本文面向:移動開發工程師、AR技術研究者、室內外導航系統產品經理,旨在提供核心問題的參考方案:如何實現室內外無縫切換的精準定位(GPS+藍牙Beacon)虛擬導航路徑與實景畫面的實時疊加原理。
如需獲取ar導航導航技術解決方案可前往文章最下方獲取,如有項目合作及技術交流歡迎私信作者。
一、系統架構
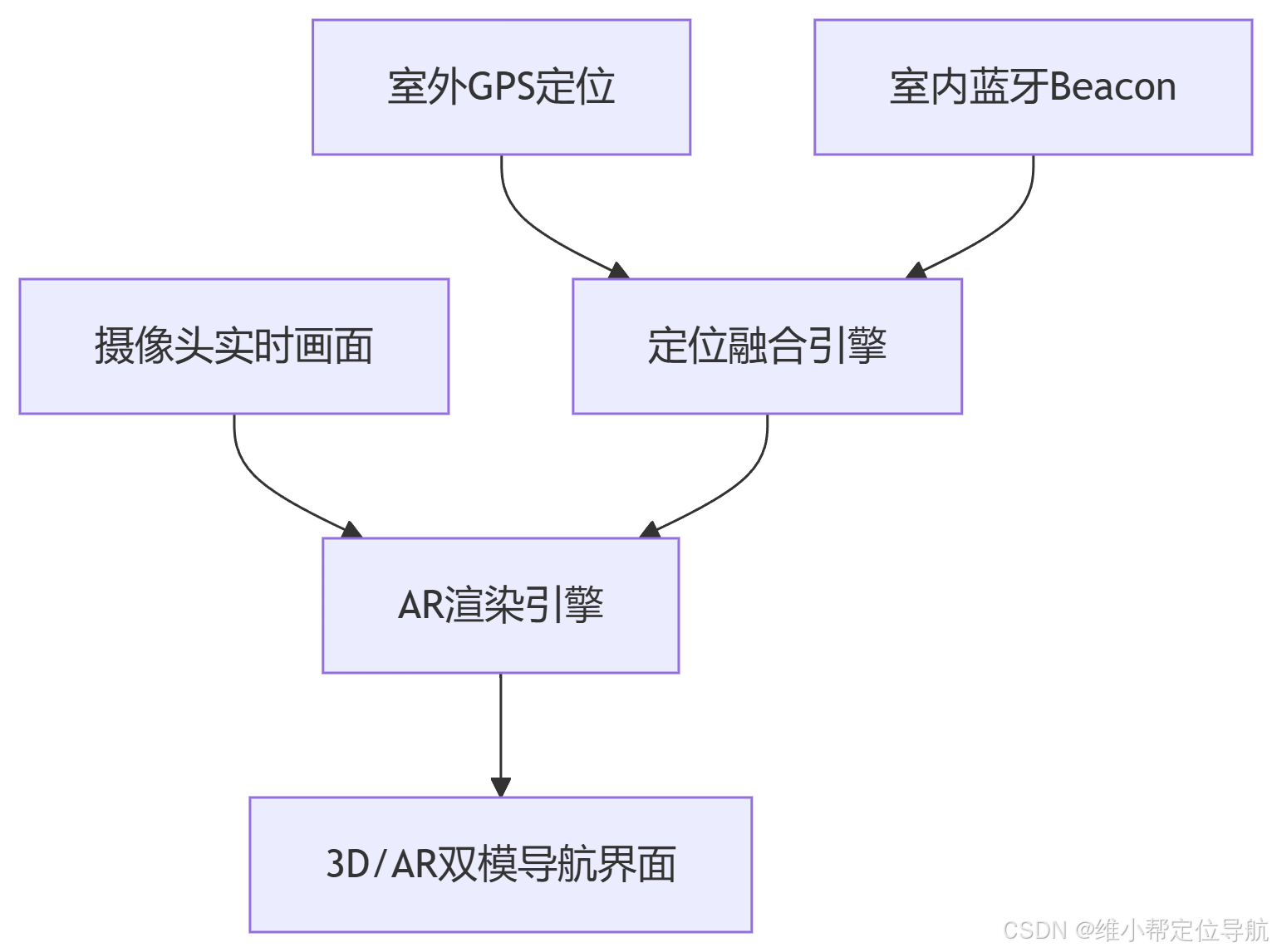
AR導航系統架構
二、關鍵技術實現原理
1. 室內外融合定位技術
# 代碼:藍牙指紋定位算法
def bluetooth_positioning(beacons):fingerprint_db = load_fingerprint_database() # 預存位置指紋庫current_rssi = {beacon.mac: beacon.rssi for beacon in beacons}# 采用KNN算法匹配最近鄰位置positions = []for pos, rssi_map in fingerprint_db.items():distance = 0for mac, rssi in current_rssi.items():if mac in rssi_map:distance += (rssi - rssi_map[mac])**2positions.append((pos, distance**0.5))# 返回誤差最小的位置return min(positions, key=lambda x: x[1])[0]平滑切換技術棧:
| 模式 | 定位方式 | 渲染技術 |
|---|---|---|
| 室外 | GPS+IMU融合 | 3D矢量地圖 |
| 過渡區 | 藍牙信號強度 | 動態模糊切換 |
| 室內 | Beacon指紋定位 | AR實景疊加 |
2. AR路徑實時疊加原理

其中:
-
$T_{world}^{camera}$:世界坐標系到相機坐標系的變換矩陣(通過融合定位獲取)
-
$P_{route}$:路徑規劃生成的3D導航點坐標
三、工程實踐:Unity中的AR導航實現
// 基于WebGL引擎的AR路徑渲染
public class ARNavigationRenderer : MonoBehaviour
{public Camera arCamera;public LineRenderer virtualPath;void UpdateARPath(Vector3[] worldPoints) {virtualPath.positionCount = worldPoints.Length;for (int i = 0; i < worldPoints.Length; i++) {// 關鍵坐標轉換:世界坐標→相機視口坐標Vector3 viewportPos = arCamera.WorldToViewportPoint(worldPoints[i]);// 深度校正(解決路徑遮擋問題)if(viewportPos.z > 0) {virtualPath.SetPosition(i, arCamera.ViewportToWorldPoint(new Vector3(viewportPos.x, viewportPos.y, 1))); // 1米深度}}}▎實際案例
-
上海某購物中心引入AR 導航后,品牌店鋪平均訪問量提升 35%,消費轉化率增長22%

四、經驗總結與行業建議
1. 開發者的實踐經驗
- 定位算法需動態調優:不同場景(如地下停車場與商場)的信號特性差異大,需針對環境特性調整權重參數。
- 用戶交互設計優先:AR 導航需避免信息過載,建議采用“漸進式引導”。(如先顯示方向箭頭,再疊加路徑細節)。
2. 行業落地建議
- 標準化藍牙信標部署:制定統一的信標布局規范(如每20米部署1個Beacon),降低后期維護成本。
- 開放API生態:提供標準化接口,支持與企業現有管理系統,如CRM、ERP等自有系統集成,提升技術復用性。
AR 導航導覽技術的核心,在于用技術消解“虛擬信息與真實空間”的認知鴻溝。未來,隨著5G與物聯網技術的成熟,這類“所見即所得”的導航模式,或將成為智慧場景的標配基礎設施。
如需AR 導航導覽技術解決方案可前往↓





)



)
轉為markdown的方法,把.adoc文件轉換為markdown格式)

)
![[智能客服project] AI提示詞配置 | 主協調器 | 閑魚協議工具](http://pic.xiahunao.cn/[智能客服project] AI提示詞配置 | 主協調器 | 閑魚協議工具)





![2025年滲透測試面試題總結-字節跳動[實習]安全研發員(題目+回答)](http://pic.xiahunao.cn/2025年滲透測試面試題總結-字節跳動[實習]安全研發員(題目+回答))