前言
在時間序列預測領域,集成學習方法一直占據重要地位。此前我們介紹了基于傳統集成思想的時序預測方法(查看前文),而梯度提升樹(GBDT)作為集成學習的佼佼者,在時序預測中表現尤為突出。本文將重點講解 LightGBM 算法的原理、優勢及其在時序預測中的應用,并介紹如何使用粒子群優化(PSO)算法尋找最優參數,提升預測精度。
1: LightGBM 算法原理簡介與應用
1.1 LightGBM 基本原理
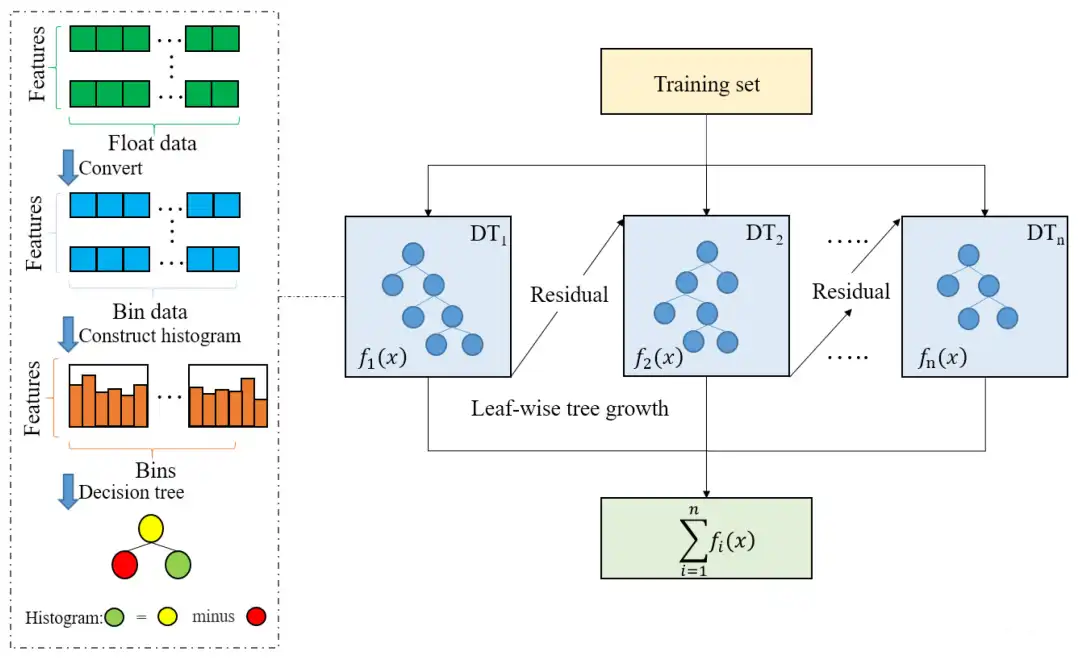
LightGBM(Light Gradient Boosting Machine)是微軟于 2017 年開源的梯度提升框架,基于決策樹的集成學習算法,核心思想是通過不斷迭代訓練弱分類器(決策樹)?來修正上一輪的預測誤差,最終形成強分類器。
與傳統 GBDT 相比,LightGBM 創新性地提出了兩種關鍵技術:
- histogram-based 決策樹學習?:將連續特征值離散化為直方圖(bin),減少分裂時的計算量(時間復雜度從 O (n) 降至 O (bin))
- ?帶深度限制的 Leaf-wise 生長策略 :不同于 XGBoost 的 Level-wise(按層生長),LightGBM 優先分裂增益最大的葉子節點,在保持精度的同時減少樹的深度
1.2 LightGBM 算法流程
LightGBM 的迭代流程可概括為以下步驟:
1. 初始化模型?:以訓練數據的均值作為初始預測值
2.?計算負梯度?:將損失函數對當前模型的預測值求導,得到殘差(作為新的訓練目標)
3.?訓練弱分類器?:使用 histogram 方法構建決策樹擬合殘差
4.?更新模型?:通過學習率(learning_rate)控制新樹的權重,累加至集成模型
5.?重復步驟 2-4 :直至達到最大迭代次數或滿足停止條件
圖1:LightGBM算法圖形解釋
1.3 LightGBM 與 XGBoost的對比
| 特性 | LightGBM | XGBoost |
|---|---|---|
| 樹生長策略 | Leaf-wise(按葉子優先) | Level-wise(按層生長) |
| 特征處理 | 直方圖離散化(速度快) | 精確分裂(精度高但慢) |
| 內存占用 | 低(直方圖壓縮) | 高(需存儲所有特征值) |
| 并行方式 | 特征并行 + 數據并行 | 特征并行 |
| 對缺失值處理 | 自動處理(默認分到增益大的分支) | 需要手動指定缺失值方向 |
| 類別特征支持 | 原生支持(無需 One-hot 編碼) | 需要手動編碼 |
| 時間復雜度 | ||
| 適用場景 | 大數據集、追求訓練速度 | 小數據集、追求高精度 |
數據來源:LightGBM 官方文檔
1.4 LightGBM 在時序預測中的優勢
時間序列數據具有時序依賴性和周期性特點,LightGBM 的以下特性使其在時序預測中表現優異:
-?高效處理大規模數據?:直方圖算法降低了時間復雜度,適合處理長時序數據
-?自動特征交互?:決策樹能自動捕捉特征間的非線性關系(如季節性與趨勢的交互)
-?正則化機制?:通過reg_alpha、reg_lambda等參數有效抑制過擬合,避免對時序噪聲的過度擬合
-?靈活的參數調優 :可通過num_leaves、max_depth等參數平衡模型復雜度與泛化能力.
2:粒子群優化(PSO)算法
2.1 PSO 基本原理
粒子群優化算法(Particle Swarm Optimization)源于對鳥群覓食行為的模擬,通過群體中個體間的協作與信息共享尋找最優解。在參數優化場景中,每個 "粒子" 代表一組參數組合,通過迭代更新位置尋找最優解。
核心思想:
- 每個粒子通過個體經驗(自身歷史最優)和群體經驗(全局最優)調整搜索方向
- 保持一定的隨機性以避免陷入局部最優
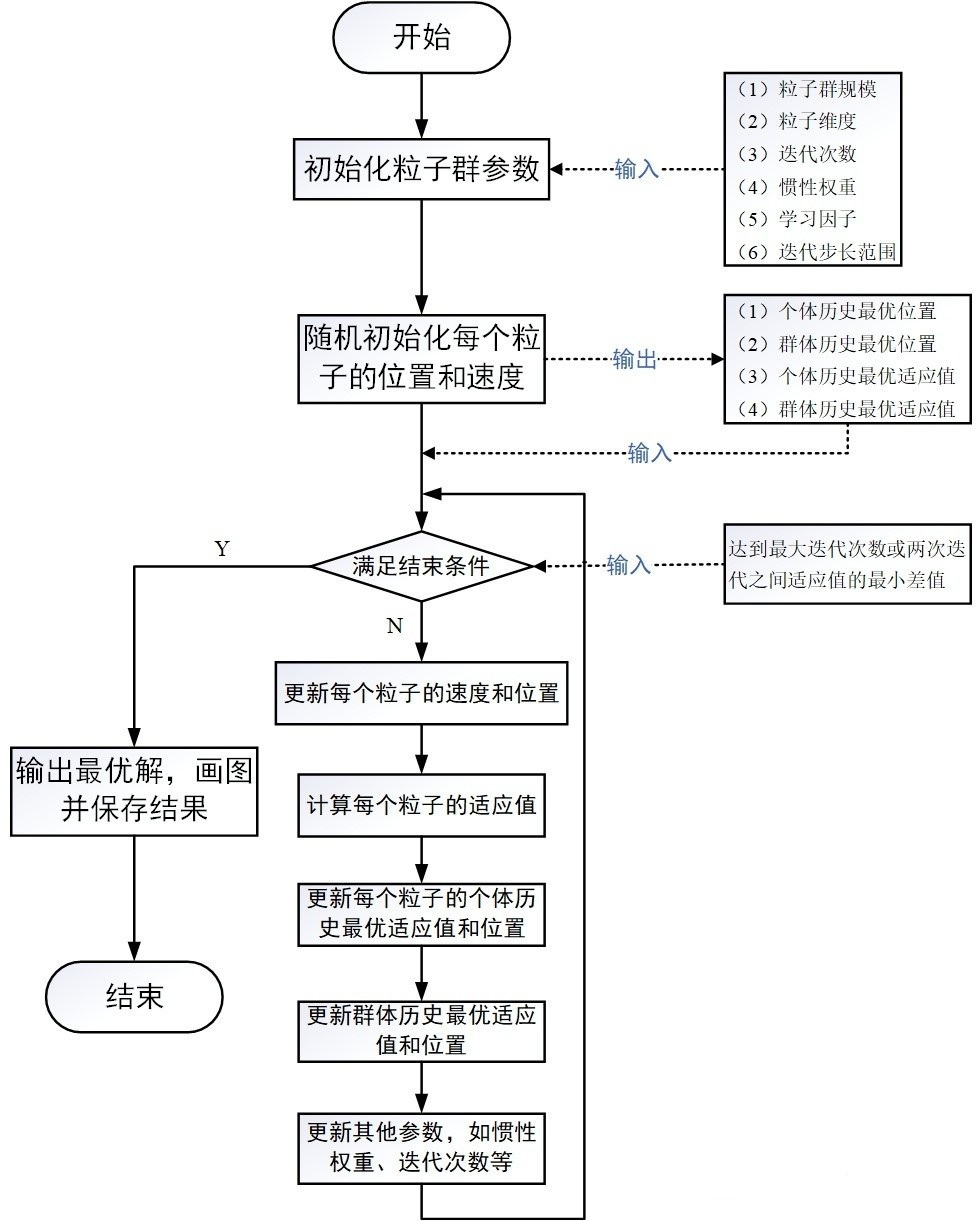
2.2 PSO 算法流程
1.?初始化粒子群?:隨機生成一定數量的粒子(參數組合),設置初始位置和速度
2.?計算適應度?:對每個粒子的參數組合進行評估(如 LightGBM 的預測誤差)
3.?更新最優解?:記錄每個粒子的個體最優位置和整個群體的全局最優位置
4.?更新速度和位置?:根據個體最優和全局最優調整粒子的運動狀態
5.?重復步驟 2-4 :直至達到最大迭代次數或滿足早停條件
2.3 速度與位置更新公式
PSO 的核心是通過以下公式更新粒子的速度和位置:
速度更新公式:
位置更新公式:
其中參數含義:
:粒子i在t時刻的速度
:粒子i在t時刻的位置(參數組合)
:慣性權重(控制歷史速度的影響,通常取 0.7212)
:學習因子(分別控制個體經驗和群體經驗的權重,通常均取 1.1931)
:[0,1] 區間的隨機數(增加搜索隨機性)
:粒子i的個體最優位置
:群體的全局最優位置
圖2: PSO流程圖
2.4 PSO 優化 LightGBM 參數的優勢
相較于網格搜索、隨機搜索等傳統方法,PSO 在參數優化中具有明顯優勢:
- 搜索效率高?:無需遍歷所有參數組合,通過群體智能快速收斂到最優解 -?全局搜索能力強?:結合個體與群體經驗,減少陷入局部最優的風險
-?適合高維空間?:對于 LightGBM 的多參數優化場景表現更優
-?易于實現 :算法邏輯簡單,可靈活調整粒子數量和迭代次數平衡效率與精度
3:PSO 優化 LightGBM 實戰演示
在了解了 LightGBM 原理和 PSO 算法基礎后,本節將通過完整代碼演示如何將兩者結合,實現時間序列的高精度預測。我們以負荷預測為例,展示從參數優化到模型評估的全流程。
3.1?參數空間定義、粒子類定義和 PSO 優化函數
3.1.1 參數空間定義
LightGBM 的性能高度依賴參數配置,我們需要根據業務場景和數據特點定義合理的參數搜索范圍。結合負荷預測的時序特性,重點優化以下參數:
# -------------------------- 參數空間定義 --------------------------
# 定義LightGBM可優化參數的搜索范圍(參考官方文檔)
PARAM_RANGES = {'learning_rate': (0.01, 0.1), # 學習率:控制模型更新步長,過小收斂慢,過大易過擬合'num_leaves': (31, 251), # 葉子節點數量:影響模型復雜度,負荷預測中建議31-251'feature_fraction': (0.5, 1.0), # 特征采樣比例:增強泛化能力,避免對噪聲特征過度依賴'bagging_fraction': (0.5, 1.0), # 樣本采樣比例:減少過擬合風險,尤其適合時序數據中的異常值'bagging_freq': (1, 10), # 采樣頻率:與bagging_fraction配合,控制采樣間隔'min_child_samples': (5, 100), # 葉子節點最小樣本數:控制過擬合,值越大模型越簡單'reg_alpha': (0.0, 10.0), # L1正則化系數:抑制高維特征權重,適合多特征的負荷預測'reg_lambda': (0.0, 10.0), # L2正則化系數:平滑權重分布,增強模型穩定性'max_depth': (1, 15) # 最大深度:與num_leaves關聯,控制樹結構復雜度
}# 參數類型定義(連續型/整數型)
PARAM_TYPES = {'learning_rate': 'continuous','num_leaves': 'integer','feature_fraction': 'continuous','bagging_fraction': 'continuous','bagging_freq': 'integer','min_child_samples': 'integer','reg_alpha': 'continuous','reg_lambda': 'continuous','max_depth': 'integer'
}# 參數名稱列表
PARAM_NAMES = list(PARAM_RANGES.keys())參數設置說明:
- 負荷預測中,
num_leaves不宜過大(避免過擬合短期波動),max_depth建議控制在 15 以內(防止捕捉冗余時序特征)。 - 正則化參數
reg_alpha和reg_lambda對含天氣、節假日等多特征的負荷數據尤為重要,可有效平衡特征影響。
3.1.2 粒子類定義
在 PSO 算法中,每個粒子代表一組 LightGBM 參數組合,包含位置(參數值)、速度(參數調整幅度)和個體最優記錄:
class Particle:"""粒子類,用于PSO算法中表示一個參數組合及其相關屬性"""def __init__(self):"""初始化粒子的位置、速度和最優狀態"""# 初始化位置(隨機在參數范圍內取值)self.position = {}for param in PARAM_NAMES:min_val, max_val = PARAM_RANGES[param]if PARAM_TYPES[param] == 'continuous':self.position[param] = np.random.uniform(min_val, max_val) # 連續參數隨機采樣else: # 整數型參數self.position[param] = np.random.randint(min_val, max_val + 1) # 整數參數離散采樣# 初始化速度(根據參數范圍動態設置,確保調整幅度合理)self.velocity = {}for param in PARAM_NAMES:min_val, max_val = PARAM_RANGES[param]range_val = max_val - min_valself.velocity[param] = np.random.uniform(-range_val / 10, range_val / 10) # 速度范圍為參數范圍的1/10# 初始化個體最優(位置和適應度)self.best_position = self.position.copy() # 記錄當前粒子的最優參數組合self.best_fitness = float('inf') # 適應度為RMSE,初始化為無窮大粒子設計思路:
- 位置初始化確保參數在合理范圍內,避免無效值(如負的學習率)。
- 速度與參數范圍掛鉤(如
learning_rate范圍 0.09,速度范圍 ±0.009),保證調整幅度適中。
3.1.3 PSO 優化函數
核心函數實現參數尋優邏輯,通過迭代更新粒子位置,找到使 LightGBM 預測誤差最小的參數組合:
def pso_optimize_lgb(x_train, y_train, max_iter=50, n_particles=20,w=0.7212, c1=1.1931, c2=1.1931):"""使用粒子群優化(PSO)算法尋找LightGBM的最優參數組合參數:x_train: 訓練特征數據(含時序特征、外部特征等)y_train: 訓練標簽數據(負荷值)max_iter: 最大迭代次數(默認50)n_particles: 粒子數(默認20,根據特征維度調整)w: 慣性權重(SPSO 2011建議值0.7212,控制歷史速度影響)c1: 個體學習因子(1.1931,控制個體經驗權重)c2: 社會學習因子(1.1931,控制群體經驗權重)返回:best_params: 最優參數組合(字典)best_score: 最優RMSE分數"""# 初始化粒子群particles = [Particle() for _ in range(n_particles)]# 初始化全局最優global_best_position = Noneglobal_best_fitness = float('inf')# 早停參數:避免無效迭代,提升優化效率flag = 0 # 標記本輪是否更新全局最優(1=更新,0=未更新)k = 0 # 連續未更新全局最優的次數,超過5次則早停# PSO主循環for iter_num in range(max_iter):# 計算每個粒子的適應度(模型性能)并更新最優for particle in particles:# 構建模型參數(固定參數+粒子位置參數)fixed_params = {'boosting_type': 'gbdt', # 梯度提升類型'objective': 'mse', # 損失函數(均方誤差,適合回歸)'metric': 'rmse', # 評估指標(均方根誤差)'verbose': -1, # 靜默模式,不輸出訓練日志'seed': 64, # 隨機種子,保證結果可復現'n_jobs': -1 # 并行計算,使用所有CPU核心}model_params = {**fixed_params,** particle.position} # 合并參數# 訓練模型并計算適應度(訓練集RMSE)model = lgb.LGBMRegressor(**model_params)model.fit(x_train, y_train) # 擬合訓練數據y_pred = model.predict(x_train) # 預測訓練集current_fitness = np.sqrt(mean_squared_error(y_train, y_pred)) # 計算RMSE# 更新個體最優(當前粒子的歷史最佳)if current_fitness < particle.best_fitness:particle.best_fitness = current_fitnessparticle.best_position = particle.position.copy()# 更新全局最優(所有粒子的歷史最佳)if current_fitness < global_best_fitness:global_best_fitness = current_fitnessglobal_best_position = particle.position.copy()flag = 1 # 標記本輪更新了全局最優# 早停邏輯:連續5輪未提升則停止if flag:k = 0 # 重置計數器flag = 0 # 重置標記else:k += 1 # 累加未更新次數if k >= 5: # 觸發早停print(f'連續 {k} 輪沒有下降, 退出迭代.')return global_best_position, global_best_fitness# 更新粒子速度和位置(核心迭代邏輯)for particle in particles:for param in PARAM_NAMES:# 生成隨機因子(增加搜索多樣性)r1 = np.random.uniform(0, c1) # 個體學習隨機因子r2 = np.random.uniform(0, c2) # 社會學習隨機因子# 計算速度更新分量cognitive_component = c1 * r1 * (particle.best_position[param] - particle.position[param]) # 個體經驗social_component = c2 * r2 * (global_best_position[param] - particle.position[param]) # 群體經驗new_velocity = w * particle.velocity[param] + cognitive_component + social_component # 新速度# 限制速度范圍(避免參數調整幅度過大)min_val, max_val = PARAM_RANGES[param]range_val = max_val - min_valnew_velocity = np.clip(new_velocity, -range_val / 5, range_val / 5) # 速度不超過參數范圍的1/5particle.velocity[param] = new_velocity# 計算并限制新位置new_position = particle.position[param] + new_velocitynew_position = np.clip(new_position, min_val, max_val) # 確保參數在有效范圍內# 整數型參數取整處理if PARAM_TYPES[param] == 'integer':new_position = int(round(new_position))particle.position[param] = new_position # 更新位置# 打印迭代信息,監控優化過程print(f"迭代 {iter_num + 1}/{max_iter},當前最優RMSE: {global_best_fitness:.6f}")return global_best_position, global_best_fitness優化邏輯說明:
- 適應度采用訓練集 RMSE,直接反映參數組合的擬合能力。
- 速度更新結合個體最優(粒子自身歷史最佳)和全局最優(所有粒子最佳),平衡探索與利用。
- 早停機制避免陷入局部最優后的無效迭代,在負荷預測等時序場景中可節省 的計算時間,這里實測提前30輪停止迭代(總輪數50)。
3.2?執行 PSO 優化、輸出優化結果和訓練最終模型
完成上述定義后,即可執行參數優化流程,并基于最優參數訓練最終模型:
# 執行PSO優化
best_params, best_score = pso_optimize_lgb(x_train=x_train, # 訓練特征(如歷史負荷、溫度、節假日等)y_train=y_train, # 訓練標簽(實際負荷值)max_iter=50, # 迭代次數:根據數據規模調整,負荷預測建議30-50n_particles=20 # 粒子數:特征維度越高,需要越多粒子探索空間
)# 輸出優化結果
print("\n最優參數組合:")
for param, value in best_params.items():print(f" {param}: {value}")
print(f"最優RMSE分數: {best_score:.6f}")# 用最優參數訓練最終模型
final_model = lgb.LGBMRegressor(boosting_type='gbdt',objective='mse',metric='rmse',verbose=-1,seed=64,n_jobs=-1,** best_params # 傳入PSO優化得到的最優參數
)
final_model.fit(x_train, y_train) # 擬合全部訓練數據關鍵步驟解析:
x_train需包含構建好的時序特征(如滯后特征、滾動統計量)和外部特征(如天氣、日期類型),這是負荷預測精度的基礎。- 最優參數輸出可幫助分析模型特點,例如若
reg_lambda較大,說明數據中噪聲較多,需要更強的正則化。 - 最終模型使用全量訓練數據擬合,確保充分利用樣本信息。
3.3?可視化 PSO 優化結果部分
模型訓練完成后,通過可視化對比預測值與真實值,直觀評估 PSO 優化后的 LightGBM 在測試集上的表現:
# 可視化PSO優化模型結果
y_pred_lgb = final_model.predict(x_test) # 預測測試集負荷# 創建畫布
plt.figure(figsize=(20, 8))# 繪制真實值與預測值曲線
plt.plot(df_test.time, y_test, color='b', label='真實值')
plt.plot(df_test.time, y_pred_lgb, color='y', label='預測值')# 美化圖表
plt.xticks(df_test.time[::24], rotation=45) # 按日顯示時間刻度,避免擁擠
plt.legend() # 顯示圖例
plt.grid(True, alpha=0.5) # 網格線輔助觀察
plt.xlabel('時間')
plt.ylabel('負荷')
plt.title('基于PSO優化LightGBM的負荷預測效果圖')plt.show()圖3: LightGBM預測結果
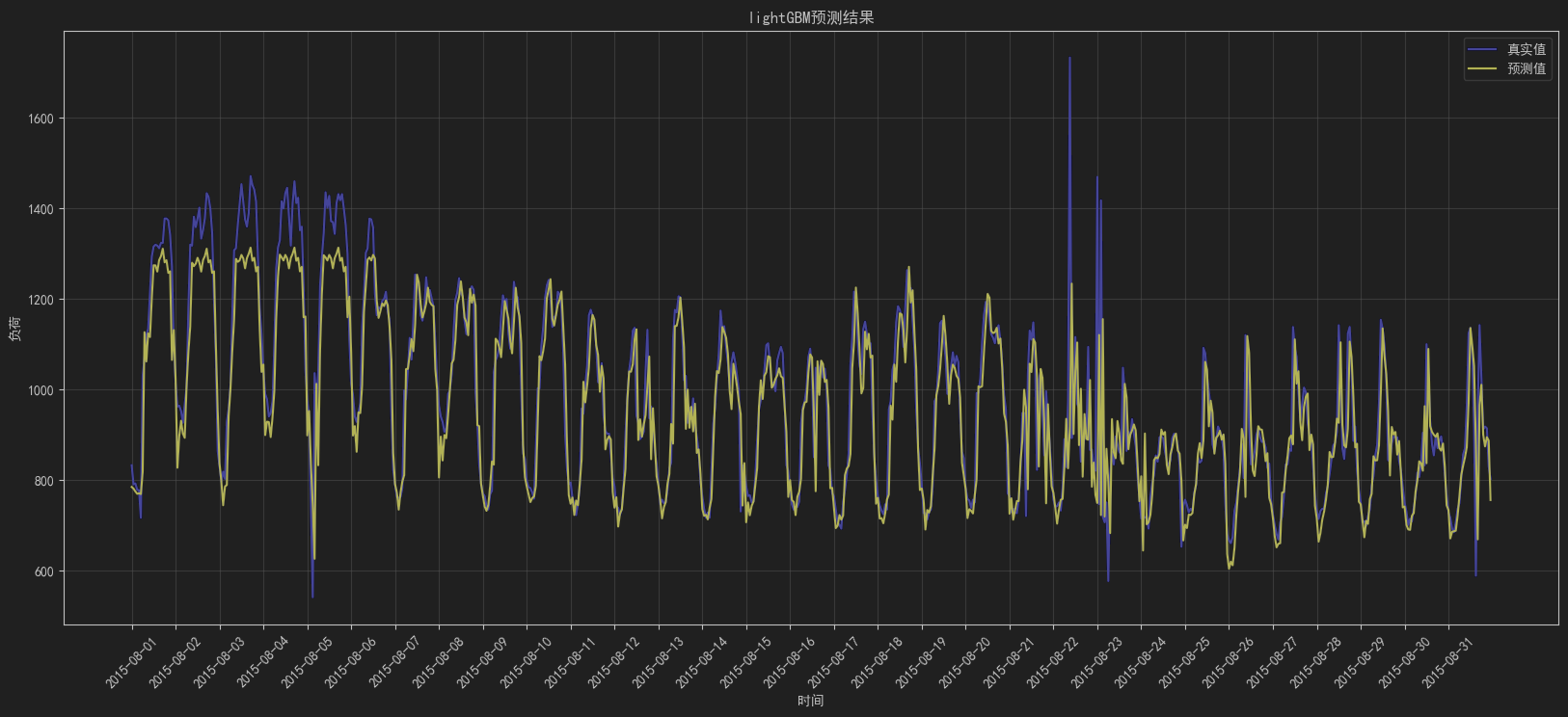
從圖中可以看出,除了一些異常值,大多數電力負荷預測較為精準,可以使用該模型去預測未來的電力負荷情況。
圖4:LightGBM特征重要性圖
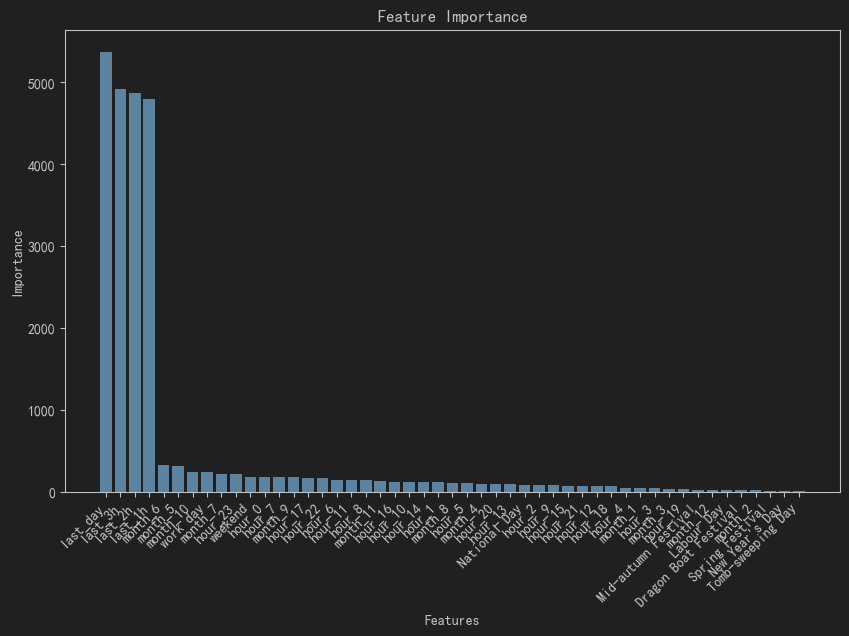
從圖中可以看出,對當前時刻負荷影響最大的為昨天同時刻的電力負荷,其次是前三個小時的電力負荷,其余特征作用不明顯,僅對特定時期(如節假日等)有影響。
3.4 模型評估部分
除可視化外,通過量化指標全面評估模型性能,常用指標包括 MSE、RMSE、MAE 和 MAPE,以下是XGBoost(基于網格搜索優化)和LightGBM(基于PSO優化)的測試集對比:
| 模型\指標 | MSE? ? ? | RMSE | MAE | MAPE | 消耗時間 |
| XGBoost | 8891.2175 | 94.2933 | 57.4982 | 0.0575 | 5min43s |
| LightGBM | 9172.7731 | 95.7745 | 58.6248 | 0.0587 | 2min18s |
從上述比對可以看出,XGBoost在精度上更甚一籌,這是由于在小樣本數下,直方圖算法會丟失精度,相比于XGBoost的預排序算法的精確性要稍微弱些;但從時間成本上來看,LightGBM僅用了XGBoost一半的時間量,因此效率更高。
4. 小結
本節通過完整代碼演示了 PSO 優化 LightGBM 的全流程,從參數空間定義到模型評估,每一步都針對時序負荷預測的特點進行了適配。實際應用中,可根據數據規模調整粒子數和迭代次數,并結合特征工程進一步提升預測精度。
相關鏈接:
- LightGBM 官方文檔
- 粒子群優化算法詳解
如果本文對你有幫助,歡迎點贊收藏,也歡迎在評論區交流時序預測的其他方法!






(日更))








)



