文章目錄
- 0. 前言
- 1. 鏈表的分類
- 2. 單鏈表的實現
- 2.1 鏈表的基本結構——節點(Node)
- 2.2 核心操作詳解
- 2.2.1 構造和析構
- 2.2.2 插入操作
- 2.2.3 刪除操作
- 2.3.4 其他操作
- 2.4 總結
- 3. 雙向鏈表的實現
- 3.1 基本結構設計
- 3.2 基本操作
- 3.2.1 初始化與銷毀
- 3.2.2 插入與刪除的核心邏輯
- 3.2.3 常用操作
- 3.3 其他輔助函數
- 3.4 總結
- 4. 與順序表對比
- 4.1 時間復雜度對比
- 4.2優缺點總結
0. 前言
上一章的順序表底層是數組,封裝了增刪查改的功能接口成為了順序表。存儲順序表的空間是連續的,順序表非常大時,內存可能無法提供這么大的連續空間,由此,鏈表就被創造了。在一個復雜的系統中,空閑的內存空間散落在內存各處,而鏈表通過指針很好的鏈接起了各個分散的內存空間。
如圖:
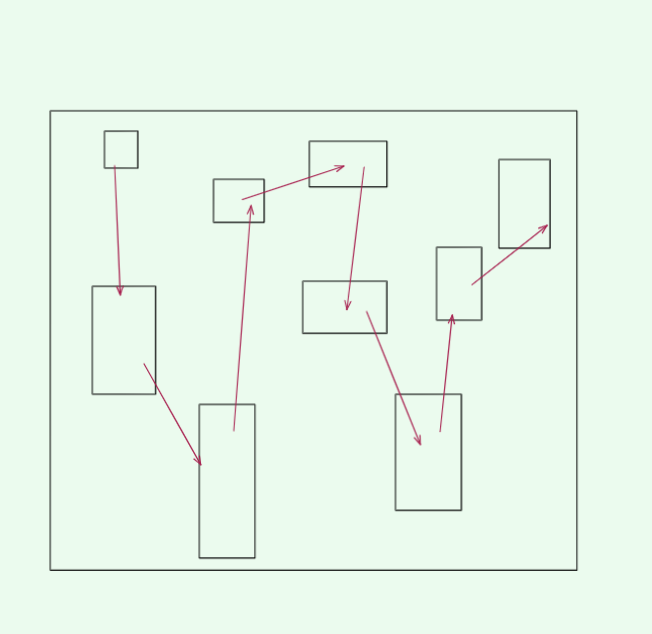
內存空間分配并不連續,但是指針稱為維系各個空間的橋梁
鏈表(linked list) 是一種線性數據結構,每個元素是一個節點對象,各個節點通過指針(或引用)相連接,指針(或引用)記錄了下一個節點的內存地址,通過它可以從當前節點訪問到下一個節點
1. 鏈表的分類
鏈表有多種結構,以下情況組合起來有232^323種:
- 單項或雙向
- 帶頭或不帶頭
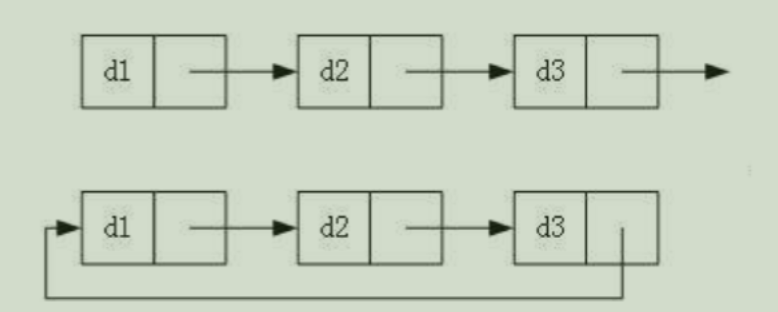
- 循環或不循環
這八種結構種,最常用的是最簡單和最復雜的兩種結構:
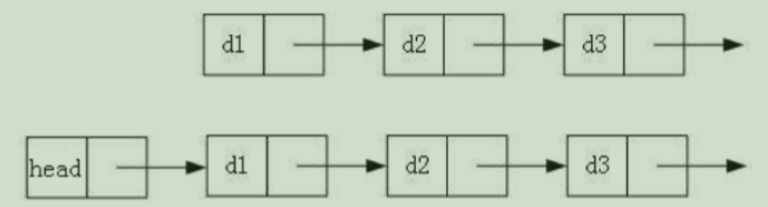
單鏈表(無頭單項不循環鏈表):結構簡單,一般作為其他數據結構的子結構

雙向鏈表(帶頭雙向循環鏈表):結構最復雜,實際使用中基本都是此結構,操作簡單
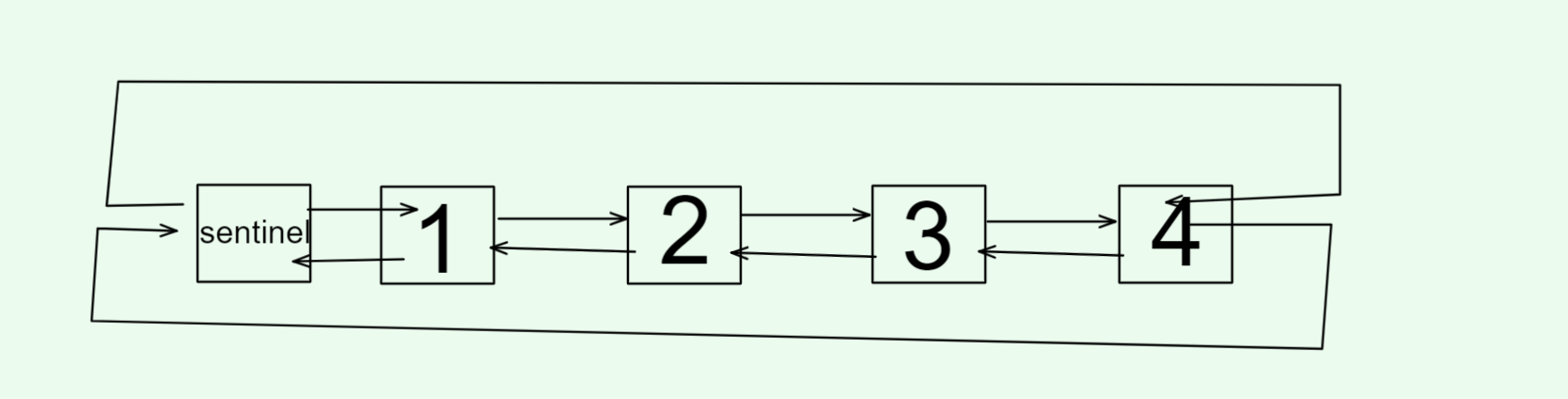
注意:我們把這個帶頭的頭稱為哨兵位,哨兵位不存儲有效數據(有些時候可能存儲鏈表節點個數),位于鏈表第一個有效節點(頭節點) 的前面。
現在我們來實現一下單鏈表和雙向鏈表
2. 單鏈表的實現
2.1 鏈表的基本結構——節點(Node)
鏈表的最小單元是節點,C++用結構體或類定義,鏈表的一個節點包含指針域和數據域,指針域保存該節點指向下一個結點的地址,數據域保存該節點的有效值。還有一個頭指針的概念:頭指針是鏈表的門把手,指向鏈表頭節點的指針變量,是鏈表的入口
// 節點結構體,存儲數據和指向下一個結點的指針
struct Node {T _value; // 數據域Node* _next; // 指針域// 節點構造函數 確保新節點創建時_next處于安全狀態Node(const T& val) : _value(val), _next(nullptr) {}
};
然后我們將節點放入類中,加入單鏈表的基本信息:頭指針、節點個數
template <typename T>
class single_list{
private:// 節點結構體,存儲數據和指向下一個結點的指針struct Node {T _value;Node* _next;// 節點構造函數 確保新節點創建時_next處于安全狀態Node(const T& val) : _value(val), _next(nullptr) {}};Node* _head; // 頭指針,指向鏈表的第一個節點size_t _count; // 節點數量
};
我們引入類模板,能使鏈表的數據類型更多樣化,需要什么樣的類型我們就可以顯式實例化什么類型的鏈表結構
2.2 核心操作詳解
2.2.1 構造和析構
single_list() : _head(nullptr), _count(0) {}
利用初始化列表將鏈表初始化為空鏈表,方便后續操作
~single_list() { clear();}
調用清空函數刪除所有節點,該函數在下文實現
2.2.2 插入操作
- 頭插
// 頭插 O(1)
void push_front(const T& val) {// 創建新節點Node* new_node = new Node(val);new_node->_next = _head;_head = new_node;++_count;
}
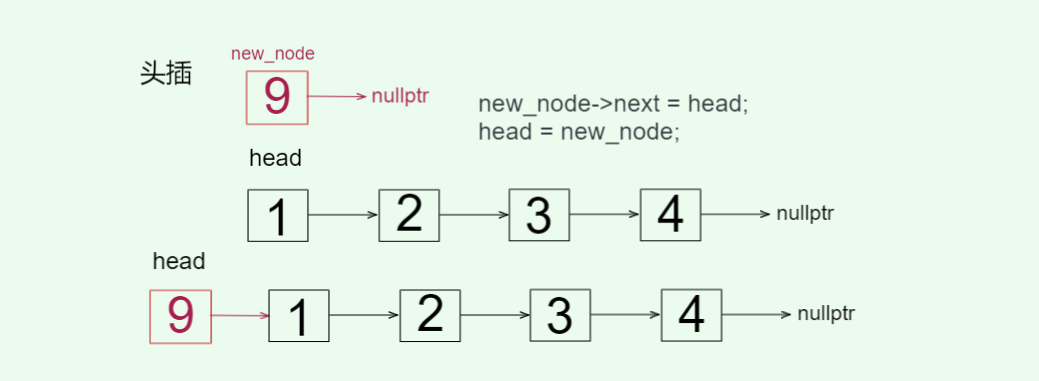
創建新的節點,新節點的指針指向原先的頭節點,然后更新頭指針的指向
- 尾插
// 尾插 O(n)
void push_back(const T& val) {Node* new_node = new Node(val);// 如果是空鏈表 new_node就是新的頭節點if (!_head) {_head = new_node;}else {// 創建臨時變量開始找尾節點Node* cur = _head;while (cur->_next != nullptr) cur = cur->_next;cur->_next = new_node;}++_count;
}
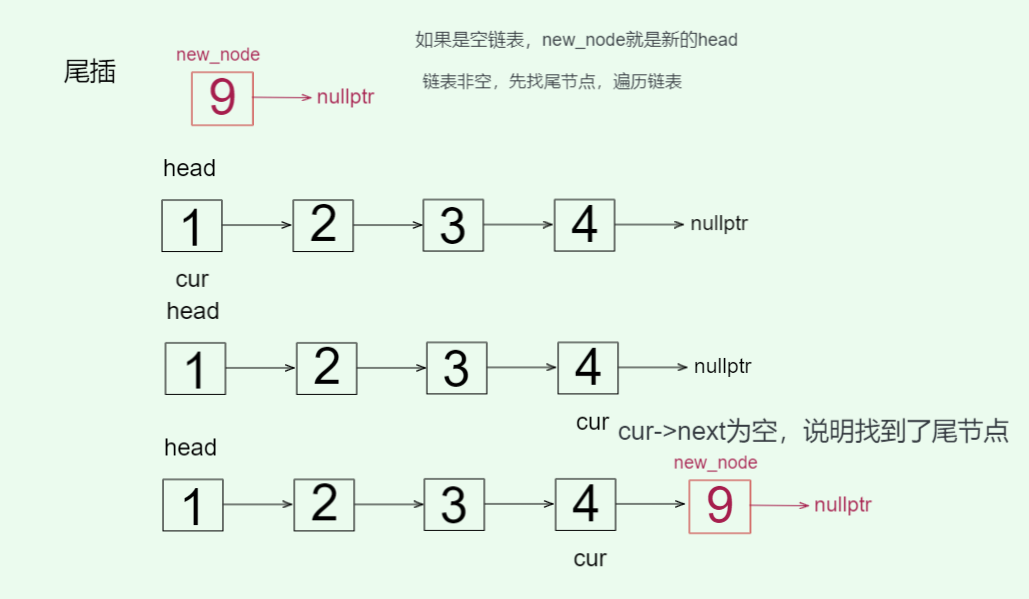
空鏈表要做單獨處理,新節點就是頭節點了;鏈表非空,則要創建臨時變量遍歷整個鏈表找尾,一定不能用頭指針遍歷,使用頭指針遍歷會丟失頭節點的數據
- 指定位置插入節點
// 插入指定位置 O(n)
void insert(int pos, const T& val) {// 確保pos的合法性// pos能取到_count,取到相當于尾插assert(pos >= 0 && pos <= _count);if (pos == 0) return push_front(val);// 創建臨時變量找pos位置的節點Node* cur = _head;// 找到pos的前一個節點 cur最終指向pos-1的位置for (size_t i = 0; i < pos - 1; i++)// 循環pos - 1次{cur = cur->_next;}Node* new_node = new Node(val);new_node->_next = cur->_next;cur->_next = new_node;++_count;
}
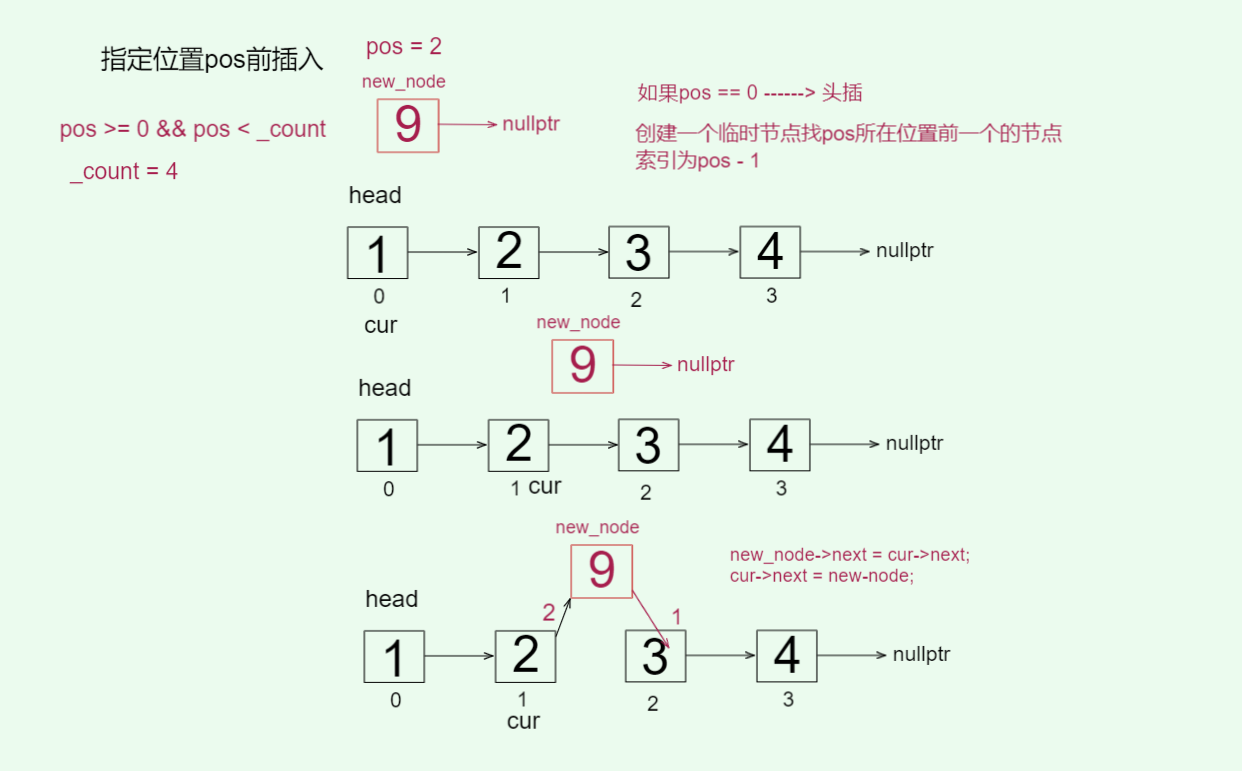
對于用戶輸入的pos要做檢查,pos的值代表索引,從0開始。pos == 0,可以復用頭插法,而pos == _count則代表尾插,在下面的循環邏輯中,是找到pos的前一個節點,所以pos的邊界判斷都可以取到。然后更新指針指向即可
2.2.3 刪除操作
空鏈表不能執行刪除操作
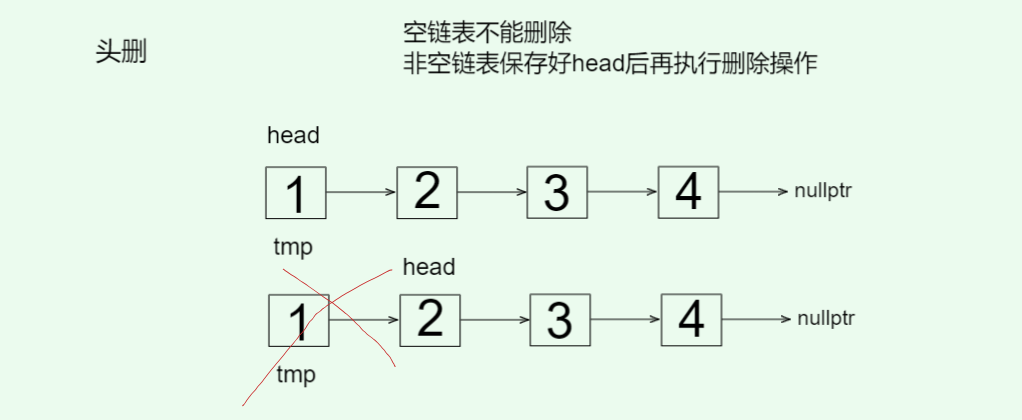
- 頭刪
// 頭刪 O(1)
void pop_front() {// 空鏈表不能刪除assert(_head);// 非空鏈表Node* tmp = _head;_head = tmp->_next;delete tmp;--_count;
}
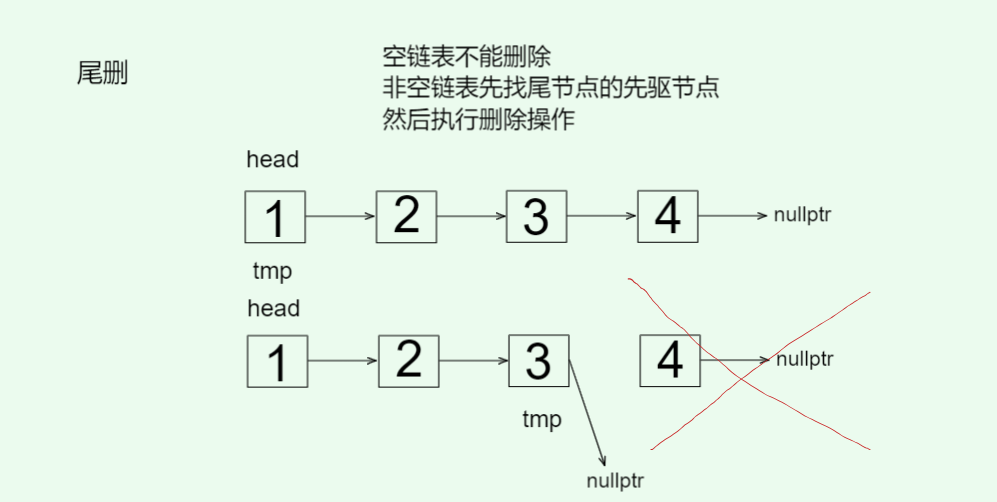
- 尾刪
// 尾刪 0(n)
void pop_back() {// 空鏈表不能刪除assert(_head);// 非空鏈表 先找尾節點的先驅節點// 如果只有一個節點 刪除即可if (_head->_next == nullptr) {delete _head;_head = nullptr;}else {Node* cur = _head;while (cur->_next->_next) cur = cur->_next;delete cur->_next;cur->_next = nullptr;}--_count;
}
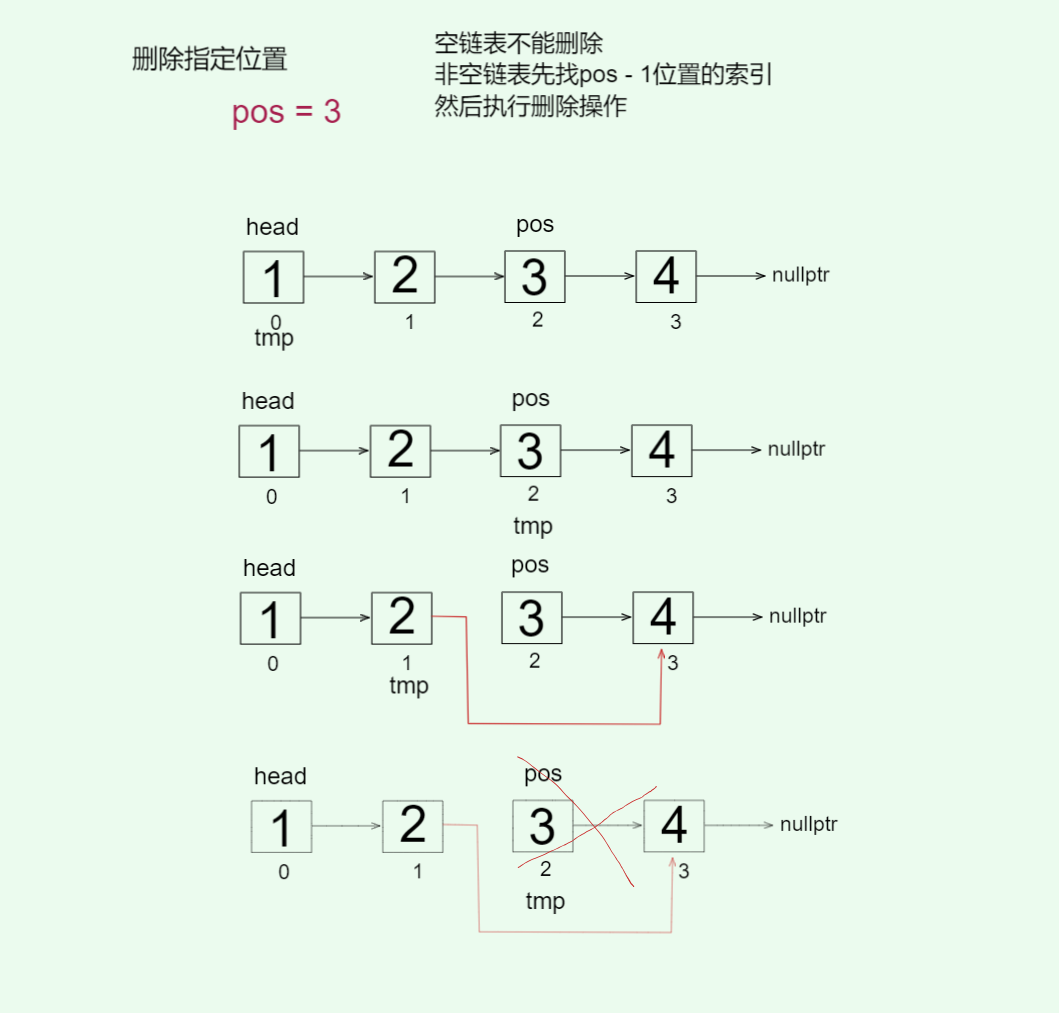
- 刪除指定位置節點
// 刪除指定位置
void erase(int pos) { // 確保pos合法性assert(pos >= 0 && pos < _count); // pos == 0 頭刪if (pos == 0) {pop_front();return;}Node* cur = _head;for (size_t i = 0; i < pos - 1; i++) {cur = cur->_next;}Node* tmp = cur->_next; // 保存要刪除的節點cur->_next = cur->_next->_next;delete tmp; --_count;
}
2.3.4 其他操作
size_t size() {return _count;
}bool empty() {return _count == 0;
}void clear() {while (_head) {Node* tmp = _head;_head = _head->_next;delete tmp;}_count = 0;
}void Print()
{if (!_head) { // 空鏈表處理std::cout << "nullptr" << std::endl;return;}Node* cur = _head;while (cur) { // 遍歷所有節點std::cout << cur->_value; if (cur->_next) {std::cout << "->";}cur = cur->_next;}std::cout << "->nullptr" << std::endl;
}
2.4 總結
| 操作 | 實現邏輯 | 時間復雜度 |
|---|---|---|
| 頭插(push_front) | 新節點指向原頭節點,更新頭指針 | O(1)O(1)O(1) |
| 尾插(push_back) | 遍歷至尾節點,將其指針指向新節點 | O(n)O(n)O(n) |
指定位置pos前插入(insert) | 找到目標位置前一個節點,插入新節點 | O(n)O(n)O(n) |
| 頭刪(pop_front) | 保存原頭節點,頭指針后移,釋放原節點 | O(1)O(1)O(1) |
| 尾刪(pop_back) | 遍歷至尾節點前一個節點,釋放尾節點 | O(n)O(n)O(n) |
| 指定位置刪除(erase) | 找到目標位置前一個節點,釋放目標節點 | O(n)O(n)O(n) |
| 清空(clear) | 從頭部開始,逐個釋放所有節點 | O(n)O(n)O(n) |
- 優點:
- 動態內存分配: 無需預先指定大小,按需分配內存
- 頭部操作高效: 頭刪頭插都是O(1)O(1)O(1)
- 插入刪除靈活: 不用像順序表一樣挪動大量數據,只需要修改指針
- 缺點:
- 不支持隨機訪問: 訪問第n個元素需要從頭遍歷
- 尾部操作效率低: 尾插尾刪需要遍歷到尾部
- 指針管理復雜: 容易出現野指針、空指針問題
- 額外內存開銷: 每個節點需要額外空間存儲指針
- 使用場景
- 需要頻繁進行頭部插入刪除操作
- 數量不確定,需要動態調整大小
- 內存有限,不適合順序表使用的場景
- 不需要隨機訪問元素
3. 雙向鏈表的實現
3.1 基本結構設計
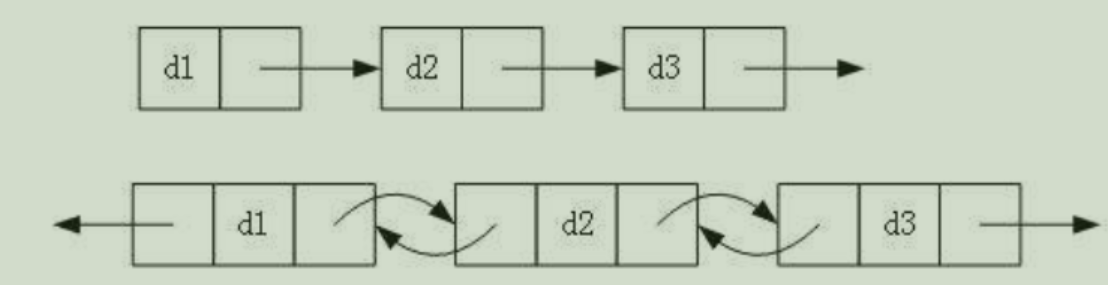
雙向鏈表是帶頭雙向循環鏈表的簡稱,結合了三種思路:
- **雙向:**每個節點有前驅指針
_prev和后繼指針_next,方便前后遍歷 - **循環:**鏈表尾節點
_next指回哨兵位,哨兵位的_prev指向尾節點,整個鏈表形成一個環 - **帶頭(帶哨兵位):**用一個特殊節點
_sentinel作為表頭,不存儲有效數據,只起到占位、邊界作用
這樣做的優點是:
- 統一了插入和刪除的邏輯,不用判別頭和尾
- 空鏈表和非空鏈表的處理方式一致,封裝性更好
- 代碼更簡潔,出錯率低
我們先設計一個內部節點結構Node:
template <typename T>
struct Node {T _value;Node* _prev;Node* _next;Node(const T& val) : _value(val),_prev(nullptr),_next(nullptr){}
};
再設計鏈表類:double_list:
_sentinel:哨兵節點,始終存在。_count:鏈表中有效節點的個數。
class double_list {
private:struct Node {T _value;Node* _prev;Node* _next;Node(const T& val) : _value(val),_prev(nullptr),_next(nullptr){}};Node* _sentinel; // 哨兵位size_t _count;
};
3.2 基本操作
3.2.1 初始化與銷毀
double_list() : _count(0) {// 初始化哨兵位 _prev _next都指向自己_sentinel = new Node(T()); //不存儲有效數據_sentinel->_next = _sentinel;_sentinel->_prev = _sentinel;
}~double_list() { clear(); delete _sentinel; }
3.2.2 插入與刪除的核心邏輯
1. 在指定位置前插入
// 在pos節點前插入new_node
void insert_node(Node* pos, Node* new_node) {// 先確定好new_node的位置new_node->_prev = pos->_prev;new_node->_next = pos;// 這里順序不能反了pos->_prev->_next = new_node;pos->_prev = new_node;++_count;
}
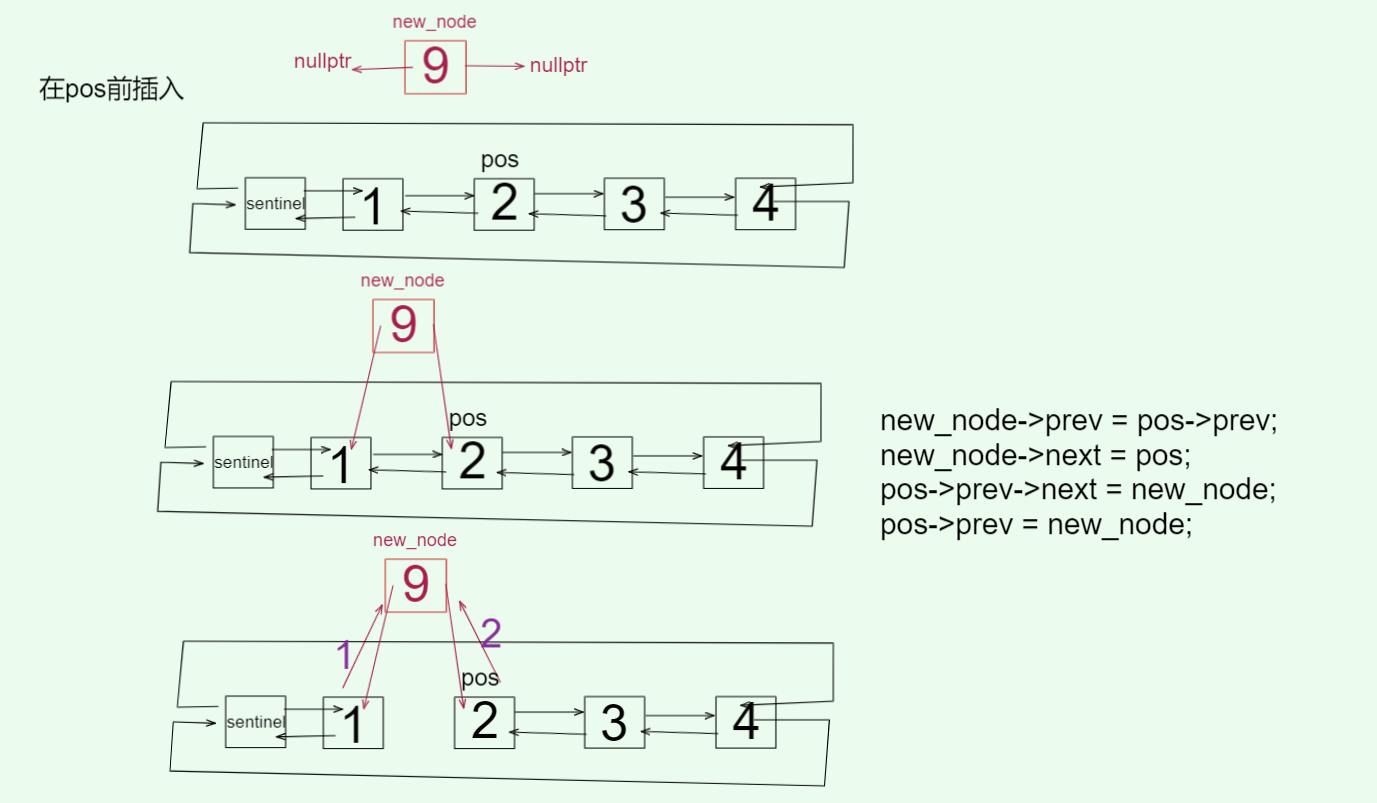
處理指針指向順序不能顛倒,要先考慮原有節點存在,這里詳細講一下,后續不再贅述。
對任意相鄰三點 A <-> B <-> C:
A->_next == BB->_prev == AB->_next == CC->_prev == B
做插入/刪除時,不要提前破壞老的不變量,要么先把新節點“準備好”,要么先把“鄰居接好”,保證任何時刻都能從 S 沿 _next 或 _prev 找回環,不會丟失鏈。所以,在 pos 前插入 new_node 的正確順序為:設:B = pos A = B->_prev
安全順序(推薦):
-
先給新節點“自報家門”(只寫新節點,不動舊鏈)
new_node->_prev = A; new_node->_next = B; -
再接左邊的
_nextA->_next = new_node; -
最后接右邊的
_prevB->_prev = new_node;
這套順序的邏輯是:
- 第1步只動
new_node,不破壞原有結構; - 第2步把
A指向新節點,此時從左側走到new_node沒問題; - 第3步把
B的前驅改為新節點,完成閉合; - 全程不會出現“鏈斷掉一截找不回來的窗口期”。
為什么不能顛倒?一個典型反例:
// ? 先改 B->_prev,再去用 pos->_prev
B->_prev = new_node;
B->_prev->_next = new_node; // 此時 B->_prev 已是 new_node,這行等價 new_node->_next = new_node,鏈炸
如果沒有緩存 A(而是反復寫 pos->_prev),一旦你先把 B->_prev 改成了 new_node,再通過 pos->_prev 想找到老的 A 就晚了——你拿到的是 new_node,從而把 new_node->_next 錯誤地指向 new_node 自己,造成環路破壞。
結論:如果你不緩存
A,就必須按先寫 new_node 的 _prev/_next,再寫 A->_next,最后寫 B->_prev的順序。
如果你緩存了:Node* A = B->_prev;,則可以適當調換 2、3 兩步的先后(先改B->_prev或先改A->_next都行),因為A已經固定,不會丟。
2. 刪除指定節點
// 刪除指定節點
void erase_node(Node* pos) {pos->_prev->_next = pos->_next;pos->_next->_prev = pos->_prev;delete pos;--_count;
}
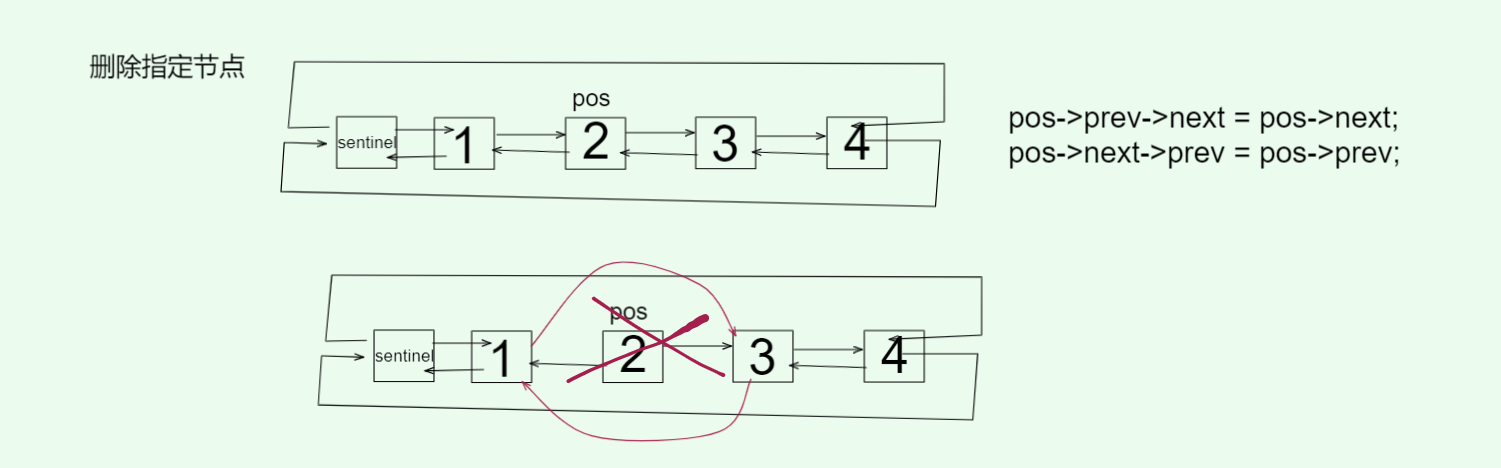
還是用這條鏈路舉例子:A <-> B <-> C
設:B = pos A = B->_prev C = B->_next
安全順序(必須這樣):
-
先把鄰居接好,繞過
BA->_next = C; C->_prev = A; -
再釋放
Bdelete B;
為什么?
- 如果你先
delete B,隨后再去訪問B->_prev或B->_next來接回鄰居,就會解引用野指針,是未定義行為。 - 先把
A和C直接連起來,保證環不斷;最后才安全釋放B。
常見錯誤:
delete B; // ? 提前釋放
A->_next = B->_next; // 立刻野指針解引用
有了這兩個基礎操作,頭插、尾插、頭刪、尾刪都能用它們實現。所以這兩個操作可以封裝到private中,僅供類自己使用。
3.2.3 常用操作
1. 頭插&尾插
// 頭插 在哨兵位后插入
void push_front(const T& val) {insert_node(_sentinel->_next, new Node(val));
}// 尾插 在哨兵位前插入
void push_back(const T& val) {insert_node(_sentinel, new Node(val));
}
2. 頭刪&尾刪
// 頭刪 哨兵位的next
void pop_front() {if(empty()) throw std::out_of_range("List empty");erase_node(_sentinel->_next);
}// 尾刪 哨兵位的prev
void pop_back() {if (empty()) throw std::out_of_range("List empty");erase_node(_sentinel->_prev);
}
3. 訪問指定位置
// 訪問指定位置節點 用索引
T& at(int pos) {if(pos < 0 || pos >= _count) throw std::out_of_range("Index out of range");//創建臨時節點訪問鏈表// 哨兵位的next索引是0Node* cur = _sentinel->_next;for (size_t i = 0; i < pos; i++){cur = cur->_next;}return cur->_value;}4. 指定位置插入&刪除
// 在pos位置節點前插入新節點
void insert(int pos, const T& val) {if(pos < 0 || pos > _count) throw std::out_of_range("Insert position out of range");// 要在pos前插入 就從哨兵位走Node* cur = _sentinel;for (size_t i = 0; i < pos; i++){cur = cur->_next;}insert_node(cur, new Node(val));}// 刪除pos位置的節點
void erase(int pos) {if(pos < 0 || pos >= _count) throw std::out_of_range("Erase position out of range");// 找pos位置 從索引為零的位置開始Node* cur = _sentinel->_next;for (size_t i = 0; i < pos; i++){cur = cur->_next;}erase_node(cur);
}
3.3 其他輔助函數
打印鏈表
void Print() {std::cout << "_sentinel->";Node* cur = _sentinel->_next;while (cur != _sentinel) {std::cout << cur->_value << "->";cur = cur->_next;}std::cout << "_sentinel" << std::endl;
}
清空鏈表
// 清空鏈表 保留哨兵位
void clear() {Node* cur = _sentinel->_next;while (cur != _sentinel) {Node* tmp = cur;cur = cur->_next;delete tmp;}_sentinel->_next = _sentinel;_sentinel->_prev = _sentinel;_count = 0;
}
判斷鏈表是否為空
bool empty() const { return _count == 0; }
返回鏈表長度
size_t size() const { return _count; }
3.4 總結
| 操作 | 說明 | 時間復雜度 |
|---|---|---|
| push_front(val) | 頭插,在哨兵后插入新節點 | O(1)O(1)O(1) |
| push_back(val) | 尾插,在哨兵前插入新節點 | O(1)O(1)O(1) |
| insert(pos, val) | 在第 pos 個位置前插入新節點(需遍歷到 pos) | O(n)O(n)O(n) |
| insert_node | 已知節點 pos 前插入 new_node,只改指針 | O(1)O(1)O(1) |
| pop_front() | 頭刪,刪除第一個節點 | O(1)O(1)O(1) |
| pop_back() | 尾刪,刪除最后一個節點 | O(1)O(1)O(1) |
| erase(pos) | 刪除第 pos 個節點(需遍歷到 pos) | O(n)O(n)O(n) |
| erase_node | 刪除已知節點指針 | O(1)O(1)O(1) |
| at(pos) | 按索引訪問第 pos 個節點 | O(n)O(n)O(n) |
- 優點
- 帶哨兵節點:
_sentinel作為頭尾的“標志”,統一了邊界條件,避免空鏈表、頭刪、尾刪的特殊情況。 - 循環結構: 遍歷時不用判斷
nullptr,走到_sentinel就說明一圈結束。 - 雙向鏈表: 已知某個節點指針時,刪除/插入只需改前后兩個指針,操作 O(1)O(1)O(1)。
- 動態存儲: 不需要連續內存,比數組更靈活。
- 缺點
- 訪問效率低:
at、insert、erase都需要順序遍歷, O(n)O(n)O(n)。 - 額外空間開銷大 每個節點需要兩個指針
_prev和_next,比單鏈表開銷更高。 - 實現復雜: 插入/刪除時要維護兩個方向的指針,順序稍有不慎就會出現 bug(比如斷鏈、死循環)。
4. 與順序表對比
4.1 時間復雜度對比
| 操作 | 數組 (順序表) | 單向鏈表 | 雙向循環鏈表(帶頭) |
|---|---|---|---|
| 按下標訪問 | O(1)O(1)O(1) | O(n)O(n)O(n) | O(n)O(n)O(n) |
| 按值查找 | O(n)O(n)O(n) | O(n)O(n)O(n) | O(n)O(n)O(n) |
| 頭插 | O(n)O(n)O(n)(需要整體移動) | O(1)O(1)O(1) | O(1)O(1)O(1) |
| 尾插問 | O(1)O(1)O(1)(有容量時) | O(1)O(1)O(1) | O(1)O(1)O(1) |
| 中間插入 | O(n)O(n)O(n)(移動元素) | O(n)O(n)O(n)(遍歷到位置) | O(n)O(n)O(n)(遍歷到位置) |
| 頭刪 | O(n)O(n)O(n)(整體移動) | O(1)O(1)O(1) | O(1)O(1)O(1) |
| 尾刪問 | O(1)O(1)O(1) | O(n)O(n)O(n)(需找前驅) | O(1)O(1)O(1) |
| 刪除已知節點指針 | O(1)(僅數組下標已知時) | O(n)O(n)O(n)(需找前驅) | O(1)O(1)O(1) |
| 空間使用 | 連續空間,高效 | 每節點額外 1 個指針 | 每節點額外 2 個指針 |
| 遍歷 | O(n)O(n)O(n) | O(n)O(n)O(n) | O(n)O(n)O(n) |
4.2優缺點總結
順序表
- 優點:支持隨機訪問 O(1)O(1)O(1),內存利用率高,局部性好。
- 缺點:插入/刪除開銷大(需要整體移動),容量固定或擴容開銷高。
- 適用場景:頻繁訪問、較少插入刪除。
單鏈表
- 優點:插入/刪除高效,內存分配靈活。
- 缺點:不能快速找到前驅,刪除已知節點需 O(n)O(n)O(n),訪問慢。
- 適用場景:需要頻繁插入/刪除,但多在鏈表頭部操作。
雙向鏈表(帶頭循環)
- 優點:
- 插入/刪除效率高,尤其是頭尾操作 O(1)O(1)O(1)。
- 已知節點指針時,刪除/插入 O(1)O(1)O(1)。
- 帶頭哨兵,邏輯統一,不需要處理特殊情況。
- 缺點:
- 空間開銷更大,每節點要兩個指針。
- 隨機訪問仍是 O(n)O(n)O(n)。
- 實現復雜,指針操作容易出錯。
- 適用場景:需要頻繁在任意位置插入/刪除的場景










之 量化對比余弦——仙盟創夢IDE)



)
及其實例化程序,模擬了時間的設置、顯示和自動流逝功能,類似一個簡易電子時鐘。)



