參考鏈接:Spectacular AI
硬件設備
gemini2
測試了gemini335沒成功
修改record.cpp
倉庫鏈接:sdk
讀取Timu_cam
ros2 run tf2_ros tf2_echo imu坐標系(加速度計和陀螺儀都可以,兩者變換為單位陣)camera_rgb_optical_frame
// Create Spectacular AI orbbec plugin configuration (depends on device type).
ob::Pipeline obPipeline;
spectacularAI::orbbecPlugin::Configuration config(obPipeline);
// 外參賦值
config.imuToCameraRgb = {{{ 1, 0, 0, 0 },{ 0, 1, 0, 0 },{ 0, 0, 1, 0 },{ 0, 0, 0, 1 }
}};
編譯代碼
注意sdk與OrbbecSDK的版本對應
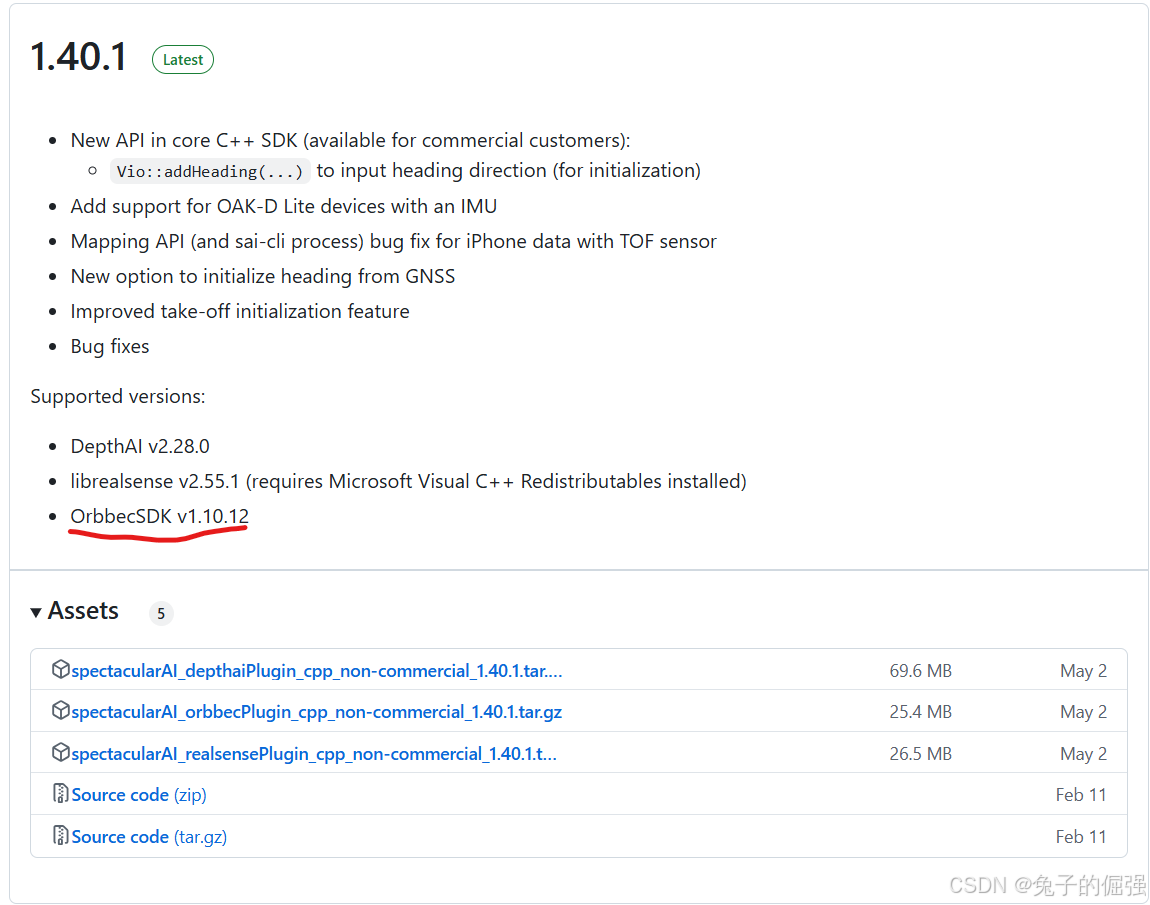
(1)下載OrbbecSDK v1.10.12
cd OrbbecSDK && mkdir build && cd build && cmake .. && cmake --build . --config Release
make install
(2)下載spectacularAI_orbbecPlugin_cpp_non-commercial_1.40.1.tar.gz 與source code
(3)編譯sdk orbbec目錄下的record.cpp
mkdir target
cd target
cmake -DspectacularAI_orbbecPlugin_DIR=<path/to/spectacularAI_orbbecPlugin/lib/cmake/spectacularAI/> -DOrbbecSDK_DIR=<path/to/OrbbecSDK> ..
make
測試效果
同官網效果
ide debug記錄
clion
debug的時候,執行./sai-record-orbbec報錯:
找不到pip install “spectacularAI[full]”
echo $PATH
然后寫到環境變量里面
vscode debug python
f5 寫入python腳本參數
離線運行
./sai-record-orbbec --recording_only --no_preview # More lightweight
sai-cli process.py XXX
3DGS建圖
dn-splatter




)

)






)





