????????其實筆者以前學51的時候按鍵功能就包含非阻塞式的,而且還包括矩陣按鍵的非組塞式按鍵實現。開關的長短鍵功能筆者在之前的51博文中筆者自己嘗試寫過,功能是有了但寫的其實很混亂,幾乎沒有移植的價值。這次江科大剛好出了新的教程,又重新學習了一下。剛好學到江科大關于串口通信部分,了解了狀態機的形式,思路相比以前突然打開了,以前自己寫代碼總覺得狀態標志是個很好的參數,因為他可以幫助區分工作流程的各個狀態。
? ? ? ? 這次江科大的代碼沒了注釋筆者自己注釋了一下。
key.c
#include "stm32f10x.h" // Device header
#include "Key.h"/*映射區還有一些在頭文件Key.h文件里*/
#define KEY_PRESSED 1 //按鍵按下
#define KEY_UNPRESSED 0//按鍵松開#define KEY_TIME_DOUBLE 200
#define KEY_TIME_LONG 2000
#define KEY_TIME_REPEAT 100
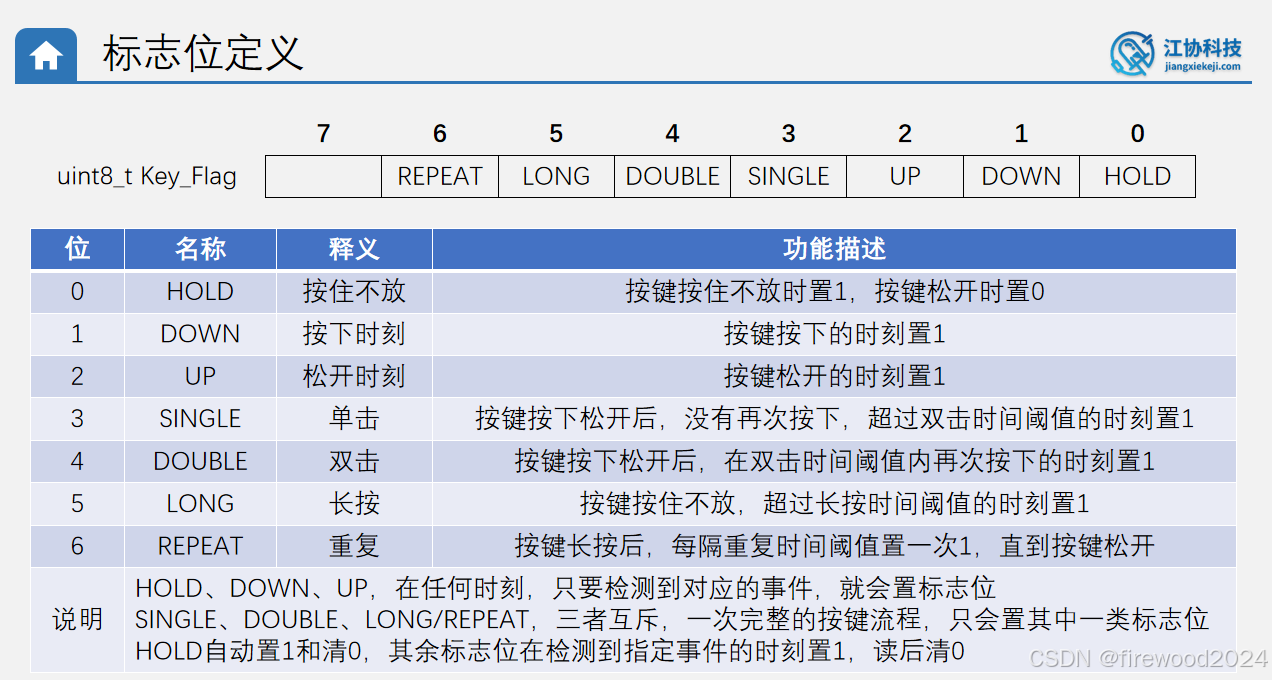
/* Key_Flag bit6~bit0 分別代表REPEAT(bit6)、Long、Double、Single、UP、Down、HOLD,bit7是空位 */
uint8_t Key_Flag[KEY_COUNT];//定義全局變量標志位每個標志位互相獨立,不同的標志位代表不同的事件void Key_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);/*按鍵使能GPIO初始化,常態是高電平按下是低電平*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);/*按鍵使能GPIO初始化,常態是低電平按下是高電平*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
}uint8_t Key_GetState(uint8_t n) //檢測當前按鍵的電平,并返回相應的電平信息
{if (n == KEY_1){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){return KEY_PRESSED;}}else if (n == KEY_2){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0){return KEY_PRESSED;}}else if (n == KEY_3){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13) == 1){return KEY_PRESSED;}}else if (n == KEY_4){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_15) == 1){return KEY_PRESSED;}}return KEY_UNPRESSED;
}
/*** 函 數:開關狀態檢測函數* 參 數:uint8_t n 指定開關編號,可在 KEY_1 KEY_2 KEY_3 KEY_4選擇如需擴展可在KEY.h中添加,KEY_1的值是0 KEY_2的值是1,看頭文件的定義* 參 數:uint8_t Flag指定開關的狀態可在下面參數中現在
// KEY_HOLD :按住開關
// KEY_DOWN :按下開關
// KEY_UP :開關彈起 這三項一般不作為參數檢測KEY_SINGLE :單擊KEY_DOUBLE :雙擊KEY_LONG : 長按KEY_REPEAT : 重復,即一直按住。 后4項狀態是互斥的但是和前三項可以
* 返 回 值:如果開關狀態是例舉(uint8_t Flag)的狀態則返回1,如果不是則返回0
* 注意事項:開關狀態Key_Flag[n]不一定和uint8_t Flag*/
uint8_t Key_Check(uint8_t n, uint8_t Flag)//開關狀態檢測
{if (Key_Flag[n] & Flag)//開關的7個狀態FLAG是互斥,一個狀態只占一位比如單擊 0000 1000,只有開關確實是處于單擊狀態開關的結果才是非0的{if (Flag != KEY_HOLD) //這個函數就是保證不清除bit0位置的狀態{Key_Flag[n] &= ~Flag; //相應的bit控制位清0,其它位保持}return 1;}return 0;
}void Key_Tick(void)
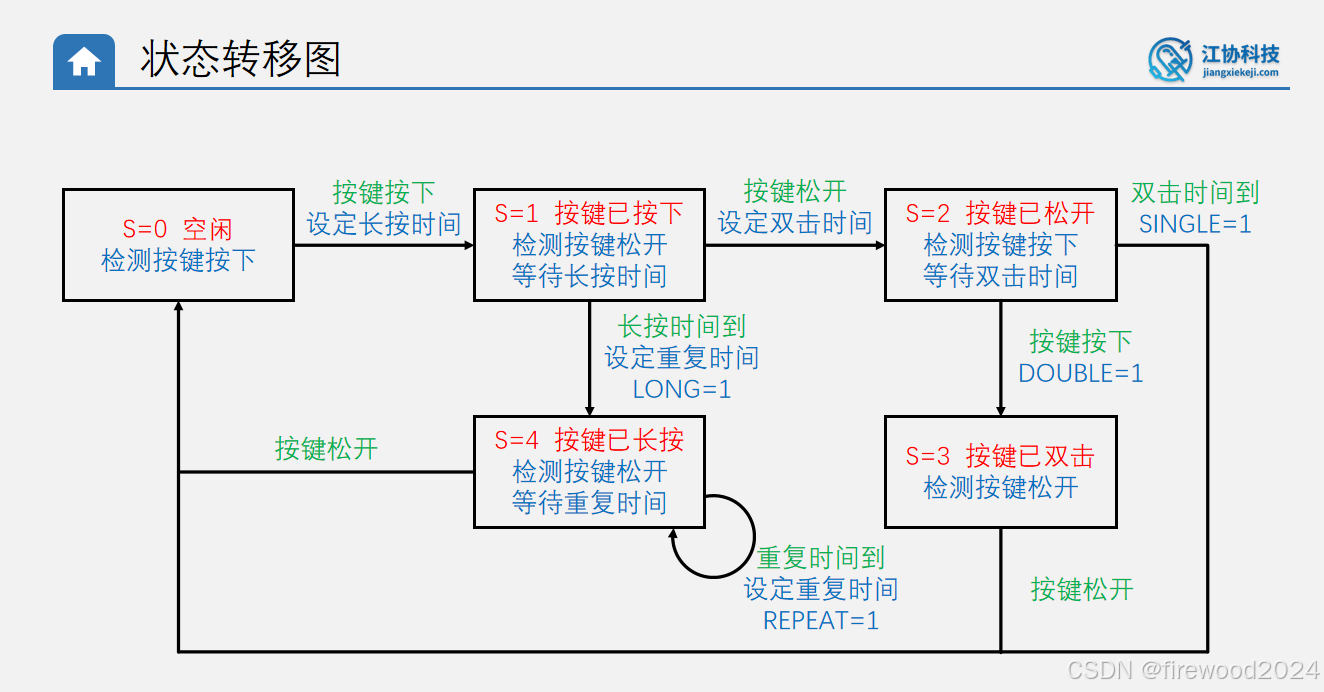
{static uint8_t Count, i;//定義靜態變量i和Countstatic uint8_t CurrState[KEY_COUNT], PrevState[KEY_COUNT];//定義現態和前態static uint8_t S[KEY_COUNT];//定義狀態static uint16_t Time[KEY_COUNT];//for (i = 0; i < KEY_COUNT; i ++)//KEY_COUNT的值在Key.H中定義了{if (Time[i] > 0){Time[i] --; //對應開關的時間減1}}Count ++;if (Count >= 20)//每20ms進入一次這個函數{Count = 0;for (i = 0; i < KEY_COUNT; i ++)//歷遍所有的開關狀態{PrevState[i] = CurrState[i];//當Key_GetState(i)獲得新狀態時代表著CurrState里面的狀態就是前態了CurrState[i] = Key_GetState(i);//把開關狀態賦值給現態if (CurrState[i] == KEY_PRESSED)//如果檢測到開關按下則標志位HOLD置1{Key_Flag[i] |= KEY_HOLD; //KEY_HOLD = 0000 0001則bit 0 置1其它位保持。}else//如果沒檢測到開關按下則標志位HOLD置0{Key_Flag[i] &= ~KEY_HOLD;//,~KEY_HOLD = 1111 1110 則bit 0置0其它位保持。}if (CurrState[i] == KEY_PRESSED && PrevState[i] == KEY_UNPRESSED)//如果現態是按下前態是沒有按下{Key_Flag[i] |= KEY_DOWN; // KEY_DOWN = 0000 0010 則bit 1置1其它位保持}if (CurrState[i] == KEY_UNPRESSED && PrevState[i] == KEY_PRESSED)//如果現態是彈起前態是按下{Key_Flag[i] |= KEY_UP; // KEY_UP = 0000 0100則bit 2 置1其它位保持}if (S[i] == 0) //如果對應開關處于空閑狀態{if (CurrState[i] == KEY_PRESSED) //如果現態的開關狀態時按下{Time[i] = KEY_TIME_LONG; //對應開關的時間設置為2000即長按檢測S[i] = 1;//開關由0態進入1態}}else if (S[i] == 1) //如果對應開關處于狀態1{if (CurrState[i] == KEY_UNPRESSED)//如果現態開關狀態是彈起{Time[i] = KEY_TIME_DOUBLE; //對應開關時間設置為200S[i] = 2;//開關由1態進入2態}else if (Time[i] == 0) //如果對應開關時間為0{Time[i] = KEY_TIME_REPEAT; //開關時間設置為100Key_Flag[i] |= KEY_LONG;//KEY_LONG = 0010 0000,則對應標志位bit5 置1其它位保持S[i] = 4; //開關由1態進人4態,}}else if (S[i] == 2) //如果對應開關處于2態{if (CurrState[i] == KEY_PRESSED)//如果檢測到開關處于按住狀態{Key_Flag[i] |= KEY_DOUBLE;//對應開關設置標志位 KEY_DOUBLE = 0001 0000,bit4 置1其它位保持S[i] = 3;//開關進入狀態3,說明按鍵已然雙擊}else if (Time[i] == 0)//否則的話檢測對應開關的時間是否為0{Key_Flag[i] |= KEY_SINGLE; //對應開關設置標志位 KEY_SINGLE = 0000 1000,bit3 置1其它位保持S[i] = 0; //開關狀態由2態回到狀態0}}else if (S[i] == 3)//如果對應開關處于狀態3{if (CurrState[i] == KEY_UNPRESSED)//如果對應開關現態是彈起{S[i] = 0;//開關由3態回到狀態0}}else if (S[i] == 4)//如果對應開關處于狀態4{if (CurrState[i] == KEY_UNPRESSED)//如果對應開關現態是彈起{S[i] = 0;//開關由4態回到狀態0}else if (Time[i] == 0)//如果對應時間是0{Time[i] = KEY_TIME_REPEAT; //對應開關設置為重復按鍵時間100Key_Flag[i] |= KEY_REPEAT; //對應開關標志位設置為 KEY_REPEAT = 0100 0000 bit6 置1其它位保持S[i] = 4;//開關已然處于4態}}}}
}
添一下編程思路
當然這篇也不是來分享注釋的,縱觀江科大的代碼,在開關穩態的判斷上稍顯簡陋。因此筆者擴展了一下代碼,1)現在代碼對穩態有了更強的判斷 2)對數組的邊界進行了判斷,防止超過邊界程序不工作。
????????對應代碼移植的注意點:1)確定KEY_COUNT的值以降低資源的消耗不一定要一直設置為4,用幾個設置幾個就行? 2)添加了按鍵開關宏定義? ?3)添加了GPIO口宏定義?
在這幾個宏定義里修改參數無需在模塊中修改即可拿來使用。一般來說雙擊是很少用的功能,關于如果屏蔽這個功能,宏定義中#define KEY_TIME_DOUBLE? ?1原先的200改成1,程序就不會檢測到雙擊,就只剩單擊和長按功能了。
筆者的穩態加強判斷代碼:
/*有歷史的開關狀態判定*/
uint16_t Key_SteadyState(uint8_t n)
{if (n >= KEY_COUNT) {return 0; // 索引越界時直接返回0,不執行后續操作}
if (n == KEY_1){if (Keybuf[KEY_1] == 0xFFFF){return KEY_PRESSED;}}if (n == KEY_2){if (Keybuf[KEY_2] == 0xFFFF){return KEY_PRESSED;}}if (n == KEY_3){if (Keybuf[KEY_3] == 0xFFFF){return KEY_PRESSED;}} if (n == KEY_4){if (Keybuf[KEY_4] == 0xFFFF){return KEY_PRESSED;}} return KEY_UNPRESSED;
}????????這也是筆者學51時候宋老師給出的編程思路,按下開關獲得的狀態是1,每1ms進入中斷一次并移位一次把結果存入緩沖值Keybuf[i],因此只要判斷Keybuf的值就能知道過去的16ms是不是處于穩態。如果keybuf[i] =0x0000,則說明前16ms開關一直松開,如果keybuf[i] = 0xffff,則說明開關一直按著。當然本案的代碼是只要其中有1位沒置1,那么進行狀態判斷的時候就認為開關不是按著而是彈開.即對按著有更強的要求,反過來對松開是弱要求(在過去的16ms中如果電平有跳動就判斷松開)因為現在的程序的寫法是兩態判斷。考慮到每20ms才進行一次開關狀態判斷,而不是開關穩態發生變化就馬上進行功能判斷,在響應上會有一些延遲,對應響應要求快速的地方,該方案也許還要調整,因此要結合實際的應用場景選擇合適方案。
key.c
#include "stm32f10x.h" // Device header
#include "Key.h"
/*映射區*/#define KEY_PRESSED 1 //按鍵按下
#define KEY_UNPRESSED 0//按鍵松開/*開關閾值時間*/
#define KEY_TIME_DOUBLE 200//把該處的值調低比如設置為1那么程序就不可能檢測到雙擊,變相的屏蔽了雙擊功能
#define KEY_TIME_LONG 2000
#define KEY_TIME_REPEAT 100
/*GPIO口宏定義開關KEY_1 KEY_2都是GPIOB,第二組KEY_3 KEY_4也是GPIOB*/
#define GPIO_KEY_1 GPIO_Pin_1
#define GPIO_KEY_2 GPIO_Pin_11
#define GPIOX_KEY1_KEY2 GPIOB
#define GPIO_KEY_3 GPIO_Pin_13
#define GPIO_KEY_4 GPIO_Pin_15
#define GPIOX_KEY3_KEY4 GPIOB/* Key_Flag bit6~bit0 分別代表REPEAT(bit6)、Long、Double、Single、UP、Down、HOLD,bit7是空位 */
uint8_t Key_Flag[KEY_COUNT] = {0};//定義全局變量標志位每個標志位互相獨立,不同的標志位代表不同的事件
uint16_t Keybuf[KEY_COUNT] = {0x0000};void Key_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);/*按鍵使能GPIO初始化,常態是高電平按下是低電平*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_KEY_1 | GPIO_KEY_2;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOX_KEY1_KEY2, &GPIO_InitStructure);/*按鍵使能GPIO初始化,常態是低電平按下是高電平*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;GPIO_InitStructure.GPIO_Pin = GPIO_KEY_3 | GPIO_KEY_4;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOX_KEY3_KEY4, &GPIO_InitStructure);
}
/*檢測當前按鍵的電平,并返回相應的電平信息即開關狀態*/
uint16_t Key_GetState(uint8_t n)
{if (n >= KEY_COUNT) {return 0; // 索引越界時直接返回0,不執行后續操作}if (n == KEY_1){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){return KEY_PRESSED;}}else if (n == KEY_2){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0){return KEY_PRESSED;}}else if (n == KEY_3){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13) == 1){return KEY_PRESSED;}}else if (n == KEY_4){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_15) == 1){return KEY_PRESSED;}}return KEY_UNPRESSED;
}
/*有歷史的開關狀態判定*/
uint16_t Key_SteadyState(uint8_t n)
{if (n >= KEY_COUNT) {return 0; // 索引越界時直接返回0,不執行后續操作}
if (n == KEY_1){if (Keybuf[KEY_1] == 0xFFFF){return KEY_PRESSED;}}if (n == KEY_2){if (Keybuf[KEY_2] == 0xFFFF){return KEY_PRESSED;}}if (n == KEY_3){if (Keybuf[KEY_3] == 0xFFFF){return KEY_PRESSED;}} if (n == KEY_4){if (Keybuf[KEY_4] == 0xFFFF){return KEY_PRESSED;}} return KEY_UNPRESSED;
}/*** 函 數:開關狀態檢測函數* 參 數:uint8_t n 指定開關編號,可在 KEY_1 KEY_2 KEY_3 KEY_4選擇如需擴展可在KEY.h中添加,KEY_1的值是0 KEY_2的值是1,看頭文件的定義* 參 數:uint8_t Flag指定開關的狀態可在下面參數中選擇
// KEY_HOLD :按住開關
// KEY_DOWN :按下開關
// KEY_UP :開關彈起 這三項一般不作為參數檢測KEY_SINGLE :單擊KEY_DOUBLE :雙擊KEY_LONG : 長按KEY_REPEAT : 重復,即一直按住。 后4項狀態是互斥的但是和前三項可以共存
* 返 回 值:如果開關狀態是例舉(uint8_t Flag)的狀態則返回1,如果不是則返回0
* 注意事項:開關狀態Key_Flag[n]不一定和uint8_t Flag相同*/
uint8_t Key_Check(uint8_t n, uint8_t Flag)//開關狀態檢測
{/* 添加邊界檢查:確保 n 在有效索引范圍內 */if (n >= KEY_COUNT) {return 0; // 索引越界時直接返回0,不執行后續操作}if (Key_Flag[n] & Flag)//開關的7個狀態FLAG一個狀態只占一位比如單擊 0000 1000,只有開關確實是處于單擊狀態開關的結果才是非0的{if (Flag != KEY_HOLD) //這個函數就是保證不清除bit0位置的狀態{Key_Flag[n] &= ~Flag; //相應的bit控制位清0,其它位保持}return 1;}return 0;
}void Key_Tick(void)
{static uint8_t Count, i;//定義靜態變量i和Countstatic uint8_t CurrState[KEY_COUNT], PrevState[KEY_COUNT];//定義現態和前態static uint8_t S[KEY_COUNT] ={0};//定義狀態static uint16_t Time[KEY_COUNT] = {0};//定義開關時間for (i = 0; i < KEY_COUNT; i ++)//遍歷所有的開關,KEY_COUNT的值在Key.H中定義了{Keybuf[i] = (Keybuf[i] << 1) | Key_GetState(i) ;//當前的開關狀態賦值給狀態監控數組if (Time[i] > 0){Time[i] --; //對應開關的時間減1}}Count ++;if (Count >= 20)//每20ms進入一次這個函數{Count = 0;for (i = 0; i < KEY_COUNT; i ++)//歷遍所有的開關狀態{PrevState[i] = CurrState[i];//當Key_GetState(i)獲得新狀態時代表著CurrState里面的狀態就是前態了CurrState[i] =Key_SteadyState(i) ;//把穩定的開關狀態賦值給現態if (CurrState[i] == KEY_PRESSED)//如果檢測到開關按下則標志位HOLD置1{Key_Flag[i] |= KEY_HOLD; //KEY_HOLD = 0000 0001則bit 0 置1其它位保持。}else//如果沒檢測到開關按下則標志位HOLD置0{Key_Flag[i] &= ~KEY_HOLD;//,~KEY_HOLD = 1111 1110 則bit 0置0其它位保持。}if (CurrState[i] == KEY_PRESSED && PrevState[i] == KEY_UNPRESSED)//如果現態是按下前態是沒有按下{Key_Flag[i] |= KEY_DOWN; // KEY_DOWN = 0000 0010 則bit 1置1其它位保持}if (CurrState[i] == KEY_UNPRESSED && PrevState[i] == KEY_PRESSED)//如果現態是彈起前態是按下{Key_Flag[i] |= KEY_UP; // KEY_UP = 0000 0100則bit 2 置1其它位保持}if (S[i] == 0) //如果對應開關處于空閑狀態{if (CurrState[i] == KEY_PRESSED) //如果現態的開關狀態時按下{Time[i] = KEY_TIME_LONG; //對應開關的時間設置為2000即長按檢測S[i] = 1;//開關由0態進入1態}}else if (S[i] == 1) //如果對應開關處于狀態1{if (CurrState[i] == KEY_UNPRESSED)//如果現態開關狀態是彈起{Time[i] = KEY_TIME_DOUBLE; //對應開關時間設置為200S[i] = 2;//開關由1態進入2態}else if (Time[i] == 0) //如果對應開關時間為0{Time[i] = KEY_TIME_REPEAT; //開關時間設置為100Key_Flag[i] |= KEY_LONG;//KEY_LONG = 0010 0000,則對應標志位bit5 置1其它位保持S[i] = 4; //開關由1態進人4態,}}else if (S[i] == 2) //如果對應開關處于2態{if (CurrState[i] == KEY_PRESSED)//如果檢測到開關處于按住狀態{Key_Flag[i] |= KEY_DOUBLE;//對應開關設置標志位 KEY_DOUBLE = 0001 0000,bit4 置1其它位保持S[i] = 3;//開關進入狀態3,說明按鍵已然雙擊}else if (Time[i] == 0)//否則的話檢測對應開關的時間是否為0{Key_Flag[i] |= KEY_SINGLE; //對應開關設置標志位 KEY_SINGLE = 0000 1000,bit3 置1其它位保持S[i] = 0; //開關狀態由2態回到狀態0}}else if (S[i] == 3)//如果對應開關處于狀態3{if (CurrState[i] == KEY_UNPRESSED)//如果對應開關現態是彈起{S[i] = 0;//開關由3態回到狀態0}}else if (S[i] == 4)//如果對應開關處于狀態4{if (CurrState[i] == KEY_UNPRESSED)//如果對應開關現態是彈起{S[i] = 0;//開關由4態回到狀態0}else if (Time[i] == 0)//如果對應時間是0{Time[i] = KEY_TIME_REPEAT; //對應開關設置為重復按鍵時間100Key_Flag[i] |= KEY_REPEAT; //對應開關標志位設置為 KEY_REPEAT = 0100 0000 bit6 置1其它位保持S[i] = 4;//回到狀態4}}}}
}
key.h
#ifndef __KEY_H
#define __KEY_H/*使能開關的個數,根據工程的需要更該參數*/
#define KEY_COUNT 4
/*開關命名索引,宏命令取的值與for循環的i有關且是一一對應的因此取值要連續不能隨意錯位,跳過某個數取值的方式,比如0,4,1,3這種順序是不允許的*/
#define KEY_1 0
#define KEY_2 1
#define KEY_3 2
#define KEY_4 3
/* 參數修改區,按工程需要重命名開關名字*/
#define Key_Safe KEY_1 // 安全開關
#define Key_Start KEY_2 // 啟動開關
#define Key_Stop KEY_3 // 停止開關
#define Key_Reset KEY_4 // 復位開關#define KEY_HOLD 0x01 //0000 0001
#define KEY_DOWN 0x02 //0000 0010
#define KEY_UP 0x04 //0000 0100
#define KEY_SINGLE 0x08 //0000 1000
#define KEY_DOUBLE 0x10 //0001 0000
#define KEY_LONG 0x20 //0010 0000
#define KEY_REPEAT 0x40 //0100 0000void Key_Init(void);
uint8_t Key_Check(uint8_t n, uint8_t Flag);
void Key_Tick(void);#endif
從邏輯上來講后面的程序對穩態的判斷更嚴格,不同場景的使用要求可以按需調整,比如穩態判斷采用8位的,那么時間就是 8ms,count的值改小一點。
貼一個對開關穩態強要求的即在原先的方案上再稍微調整一下
#define KEY_PRESSED 1 //按鍵按下
#define KEY_UNPRESSED 0//按鍵松開
#define KEY_Unsteadystate 2//開關不穩定/*有歷史的開關狀態判定*/
uint16_t Key_SteadyState(uint8_t n)
{if (n >= KEY_COUNT) {return KEY_Unsteadystate; // 索引越界時也歸于開關處于不穩定狀態}if (Keybuf[n] == 0xFFFF) {return KEY_PRESSED;}else if (Keybuf[n] == 0x0000) {return KEY_UNPRESSED;}return KEY_Unsteadystate;
}當然如果你要用這個開關三態的函數的話后續的函數也要調整一下
if (CurrState[i] == KEY_PRESSED && PrevState[i] != KEY_PRESSED)//如果現態是按下前態是沒有按下{Key_Flag[i] |= KEY_DOWN; // KEY_DOWN = 0000 0010 則bit 1置1其它位保持}if (CurrState[i] == KEY_UNPRESSED && PrevState[i] != KEY_UNPRESSED)//如果現態是彈起前態是按下{Key_Flag[i] |= KEY_UP; // KEY_UP = 0000 0100則bit 2 置1其它位保持}基于此筆者又修改了程序,現在開關不在是20ms進行一次狀態判斷,而是程序檢測到開關穩態發生變化的時候,立刻就進入開關動作函數進行工作。
key.c
#include "stm32f10x.h" // Device header
#include "Key.h"
/*映射區*/#define KEY_PRESSED 1 //按鍵按下
#define KEY_UNPRESSED 0//按鍵松開
#define KEY_Unsteadystate 2//開關不穩定/*開關閾值時間*/
#define KEY_TIME_DOUBLE 200//把該處的值調低比如設置為1那么程序就不可能檢測到雙擊,變相的屏蔽了雙擊功能
#define KEY_TIME_LONG 2000
#define KEY_TIME_REPEAT 100
/*GPIO口宏定義開關KEY_1 KEY_2都是GPIOB,第二組KEY_3 KEY_4也是GPIOB*/
#define GPIO_KEY_1 GPIO_Pin_1
#define GPIO_KEY_2 GPIO_Pin_11
#define GPIOX_KEY1_KEY2 GPIOB
#define GPIO_KEY_3 GPIO_Pin_13
#define GPIO_KEY_4 GPIO_Pin_15
#define GPIOX_KEY3_KEY4 GPIOB/* Key_Flag bit6~bit0 分別代表REPEAT(bit6)、Long、Double、Single、UP、Down、HOLD,bit7是空位 */
uint8_t Key_Flag[KEY_COUNT] = {0};//定義全局變量標志位每個標志位互相獨立,不同的標志位代表不同的事件
uint16_t Keybuf[KEY_COUNT] = {0x0000};//開關穩態指示void Key_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);/*按鍵使能GPIO初始化,常態是高電平按下是低電平*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_KEY_1 | GPIO_KEY_2;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOX_KEY1_KEY2, &GPIO_InitStructure);/*按鍵使能GPIO初始化,常態是低電平按下是高電平*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;GPIO_InitStructure.GPIO_Pin = GPIO_KEY_3 | GPIO_KEY_4;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOX_KEY3_KEY4, &GPIO_InitStructure);
}
/*檢測當前按鍵的電平,并返回相應的電平信息即開關狀態*/
uint16_t Key_GetState(uint8_t n)
{if (n >= KEY_COUNT) {return 0; // 索引越界時直接返回0,不執行后續操作}if (n == KEY_1){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){return KEY_PRESSED;}}else if (n == KEY_2){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0){return KEY_PRESSED;}}else if (n == KEY_3){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13) == 1){return KEY_PRESSED;}}else if (n == KEY_4){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_15) == 1){return KEY_PRESSED;}}return KEY_UNPRESSED;
}
/*有歷史的開關狀態判定*/
uint16_t Key_Get_SteadyState(uint8_t n)
{if (n >= KEY_COUNT) {return KEY_Unsteadystate; // 索引越界時,歸于開關處于穩定狀態}if (Keybuf[n] == 0xFFFF) {return KEY_PRESSED;}else if (Keybuf[n] == 0x0000) {return KEY_UNPRESSED;}return KEY_Unsteadystate;
}/*** 函 數:開關狀態檢測函數* 參 數:uint8_t n 指定開關編號,可在 KEY_1 KEY_2 KEY_3 KEY_4選擇如需擴展可在KEY.h中添加,KEY_1的值是0 KEY_2的值是1,看頭文件的定義* 參 數:uint8_t Flag指定開關的狀態可在下面參數中選擇
// KEY_HOLD :按住開關
// KEY_DOWN :按下開關
// KEY_UP :開關彈起 這三項一般不作為參數檢測KEY_SINGLE :單擊KEY_DOUBLE :雙擊KEY_LONG : 長按KEY_REPEAT : 重復,即一直按住。 后4項狀態是互斥的但是和前三項可以共存
* 返 回 值:如果開關狀態是例舉(uint8_t Flag)的狀態則返回1,如果不是則返回0
* 注意事項:開關狀態Key_Flag[n]不一定和uint8_t Flag相同*/
uint8_t Key_Check(uint8_t n, uint8_t Flag)//開關狀態檢測
{/* 添加邊界檢查:確保 n 在有效索引范圍內 */if (n >= KEY_COUNT) {return 0; // 索引越界時直接返回0,不執行后續操作}if (Key_Flag[n] & Flag)//開關的7個狀態FLAG一個狀態只占一位比如單擊 0000 1000,只有開關確實是處于單擊狀態開關的結果才是非0的{if (Flag != KEY_HOLD) //這個函數就是保證不清除bit0位置的狀態{Key_Flag[n] &= ~Flag; //相應的bit控制位清0,其它位保持}return 1;}return 0;
}void Key_Tick(void)
{static uint8_t i;//定義靜態變量i和Countstatic uint8_t CurrState[KEY_COUNT] ={0}, PrevState[KEY_COUNT]={0};//定義現態和前態static uint8_t S[KEY_COUNT] ={0};//定義狀態static uint16_t Time[KEY_COUNT] = {0};//定義開關時間for (i = 0; i < KEY_COUNT; i ++)//遍歷所有的開關,KEY_COUNT的值在Key.H中定義了{Keybuf[i] = (Keybuf[i] << 1) | Key_GetState(i) ;//當前的開關狀態賦值給狀態監控數組PrevState[i] = CurrState[i];//當Key_GetState(i)獲得新狀態時代表著CurrState里面的狀態就是前態了CurrState[i] =Key_Get_SteadyState(i) ;//把穩定的開關狀態賦值給現態if (Time[i] > 0){Time[i] --; //對應開關的時間減1}}for (i = 0; i < KEY_COUNT; i ++)//歷遍所有的開關狀態{if (CurrState[i] == KEY_PRESSED)//如果檢測到開關按下則標志位HOLD置1{Key_Flag[i] |= KEY_HOLD; //KEY_HOLD = 0000 0001則bit 0 置1其它位保持。}else//如果沒檢測到開關按下則標志位HOLD置0{Key_Flag[i] &= ~KEY_HOLD;//,~KEY_HOLD = 1111 1110 則bit 0置0其它位保持。}if (CurrState[i] == KEY_PRESSED && PrevState[i] != KEY_PRESSED)//如果現態是按下前態是沒有按下{Key_Flag[i] |= KEY_DOWN; // KEY_DOWN = 0000 0010 則bit 1置1其它位保持}if (CurrState[i] == KEY_UNPRESSED && PrevState[i] != KEY_UNPRESSED)//如果現態是彈起前態是按下{Key_Flag[i] |= KEY_UP; // KEY_UP = 0000 0100則bit 2 置1其它位保持}if(PrevState[i] != CurrState[i] && CurrState[i]!= KEY_Unsteadystate )//進入這個函數說明開關有動作從1個穩態到另一個穩態{if(S[i] == 2 )//判斷函數是狀態2,說明函數從長按和重復按鍵狀態退出{S[i] = 0;//開關從2態恢復到0態,Time[i] = 0; //計數時間復位}else if (S[i] == 0) //如果對應開關處于空閑狀態{if (CurrState[i] == KEY_PRESSED) //如果現態的開關狀態時按下{Time[i] = KEY_TIME_LONG; //對應開關的時間設置為2000即長按檢測S[i] = 1;//開關由0態進入1態}}else if(S[i] == 1)//判斷函數是狀態1說明開關進入了短鍵模式,至于是單擊還是雙擊看后續判斷{ if(Time[i] > 0)//即開關閾值時間沒到達長按設置的時間狀態就發生了變化{S[i] = 3; //進入3態,即進入短鍵判斷模式Time[i] = KEY_TIME_DOUBLE; //設置單擊還是雙擊的閾值時間 } }else if(S[i] == 3){if(Time[i] > 0) //在狀態3的情況下又進入了函數并且還沒到達閾值時間說明發生了雙擊{Key_Flag[i] |= KEY_DOUBLE; //雙擊S[i] = 0;//回到狀態0 }else{ } } }else //進入這里說明開關穩態沒有發生變化{if(S[i] == 1 && Time[i] == 0)//到達長按閾值時間{Key_Flag[i] |= KEY_LONG; //長按Time[i] = KEY_TIME_REPEAT;S[i] = 2;//開關進入狀態2}else if(S[i]== 2)//進入重復按著的情況{if(Time[i] == 0)//100ms的重復又到了0{Key_Flag[i] |= KEY_REPEAT; //設置重復按鍵標志Time[i] = KEY_TIME_REPEAT;//設置重復按鍵時間}}else if(S[i]==3 &&Time[i] == 0 )//在3態的情況下閾值時間到達了0,說明沒有雙擊{Key_Flag[i] |= KEY_SINGLE; //設置單擊按鍵標志S[i] = 0; //開關動作結束,回到狀態0}}}}
?然后是程序的流程圖

經過簡單的測試,江科大原先留下的測試程序都能正常工作。
整個程序開關其實進行了3次穩態變化判斷:1)按鍵彈起------>按鍵按下---------->按鍵再彈起------->按鍵再按下
開關狀態key_single Key_double Key_long Key_repeat Key_Up Key_Down這些開關狀態都需要及時在主函數中使用Key_Check函數清零,否則狀態位會一直保持。但是是Key_HOLD 這個標志位的狀態會隨著開關動作一直變化。
協議)、封裝和分用)
通信方式、串口通信)



 通信機制簡介)










:CORS)
:spring-boot-autoconfigure.jar的模塊化設計)

