一.獨立按鍵設置
1.
#include "key.h"void init_key(void)
{P1 |= (0x0F << 4);
}int key_pressed(void)
{static int ret = 0;if((P1 & (1 << 4)) == 0){ret = 1;}else if((P1 & (1 << 5)) == 0){ret = 2;}else if((P1 & (1 << 6)) == 0){ret = 3;}else if((P1 & (1 << 7)) == 0){ret = 4;}else{ret = 0;}return ret;
}二.外部中斷
1.終端流程
2.代碼編寫
#include <reg52.h>
#include "delay.h"
#include "digtub.h"void init_enit(void)
{IE |= (1<<7)|(1<<0)|(1<<2);TCON |= (1<<0)|(1<<2);TCON &= ~(1<<0);P3 |= (1<<2)|(1<<3);
}int num = 0;void enit0_hander(void) interrupt 0
{++num;if(num > 9999){num = 0;}
}void enit1_hander(void) interrupt 2
{--num;if(num < 0){num = 9999;}
}int main(void)
{init_enit();while(1){show_number(num); }
}三.定時器
51單片機的定時器(如T0、TI)本質是可編程的16位計數器,核心功能是“計數”或“定時”,原理基于“晶休振蕩器提供的固定時鐘信號”
核心原理拆解:
1.時鐘來源
定時器的計數脈沖來自兩個選擇:
定時模式:脈沖來自單片機內部時鐘 (由外部晶振分頻得到),如晶振11.0592MHz時,內部時鐘頻率為11.0592MHz / 12 = 921.6kHz, 即每個計數脈沖的周期約1.08545(定時的最小單位))
計數模式:脈沖來自外部引腳(TO 對應P3.4、TI對應P3.5),引腳每發生一次電平跳變(下降沿),計數器加|(用于統計外部事件次數,如脈沖數),
2.計數器結構
定時器由兩個8位寄存器(高8位THx、低8位TLx)組成16位計數器(x=0或1,對應TOTI),計數范圍是0000H ~ FFFFH (共65536個計數單位)。
3.工作流程(以定時模式為例)
1.初始化:通過 TMOD寄存器設置定時器模式(如定時模式、16位自動重裝),通過THx和TLX設置初始計數value(如要定時Ims,計算初始值后寫入);
2.啟動:設置TRx=1(TO的TRO、TI 的TRI),定時器開始以固定時鐘脈沖計數,每來一個脈沖,TLx加1,TLx溢出時向THx進位,THx溢出時(計數器從初始值到FFFFH);
3.中斷觸發:計數器溢出后,自動置位“溫出標志位”(TFx=1),若此時中斷允許(ETx=1、EA=1),則觸發定時器中斷,CPU暫停主程序執行中斷服務函數;
4.重裝(可選):若設置為“自動重裝模式”(如TMOD的M1 =1,M0=0),溢出后THx和TLx會自動恢復為初始值,無需在中斷服務函數中手動重置,可實現周期性定時,
示例:11.0592MHz晶振下定時Ims
內部時鐘周期:12 / 11059200Hz 1.085μs;
Ims所需計數次數:1000μs /1.085μS 元921;
16位計數器最大值65536,因此初始值:
65536 - 921 = 64615,轉換為十六進制是FC67H,即THO=OxFC、TLO=0x67.
6、什么是PWM?
(1) PWM(脈沖寬度調制,Pulse Width
Modulation)
PWM是一種通過改變“脈沖信號的高電平時間
占比”來模擬模擬信號的技術,
比如:LED調光(高電平占比高則燈亮,占比
低則燈暗)、電機調速(占比高則轉速快)
-—核心是“用數字脈沖的‘占比’替代連續的模擬電壓”,避免了模擬電路的精度問題,且易于單片機控制,
2.51單片機代碼實現
#include <reg52.h>
#include "key.h"#define Hz200 63035
#define Hz400 64285
#define Hz800 64910
#define Hz2000 65285unsigned int n = Hz200;void init_timer0(void)
{TMOD &= ~(3<<2);TMOD &= ~(3<<0);TMOD |= (1<<0);TH0 = n >> 8;TL0 = n;//TCON |= (1<<4);IE |= (1<<7)|(1<<1);
}/*void timer0_hander(void) interrupt 1
{static int t;++t;if(t >= 500){P2 ^= 0xFF;t = 0;}TH0 = 64535 >> 8;TL0 = 64535;
} */void timer1_hander(void) interrupt 1
{P2 ^= (1<<1);TH0 = n >> 8;TL0 = n;
}int main(void)
{init_timer0();init_key();while(1){int ret;ret = key_pressed();if(ret == 0){TCON &= ~(1<<4); }if(ret == 1){n = Hz200;TCON |= (1<<4);}if(ret == 2){n = Hz400;TCON |= (1<<4);}if(ret == 3){n = Hz800;TCON |= (1<<4);}if(ret == 4){n = Hz2000;TCON |= (1<<4);}}return 0;
}四.重點概念
1.中斷: ??
當中央處理機CPU正在處理某件事的時候外界發生了緊急事件請求,要求CPU暫停當前的工作,轉而去處理這個緊急事件,處理完成以后,再回到原來被中斷的地方,繼續原來的工作,這樣的過程稱為中斷。
中斷源:
? ? ? ? 實現中斷功能的部件稱為中斷系統,請示CPU中斷的請求源稱為中斷源。微型機的中斷系統一般允許多個中斷源,當幾個中斷源同時向CPU請求中斷,要求為它服務的時候,這就存在CPU優先響應哪一個中斷源請求的問題。通常根據中斷源的輕重緩急排隊,優先處理最緊急事件的中斷請求源,即規定每一個中斷源有一個優先級別。CPU總是先響應優先級別最高的中斷請求。
2.
中斷處理流程:
(1).中斷源發出中斷請求:
中斷源通過特定信號,向 CPU 或內核發起 “需要即時處理” 的請求,觸發中斷流程。
(2).內核檢查是否響應相應中斷以及該中斷是否被屏蔽:
內核通過查詢中斷控制器的配置,判斷兩要素:一是該中斷是否在 “可響應中斷列表” 內;二是該中斷是否被 “中斷屏蔽字” 禁用。
(3).內核會檢查中斷的中斷優先級:
內核讀取中斷對應的優先級標識,判斷其優先級是否高于當前正在執行任務的優先級 —— 僅高優先級中斷可 “搶占” 當前任務,低優先級則排隊等待。
(4).保護現場:
內核將當前 CPU 寄存器的數值、當前任務的上下文保存至指定存儲區,確保后續恢復后能回到中斷前的執行狀態。
(5).執行中斷服務函數;
內核跳轉到該中斷對應的 “中斷服務程序” 入口,執行預設的處理邏輯,這是中斷的核心處理環節。
(6).恢復現場;
? ? ? ? 從存儲區中取出步驟 4 保存的寄存器值和任務上下文,恢復 CPU 狀態,讓系統回到中斷發生前的執行點,繼續運行被中斷的任務
3.中斷嵌套:
? ?當CPU正在處理一個中斷源請求的時候(即執行相應的中斷服務程序),發生了另外一個優先級比它還高的中斷源請求。如果CPU能夠暫停對原來中斷源的服務程序,轉而去處理優先級更高的中斷請求源,處理完以后,再回到原低級中斷服務程序,這樣的過程稱為中斷嵌套。
4.中斷向量表:
? ? ?中斷向量表是存儲于內存固定地址的核心數據結構,其本質是建立 “中斷號(唯一中斷標識)” 與 “中斷服務程序(ISR)入口地址” 的一一映射,為 CPU / 內核提供中斷響應時快速定位服務程序的 “索引表”,是中斷機制高效尋址的基礎。
5.51單片機的定時器工作原理:
? ? 51 單片機定時器本質是可編程減計數 / 加計數硬件模塊,核心基于內部晶振分頻后的時鐘脈沖驅動,通過預設計數初值、配置工作模式,實現定時(按時間間隔觸發)或計數(對外部脈沖計數)功能,溢出時可觸發中斷或輸出信號。
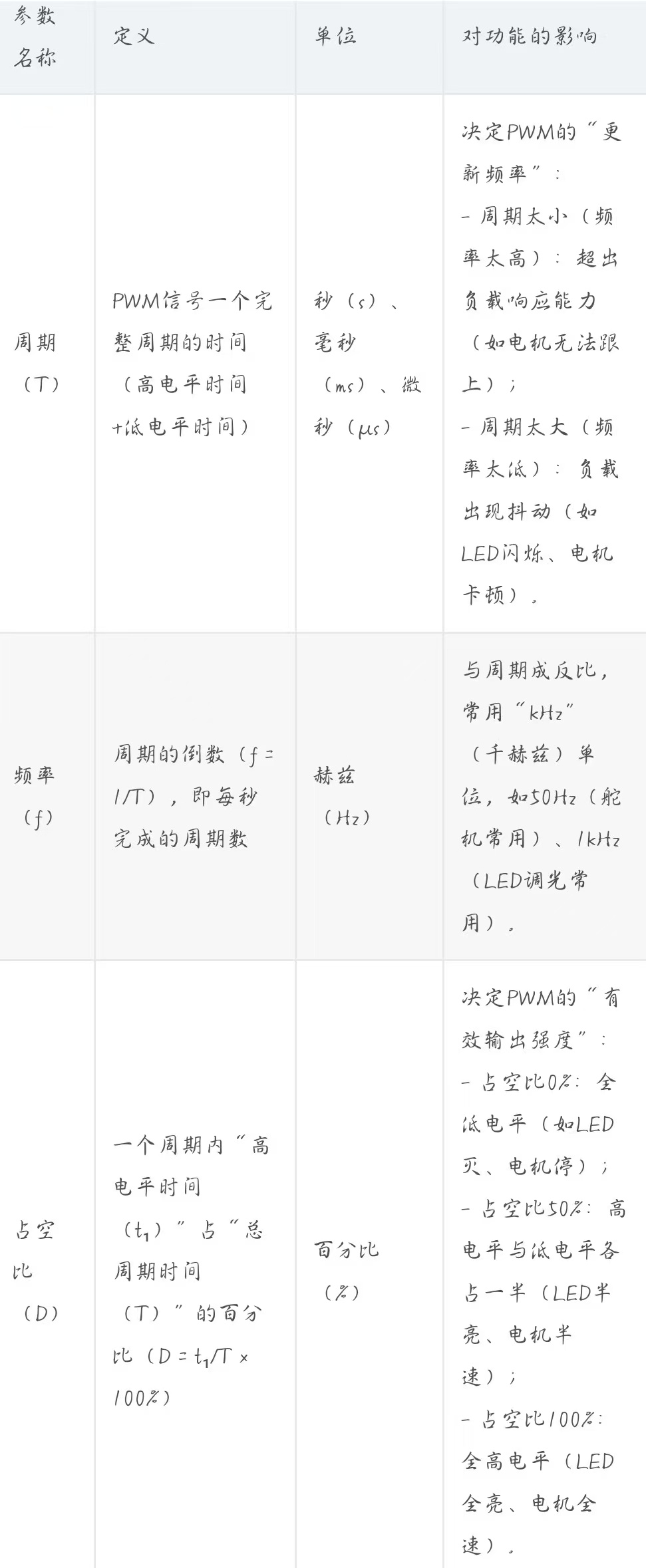
6.PWM:
定義:
PWM(Pulse Width Modulation,脈沖寬度調制)是一種通過周期性輸出高低電平脈沖信號,以調節高電平(有效電平)在一個周期內占比,從而等效控制輸出 “平均電壓 / 功率” 的數字信號調制技術。其核心是利用數字電路的離散電平,模擬出連續的模擬量輸出效果,廣泛應用于電機調速、燈光調光、電源穩壓等場景。
核心參數:
周期、頻率、占空比、分辨率、幅值。






詳解)


)








隨機深度特征選擇方法解釋:簡而言之,RDFS主要針對的是惡意的服務器,它建立在客戶端是誠實的前提下。)
