一、加速器模塊的運行方式
1. 傳感器數據采集與融合 ?
加速度計核心作用:測量三維線性加速度(X/Y/Z軸),結合陀螺儀(角速度)和磁力計(方向)構成九軸姿態傳感器,實時輸出無人機運動狀態。 ?
數據融合流程:通過擴展卡爾曼濾波(EKF)或互補濾波,將多傳感器數據融合為姿態角,為控制系統提供穩定輸入。
2. 控制指令生成與動力響應 ?
飛控算法處理:加速器數據輸入飛控單元,結合目標軌跡生成電機調速指令。例如,前向加速需增加前部電機轉速并降低后部轉速。 ?
動力系統響應:電調(ESC)將指令轉換為電機電流,驅動無刷電機調整推力。六推無人機通過多旋翼差動實現復雜機動。
3. 環境交互與自適應調整 ?
實時避障與路徑規劃:高端無人機通過視覺慣性里程計(VIO)和SLAM算法,結合加速度數據動態調整路徑。例如,檢測到側向加速度突變時觸發避障策略。 ?
量子通信中繼場景:無人機搭載光學中繼器時,加速度數據用于穩定光束跟蹤系統,確保量子糾纏光子分發精度。
二、核心技術要點
1.多傳感器融合與濾波優化
卡爾曼濾波應用:針對加速度計噪聲,采用遞歸預測-校正機制:
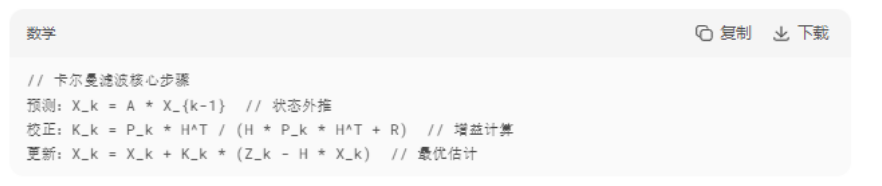
此方法將位移積分誤差降低50%以上。 ?
自適應濾波增強:結合IMU溫度漂移模型,動態調整協方差矩陣,提升高溫/高振環境下的精度。
2. 邊緣計算與實時處理
高性能嵌入式平臺:如NVIDIA Jetson Orin NX或Jetson Nano,支持實時運行深度學習模型,處理延時<10ms。 ?
輕量化設計:AAEON BOXER-8224AI模塊通過晶圓級連接器集成雙MIPI CSI攝像頭,實現毫米級波前整形。
3. 通信與抗干擾技術 ?
量子鏈路抗電磁干擾:無人機搭載光學中繼節點,通過APT系統維持強電磁環境下的通信穩定性。?
4G圖傳冗余設計:DJI Matrice系列采用LTE網卡套件,在GPS失效時通過蜂窩網絡回傳加速度數據。
三、技術難點與挑戰
1. 小型化與功耗平衡 ?
載荷限制:量子中繼無人機需在11.8kg載荷內集成單光子發射器、APT系統及冷卻模塊,光學器件尺寸需壓縮至厘米級。 ?
功耗優化:Jetson Orin模塊通過動態電壓頻率調整將功耗控制在15W內,但高算力任務仍限制續航至40分鐘。
2. 抗干擾與環境適應性
復雜電磁環境:太陽輻射干擾下,常規電磁通信失效,需依賴量子通信或聲學定位(水下無人機)。 ?
多物理場耦合:高溫導致傳感器漂移,如環日加速器模塊需自轉散熱,而無人機需主動冷卻系統保護電子器件。
3. 實時性與精度矛盾 ?
積分累計誤差:加速度二次積分產生的位移誤差隨時間指數增長,水下無人機定位偏差可達米級/小時。 ?
高動態響應延遲:急加速時電機響應滯后(>50ms)可能導致姿態失控,需預測控制算法補償。
四、前沿發展趨勢
量子通信集成:南京大學團隊實現無人機中繼的糾纏光子分發,未來或用于構建空基量子網絡。 ?
智能自適應感知:中科院西安光機所提出“空譜自適應泛化”模型,結合多矩形嵌套飛行方案,將地物分類精度提升至97.23%。 ?
算力-感知一體化:SU17-Orin選配包支持FAST-LIVO2激光雷達-視覺緊耦合SLAM,實現復雜環境厘米級建圖。
總結
無人機加速器模塊的技術核心在于多源數據融合、實時濾波與高魯棒性控制,其難點集中于小型化、抗干擾和精度維持。未來將更依賴邊緣AI算力和新型通信技術,以實現全自主集群協作與極端環境作業。
表:無人機加速器模塊性能對比 ?










集群部署(超詳細))


:Spring Boot + AI + DeepSeek 構建智能合同分析技術實踐(附完整源碼))
指定格式的字符串)


)



溫度和使用狀況)