五、動態規劃
基本概念
階段(Stage):將所給問題的過程,按時間或空間特征分解成若干相互聯系的階段,以便按次序去求解每階段的解,常用字母 k k k 表示。
狀態(State):各階段開始時的客觀條件叫做狀態。描述各階段狀態的變量稱為狀態變量,常用 s k s_k sk? 表示第 k k k 階段的狀態變量,狀態變量 s k s_k sk? 的取值集合稱為狀態集合,用 S k S_k Sk? 表示。狀態變量應具有無后效性:某階段狀態給定后,這個階段以后過程的發展不受這段以前各狀態的影響。
決策和策略(Decision and Policy):各階段狀態確定后,就可以作不同的決定,從而確定下一階段的狀態,這種決定稱為決策。表示決策的變量稱為決策變量,常用 u k ( s k ) u_k(s_k) uk?(sk?) 表示,允許的決策集合常用 D k ( s k ) D_k(s_k) Dk?(sk?) 表示。各階段決策確定后,整個問題的決策序列就構成一個策略。
狀態轉移方程:如果給定了第 k k k 階段的狀態 s k s_k sk? ,本階段決策為 u k ( s k ) u_k(s_k) uk?(sk?) ,則第 k + 1 k+1 k+1 階段的狀態 s k + 1 s_{k+1} sk+1? 也就完全確定,它們的關系就稱為狀態轉移方程。
指標函數:用于衡量所選定策略優劣的數量指標稱為指標函數。直接指標函數表示某階段的決策產生的效益,常用 d k ( u k ) d_k(u_k) dk?(uk?) 表示。最優指標函數表示從第 k k k 階段狀態為 s k s_k sk? 采用最優策略時,后部過程的最優收益值,常用 f k ( s k ) f_k(s_k) fk?(sk?) 表示。
五要素
動態規劃模型五要素:
- 將問題按時空特征恰當地劃分為若干個階段。
- 正確地規定狀態變量 s k s_k sk? ,使得它既能描述過程的演變,又具有無后效性。
- 正確地規定決策變量 u k u_k uk? 以及每階段的允許決策集合 D k ( s k ) D_k(s_k) Dk?(sk?) .
- 正確寫出狀態轉移方程 s k + 1 = g k ( s k , u k ) s_{k+1}=g_k(s_k,u_k) sk+1?=gk?(sk?,uk?) 。
- 正確地定義各階段的直接指標函數 d k ( s k , u k ) d_k(s_k,u_k) dk?(sk?,uk?) 和后部子過程的最優指標函數 f k ( s k ) f_k(s_k) fk?(sk?) ,并寫出基本方程(以 max ? \max max 和相加求收益為例): { f k ( s k ) = max ? { d k ( s k , u k ) + f k + 1 ( s k + 1 ) } , k = n , n ? 1 , ? , 1 f n + 1 ( s n + 1 ) = 0 , 邊界條件 \begin{cases} f_k(s_k)=\max\{d_k(s_k,u_k)+f_{k+1}(s_{k+1})\} &,k=n,n-1,\cdots,1 \\ f_{n+1}(s_{n+1})=0&,邊界條件\end{cases} {fk?(sk?)=max{dk?(sk?,uk?)+fk+1?(sk+1?)}fn+1?(sn+1?)=0?,k=n,n?1,?,1,邊界條件?
生產存儲問題
做題時,我們可也按照動態規劃模型五要素進行建模,以生產與儲存問題為例。
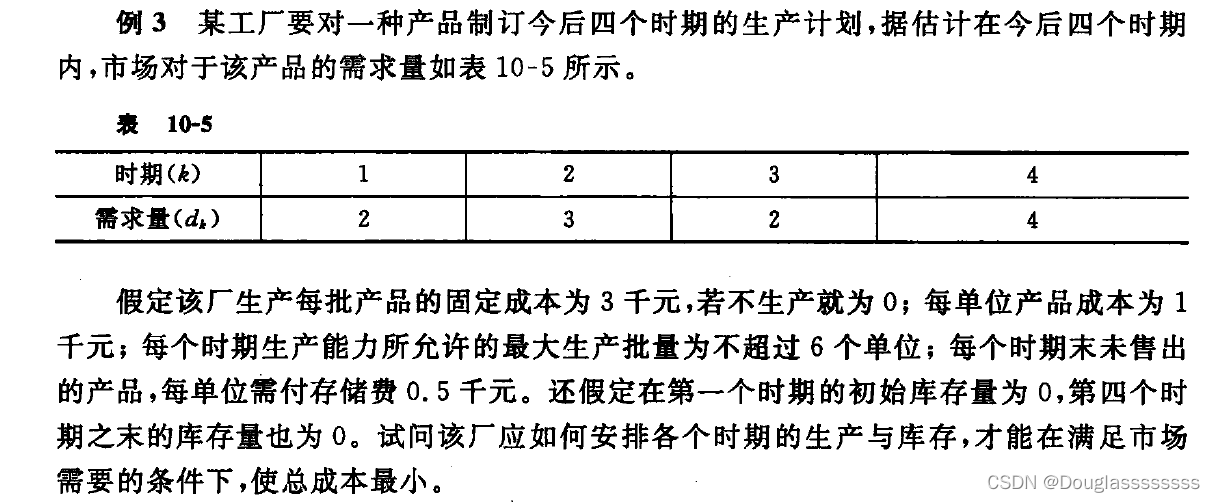
解: 將問題劃分為 4 4 4 個階段( k = 1 , 2 , 3 , 4 k=1,2,3,4 k=1,2,3,4),每個階段表示一個時期;狀態變量 s k s_k sk? 表示第 k k k 階段開始時的庫存量;決策變量 x k x_k xk? 表示第 k k k 階段的產品生產量, d k d_k dk? 表示第 k k k 階段的產品需求量,則狀態轉移方程為: s k + 1 = s k + x k ? d k s_{k+1}=s_k+x_k-d_k sk+1?=sk?+xk??dk? 直接指標函數 g k ( x k ) g_k(x_k) gk?(xk?) 表示第 k k k 階段決策為 x k x_k xk? 時的成本,包括生產成本 c k ( x k ) c_k(x_k) ck?(xk?) 和存儲成本 m k ( x k ) m_k(x_k) mk?(xk?) 。其中, c k ( x k ) = { 0 , x k = 0 3 + x k , x k = 1 , 2 , ? , 6 ∞ , x k > 6 c_k(x_k)=\begin{cases} 0&,x_k=0\\ 3+x_k&,x_k=1,2,\cdots,6\\ \infty&,x_k>6 \end{cases} ck?(xk?)=? ? ??03+xk?∞?,xk?=0,xk?=1,2,?,6,xk?>6? m k ( x k ) = 0.5 ( s k + x k ? d k ) m_k(x_k)=0.5(s_k+x_k-d_k) mk?(xk?)=0.5(sk?+xk??dk?) 。最優指標函數 f k ( s k ) f_k(s_k) fk?(sk?) 表示第 k k k 階段狀態為 s k s_k sk? 采用最優策略時,后部過程的最小成本,則遞推基本方程為: f k ( s k ) = { min ? { c k ( x k ) + m k ( x k ) + f k + 1 ( s k + 1 ) } , k = 4 , 3 , 2 , 1 f 5 ( s 5 ) = 0 f_k(s_k)=\begin{cases} \min\{c_k(x_k)+m_k(x_k)+f_{k+1}(s_{k+1})\},k=4,3,2,1\\ f_5(s_5)=0\end{cases} fk?(sk?)={min{ck?(xk?)+mk?(xk?)+fk+1?(sk+1?)},k=4,3,2,1f5?(s5?)=0? 隨后便是每個階段的求解了,最關鍵的就是確定 s k s_k sk? 和 x k x_k xk? 的取值范圍,需要瞻前顧后,考慮每階段的生產能力以及最后階段的庫存要求。
設備更新問題
對于設備更新問題,教材上用了別的符號,讓人難以和之前的聯系起來,但其實它也可以用我們常見的符號表達的。用一個實際題目來說明。


解: 將問題分為 5 個階段( k = 1 , 2 , 3 , 4 , 5 k=1,2,3,4,5 k=1,2,3,4,5),每個階段代表一年。狀態變量 s k s_k sk? 表示第 k k k 階段初機器的役齡,決策變量 x k x_k xk? 表示第 k k k 階段時保留(K)還是更新(R)。則狀態轉移方程為: s k + 1 = { s k + 1 , x k = K 1 , x k = R s_{k+1}=\begin{cases} s_k+1&,x_k=K\\ 1&,x_k=R \end{cases} sk+1?={sk?+11?,xk?=K,xk?=R? 直接指標函數 g k ( x k ) g_k(x_k) gk?(xk?) 表示第 k k k 階段做出決策 x k x_k xk? 的收入, I k ( s k ) I_k(s_k) Ik?(sk?) 表示第 k k k 階段役齡為 s k s_k sk? 的機器帶來的收入, O k ( s k ) O_k(s_k) Ok?(sk?) 表示第 k k k 階段役齡為 s k s_k sk? 的機器的運行費用, C k ( s k ) C_k(s_k) Ck?(sk?) 表示第 k k k 階段役齡為 s k s_k sk? 的機器更新費用,則有 g k ( x k ) = { I k ( s k ) ? O k ( s k ) , x k = K I k ( 0 ) ? O k ( 0 ) ? C k ( s k ) , x k = R g_k(x_k)=\begin{cases} I_k(s_k)-O_k(s_k)&,x_k=K\\ I_k(0)-O_k(0)-C_k(s_k)&,x_k=R \end{cases} gk?(xk?)={Ik?(sk?)?Ok?(sk?)Ik?(0)?Ok?(0)?Ck?(sk?)?,xk?=K,xk?=R? 最優指標函數 f k ( s k ) f_k(s_k) fk?(sk?) 表示第 k k k 階段役齡為 s k s_k sk? 的機器采用最優策略時,后部過程的最大收入,可寫出遞推基本方程為: f k ( s k ) = { max ? { g k ( x k ) + f k + 1 ( s k + 1 ) } , k = 5 , 4 , 3 , 2 , 1 f 6 ( s 6 ) = 0 f_k(s_k)=\begin{cases} \max\{g_k(x_k)+f_{k+1}(s_{k+1})\},k=5,4,3,2,1\\ f_6(s_6)=0\end{cases} fk?(sk?)={max{gk?(xk?)+fk+1?(sk+1?)},k=5,4,3,2,1f6?(s6?)=0? 剩下就是根據表中的數據代入遞推方程了。
靜態規劃問題
動態規劃方法還可以用來求解一些靜態規劃問題,如整數規劃和非線性規劃問題等。一般將約束條件的右端資源量作為狀態變量,決策變量為原規劃問題的決策變量,直接指標函數為目標函數對應的部分。
有時候最后一個階段的直接指標函數較為復雜,可以換一換次序,簡化計算。
)






)
![P1030 [NOIP2001 普及組] 求先序排列](http://pic.xiahunao.cn/P1030 [NOIP2001 普及組] 求先序排列)
】淺談棧和隊列)



)





