目錄
一、研究背景?
二. 核心創新點?
?2.1 避免高MAC操作?
?2.2 DSDM-LFIM主干網絡?
2.3 P2小目標檢測分支?
?3. 代碼復現指南?
環境配置
關鍵修改點
?4. 實驗結果對比?
4.1 VisDrone數據集性能
4.2 邊緣設備部署
4.3 檢測效果可視化
?5. 應用場景?
?6. 總結?
一、研究背景?
針對無人機(UAV)圖像中小目標檢測的實時性與邊緣部署難題,本文提出SOD-YOLO模型。通過創新設計DSDM-LFIM主干網絡和P2小目標檢測頭,在VisDrone數據集上實現50.7% AP50,推理速度72.5 FPS,參數量降低17.89%,計算量減少20.25%,顯著優于YOLOv7!
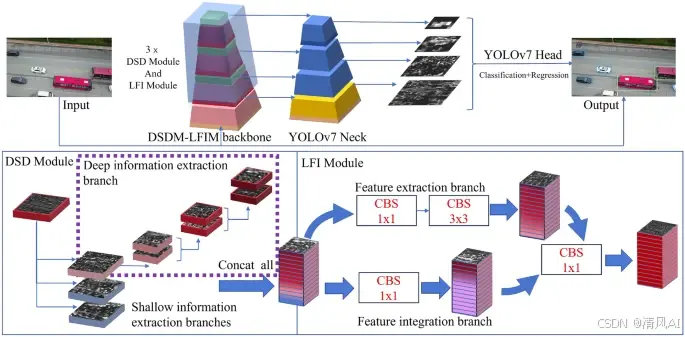
SOD-YOLO 模型結構圖




)
)








Day32)

和Windbg工具排查軟件高CPU占用問題)
)

