要求:
1.理論分析
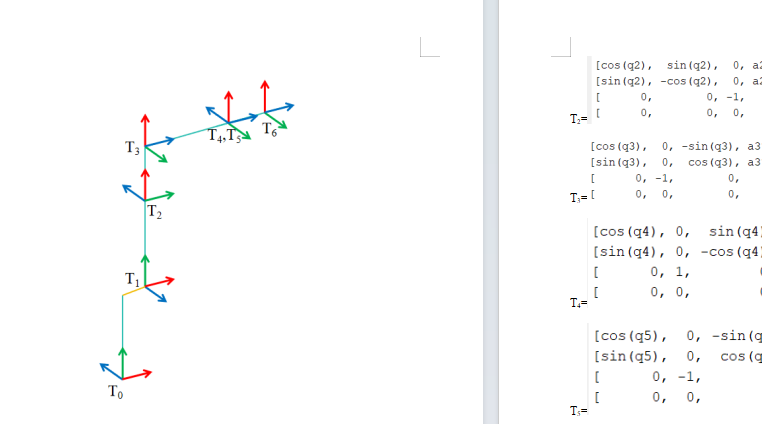
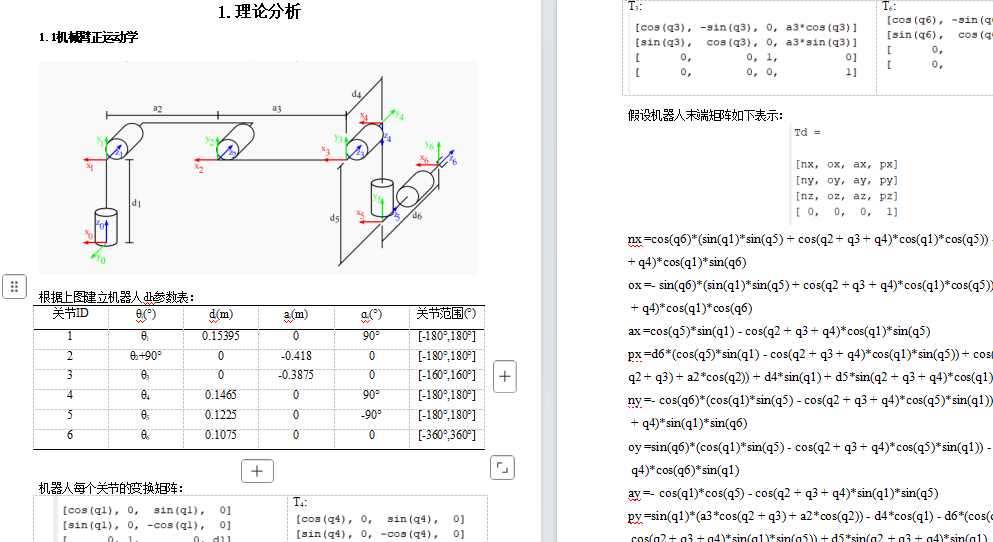
1.1 正向運動學:根據D-H法完成機器人的正向運動學(數學建模后基于Matlab計算公式);
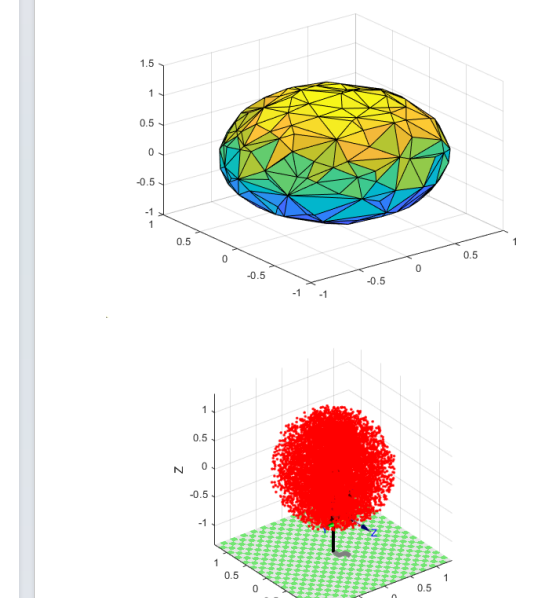
1.2 工作空間分析:根據正向運動學結果,運用 MATLAB進行工作空間分析,完成工作空間點云圖和包絡圖;
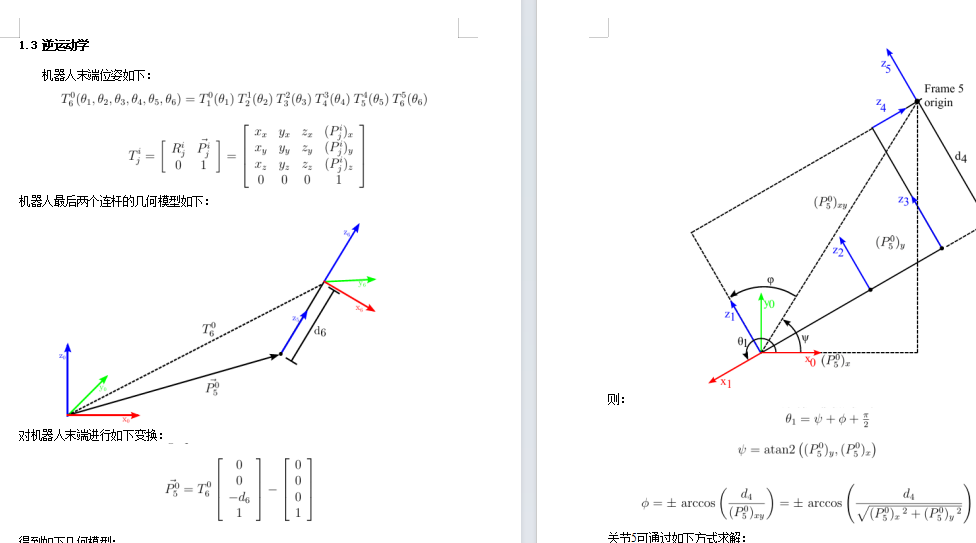
1.3 逆向運動學:根據正向運動學結果推導逆向運動學公式(封閉逆解);
2.基于Matlab Robotics Toolbox的機器人仿真分析
2.1 基于Matlab Robotics Toolbox完成機器人模型的建立;
2.2 在工作空間中規劃一條工作任務軌跡,完成基于關節空間的軌跡規劃;
2.2.1 在工作空間中規劃一條工作任務軌跡,可利用teach功能輔助完成;
2.2.2 找到工作任務上的關鍵示教點,求出其運動學逆解,并帶入1.3中驗證逆向運動學公式的正確性;
2.2.3 在關鍵示教點間完成基于關節空間的軌跡規劃,并基于Matlab Robotics Toolbox顯示帶有末端軌跡的動態運動結果。
打賞請鏈接:飛舞的哲?
1.ER12-2100





2.ER12H-2000



3.ER25-2700


4.ER35-1800


5.EXR210-2700


6.GR1600-1700




7.ER15-1400



8.ER15H-1400



9.ER50-1900



10.ER10-700



11.GR6160-3200




12.ECR5





)







和函數(function))








