Buck 電路設計中,有兩個概念,一個是Load-Line,一個是DVS,它們的含義是什么呢。
Load-Line(也稱為有源電壓定位,AVP)是通過調整BUCK電路的輸出電壓,使其根據負載電流動態變化的技術。其公式為:

其中 VOUT(NOM) 是無負載連接到電源時的最大VOUT, IOUT 是負載電流,RLL 則是等效Load-Line阻抗。可以看到隨著Iout的增加,Vout線性下降。但VOUT 必須落在指定的電壓限制范圍 (VMAX 和 VMIN) 之內,使負載能夠正常工作。
Load-Line調節的主要目的是在負載電流較大時降低電壓,從而降低功耗和耗散損耗。這是它最常見的益處,實施Load-Line控制還有一個優點,就是可以改善服務器的動態響應。
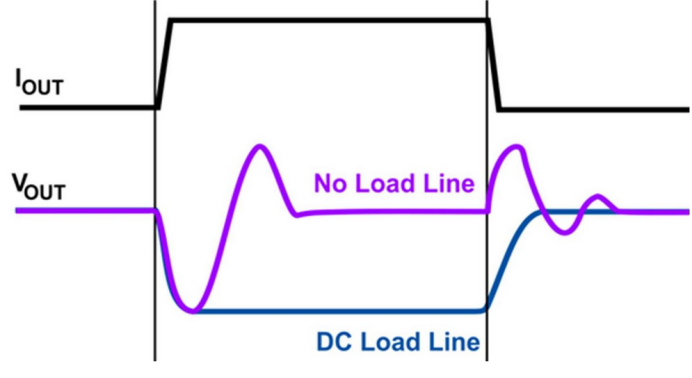
上圖是負載電流跳變時,有Load-Line和沒有Load-Line的響應圖。沒有Load-Line的電源(用紫色線表示)在負載瞬變期間會出現較大的過沖和下沖。這些峰值超過最大或最小電壓限制都可能導致負載損壞并停止工作,但通過使用Load-Line(用藍色線表示)逐步調節 VOUT,則可以消除這些峰值并改善瞬態響應
。
所以通過Load-Line的設計,可以優化瞬態響應性能,滿足服務器等對電壓波動敏感場景的需求;同時降低輸出電容容值要求,減小系統體積和成本。
DVS技術通過動態調整BUCK電路的?輸出電壓值?,在保證系統性能的前提下降低功耗,根據處理器負載狀態,實時調節供電電壓以匹配算力需求;應用于便攜設備(如手機、筆記本電腦),延長電池續航。
如給手機處理器供電的應用場景,可以將電源的供能模式可分為三個模式:省電模式(低壓低電流),平衡模式(低壓大電流),高性能模式(高壓大電流)。根據性能需要切換供能模式,這也是電源的最優化供電策略。
DVS 實現方式:?1)?數字控制?:采用PID算法或狀態空間模型,實現快速、無過沖的電壓切換;2)?硬件支持?:部分控制器集成VID(電壓識別)引腳,通過數字信號直接設定目標電壓。
兩者的區別與聯系為:


)






——路由和pinia)



—命令模式)




:Pandas 進階)

![【BUUCTF系列】[HCTF 2018]WarmUp1](http://pic.xiahunao.cn/【BUUCTF系列】[HCTF 2018]WarmUp1)