤控制與高精度定位導航與感知的測試方面的技術能力,百度深度學習實驗室與北理工合作共同研發了綽號“小紅”的全地形越野車,是百度的技術驗證性產品。
- 第一代:寶馬
????????2013年,百度和德國寶馬合作研發了第一代自動駕駛車型,技術研發到產出花了大概兩年時間。這代車型,是(國內)第一款能夠駛上公開道路的車型,曾在北京五環道路上行駛。
- 第二代:奇瑞EQ&比亞迪&北汽
????????2015年底啟動合作,2016年初開始上路測試。2016年11月,奇瑞EQ比亞迪EV300、北汽EU260共同參加了在烏鎮舉辦的世界互聯網大會,18輛無人車組成的車隊接待了超過300人次嘉賓試乘,是百度最早亮相于公眾面前的自動駕駛車型,也是中國第一次無人駕駛車隊試運營
- 第三代、第四代、第五代等等一直到現在的第六代Apollo RT6。
????????Apollo RT6是百度第六代量產無人車,于2022年7月21日在百度世界大會上發布。這款車采用了貫穿一體的空間飛梭車身及銀河腰線,創新性的龍骨天窗,將車頂傳感器與天窗結構高度集成融為一體。為了進一步提升出行便利性,車輛還配置了具有識別和提示功能的靈犀交互燈語、智能電動側滑門等人性化功能。Apollo RT6具備城市復雜道路的無人駕駛能力,根據規劃,Apollo RT6會于2023年率先在蘿卜快跑上投入使用。

1.2 Apollo新版本Beta整體介紹
會議的14:30開始,就到了本次沙龍的Apollo新版本Beta整體介紹內容。
????????自2017年發布以來,Apollo開放平臺已迭代了12個版本,今天我們帶來了全新的Beta版本在Beta中,我們從在工程框架、算法和工具三個方向實現了全面升級,使得Apollo在功能上更豐富更強大,整體操作上也更靈活更易用,極大提升開發效率的同時,可幫助更多開發者快速搭建屬于自己的自動駕駛系統。
????????Apollo新版本Beta是百度自動駕駛開放平臺Apollo的最新升級版本,旨在為自動駕駛開發人員提供統一的開發工具入口和易擴展的PnC、感知軟件框架。新版本Beta聚焦于開發者擴展開發與調試體驗,基于包管理重塑了PnC、感知擴展開發模式,并推出了全新的開發者工具入口Dreamview+。
?????????Apollo新版本Beta在感知算法上也有重大升級,采用了新的激光雷達檢測模型CenterPoint,使用百度百萬級數據進行訓練,檢測精度和召回率遠超原CNNSeg模型,可以提供復雜城市道路場景下實時、準確、穩定的3D目標檢測效果。此外,新版本Beta還支持增量訓練,支持獨立自主進行模型訓練。
除了感知算法升級,Apollo新版本Beta還在LiDAR、Camera、Radar感知模型上進行了全面升級,采用了更強大的3D目標檢測模型Yolo X和Yolo 3D,檢測效果和泛化性都得到了巨大提升。同時,新版本Beta還增加了對4D毫米波的支持,障礙物檢測和天氣適應性都得到了極大增強。

????????Apollo新版本Beta還推出了Dreamview+開發者工具入口,引入模式讓多場景使用更便捷,引入面板布局讓開發者隨心自定義可視化,引入資源中心提供更豐富開發數據資源。這些功能為開發者提供了更加高效、便捷的開發體驗。
Apollo新版本Beta在開發工具、感知算法、數據資源等方面進行了全面升級,為自動駕駛開發人員提供了更加完善、易用的平臺支持。

二.Apollo新版本Beta工具技術分享
????????在本次沙龍的15:50?左右開始了本次沙龍的Apollo新版本Beta工具技術分享,這也是我最感興趣的內容,本次著重介紹一下Apollo新版本Beta工具方向的內容。
????????Apollo新版本Beta升級了感知框架與開發流程,引入了3個基于深度學習的模型,豐富了感知模型類型,并有效提升了精度。同時開放了感知的全流程開發環節,從模型的訓練、部署到驗證各個環節,開發者除了能選擇平臺自帶的模型之外,更能基于自己的需求擴展更多模型。經過本次沙龍演講人的認真講解,和會后的仔細學習,我認真總結了工具技術分享的相關內容。
2.1 Dreamview+ 新特性
Dreamview+的新版本在多個方面進行了全面提升:
1. 基于模式的多場景:通過將感知、PnC等具體開發場景作為模式分類,簡化各類模式下的操作步驟,優化使用流程,提高開發效率。
2. 基于面板的布局:支持自由配置可視化面板的布局、各面板內容以及大小,使開發者能夠創建符合自身工作流的操作界面,增加靈活性。
3. 集成云端資源中心:引入云端資源中心,使數據資源集中管理,便于快速獲取。與Studio云端資源互動更加強化,開發者可一鍵下載各類資源進行算法測試,包括地圖、場景、車輛配置和數據包等,進一步豐富開發者資源庫。
4. 新人引導與中英切換:通過可視化引導協助新開發者快速學習操作流程和步驟,降低學習和探索成本。全面支持中英文切換,降低專業術語理解難度,滿足國內外開發者的需求。
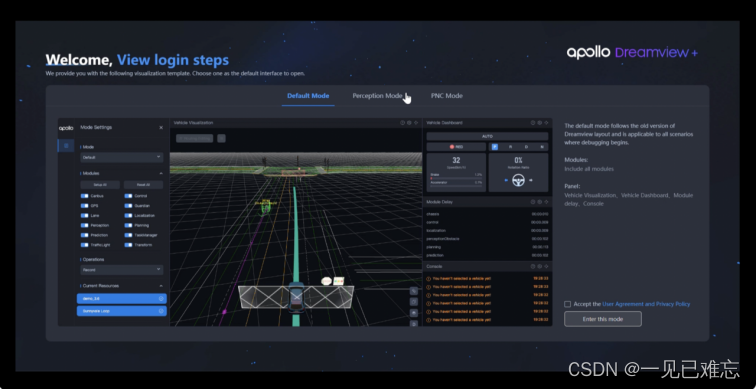
????????全新Dreamview+從感知、PnC等不同業務研發場景出發,根據不同場景的操作方式與開發流程,設計了默認模式、感知模式、PnC模式三種場景模式,開發者可以在三種模式之間隨意切換,選擇適應自身需求的模式進行自動駕駛開發,增強了場景針對性,同時極大提升了開發效率。
????????全新Dreamview+中,開發者可以自由地定義內容和布局,以適應不同的使用習慣和需求。開發者既可以通過拖拽的方式添加面板、一鍵復制和刪除面板,也可以自由設置面板的數量及位置,以及修改面板布局。這些功能使得可視化區域更加靈活和可定制化,數據可視化和數據分析更加高效。

PnC開發: 場景便捷同步、數據區域清晰
????????場景便捷同步指的是,Apollo新版本Beta提供了云端和本地的場景管理功能,開發者可以在云端或本地創建、編輯和保存場景,并方便地將場景同步到其他設備或車輛上,以便進行測試和驗證。這種同步功能可以大大提高開發效率,減少重復性工作。
????????數據區域清晰則是指,Apollo新版本Beta在數據可視化方面進行了改進,使得開發者能夠更加清晰地看到數據區域的變化和趨勢。例如,在實時仿真或實際測試過程中,開發者可以清晰地看到車輛的行駛軌跡、傳感器數據等信息,以便更好地理解車輛的行為和決策過程。這種清晰的數據可視化可以幫助開發者更好地進行算法開發和調試。

????????在8.0版本基礎上,全新Dreamview+整合了本地和云端資源,帶來了全新的資源中心。資源中心的資源類型包括地圖、場景、車輛等各類資源,通過資源中心,開發者可以更好地管理和調試資源,從而提高開發效率和系統性能。
????????在全新Dreamview+中,開發者可以使用資源中心的同步功能,將Apollo Studio云端工作臺中的數據同步到本地,包括地圖、場景、車輛配置、數據包等資源,避免了手動上傳和下載資源的麻煩。同時,Dreamview+資源中心還可以實時同步各類資源的更新狀態,以便開發人員快速地進行算法的迭代測試和調試。

Dreamview+的一些新特性包括:
- 基于模式的多場景使用:Dreamview+以具體開發場景如感知、PnC等作為模式分類,精簡了各類模式下的操作步驟,優化了使用流程,提升了開發效率。
- 基于面板的自由布局:Dreamview+支持自由配置可視化面板的布局,開發者可以根據自己的工作流創建符合自身需求的操作界面。
- 集成云端資源中心:Dreamview+集成了云端資源中心,數據資源集中,可便捷管理和迅速取用。同時進一步加強了與 Studio 云端資源的互動,可以一鍵下載各類資源用于算法測試,包括地圖、場景、車輛配置、數據包等,進一步豐富了開發者的資源庫。
????????總體來說,Dreamview+新版本全面提升了多場景使用、自由布局、數據資源、語言支持四個方面的體驗,為開發者提供了更高效、更靈活的開發工具。

2.2 自由交流/茶歇
????????在自由交流/茶歇時間,我與其他開發者熱烈討論了Apollo新版本Beta的技術升級,分享了項目經驗,探討了未來技術趨勢,促成了實際應用心得的交流,同時拓展了人脈網絡。

在技術沙龍期間,主辦方貼心地為我們準備了美味可口的水果甜點等,為參與者的體驗增添了愉悅的一筆。

2.3 沙龍參會心得
參加了Apollo新版本Beta自動駕駛技術沙龍,深感科技的前沿魅力,本次沙龍收獲很大。
- 通過參與,我深刻體會到自動駕駛技術的巔峰表現以及對未來交通和出行方式的潛在影響。這不僅是一次學習,更是一場身臨其境感受創新的機會。
- 對于Apollo新版本Beta的介紹讓我印象深刻。全新的工程框架、感知算法、規劃控制等方面的升級和優化展示了百度在自動駕駛技術上的不懈努力。特別是感知算法的重大升級,采用了新的激光雷達檢測模型CenterPoint,以及在LiDAR、Camera、Radar感知模型上的全面升級,給我留下了深刻的印象。這種技術的不斷演進使得自動駕駛系統在復雜城市道路場景下能夠實現更為準確、穩定的3D目標檢測效果。
- 此外,新版本Beta推出的Dreamview+開發者工具入口也給我帶來了新的認知。基于模式的多場景使用、基于面板的自由布局以及集成云端資源中心等新特性,為開發者提供了更高效、更靈活的開發工具。這種開發者友好的設計使得自動駕駛系統的開發變得更加直觀、便捷。
總的來說,參加這次技術沙龍讓我對自動駕駛技術有了更深入的了解,并對未來的科技發展充滿了信心。這樣的活動不僅是知識的更新,更是與科技前沿保持連接的重要途徑。期待未來能夠見證更多創新的涌現,為我們的出行方式帶來更多可能性。

覆蓋優化 - 附代碼)




)


覆蓋優化 - 附代碼)










)