大家好!在如今人類對水下環境探索不斷深入的時代,從水下考古到珊瑚礁考察,各種任務都離不開水下機器人的助力。但傳統水下機器人尺寸較大,在狹窄的水下空間施展不開。今天,我們就來認識一款受海洋小生物啟發而設計的仿生多運動模態水下微型機器人 ——RoboPteropod,看看它是如何在復雜水下環境中靈活穿梭的。
*本文只做閱讀筆記分享*
一、設計靈感與背景
在浩瀚的海洋里,有一種小小的生物 —— 翼足類動物(pteropod),它就像一位靈動的舞者,能在水中自由地改變運動方向。它的秘訣就在于可以通過調整翅膀的攻角來實現各種動作。
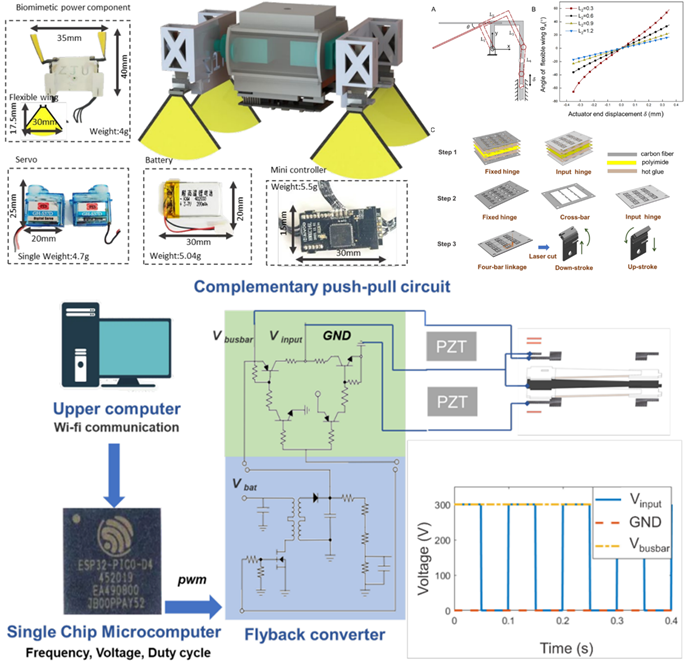
科學家們受到這種生物的啟發,設計出了 RoboPteropod。它體型小巧,長 7.5 厘米、寬 4 厘米、高 4.5 厘米,重 34 克 ,卻有著強大的運動能力,能在復雜的水下環境中大展身手,這為水下探索帶來了新的可能。
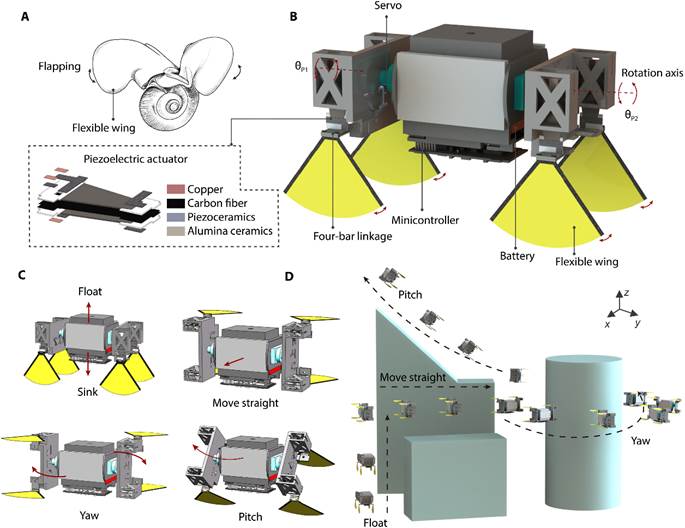
二、RoboPteropod 的設計
RoboPteropod 主要由仿生動力組件和控制單元構成,各個組件通過 3D 打印的主框架組裝連接。仿生動力組件是它的核心,每個組件都有兩個由壓電驅動器驅動的柔性翅膀。就像翼足類動物的翅膀一樣,這些柔性翅膀在壓電驅動器的帶動下,能實現高效的拍打運動。控制單元則像是機器人的大腦,由微型控制器、電池和伺服電機組成。它能接收外部計算機的控制信號,通過調整驅動信號的電壓和頻率,精準控制仿生動力組件的運動,進而實現機器人在水中多種運動模式的快速切換。
三、仿生動力組件的特性
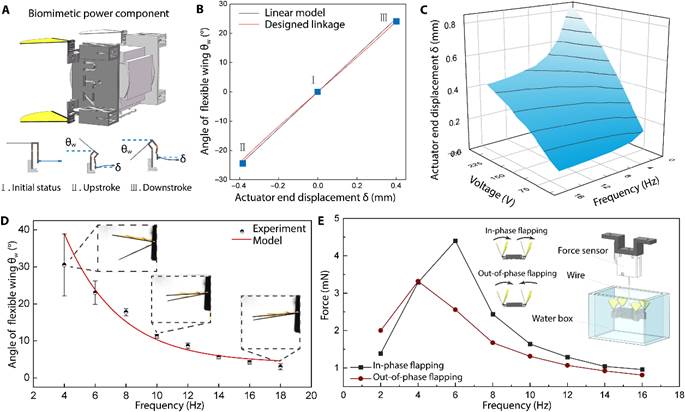
為了讓 RoboPteropod 在運動過程中更易控制,科研人員對其仿生動力組件進行了優化設計和測試。壓電驅動器通過四桿連桿帶動柔性翅膀運動,經過優化設計的四桿連桿系統,能讓翅膀的上下拍動完全對稱,平衡側向分離力,保障運動的穩定性。
在不同的電壓和頻率下,壓電陶瓷的端點位移會發生變化,電壓越高,端點位移越大;頻率越高,端點位移越小。此外,研究人員還發現,通過調整翅膀的同相和反相拍打模式,可以有效解決機器人在低頻運動時的俯仰問題,提高運動穩定性。
四、RoboPteropod 的多模態運動
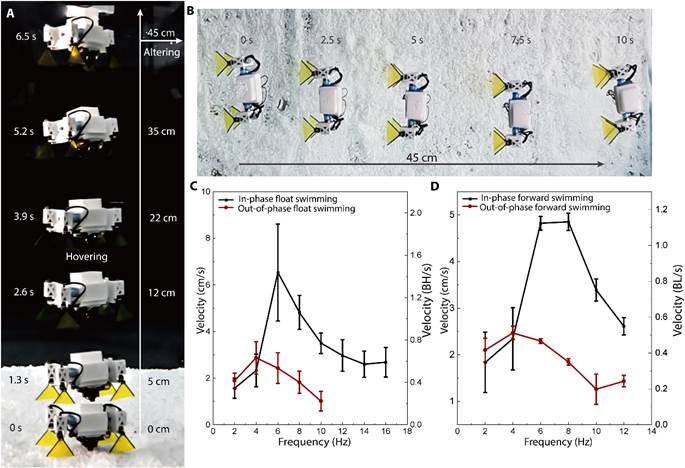
直線運動特性:在直線運動方面,通過調整機器人上浮力腔中液體的體積,能讓機器人達到靜態穩定狀態。研究發現,在低頻時,反相拍打模式能讓機器人的俯仰運動近似正弦變化,且振幅隨頻率減小,此時反相拍打能消除機器人受力的水平分量,運動更穩定;高頻時,同相拍打模式下翅膀同步拍打,力的峰值更高,運動速度更快。實驗數據顯示,在 6Hz 頻率下,機器人上升速度可達 6.5cm/s,前進速度可達 4.8cm/s。
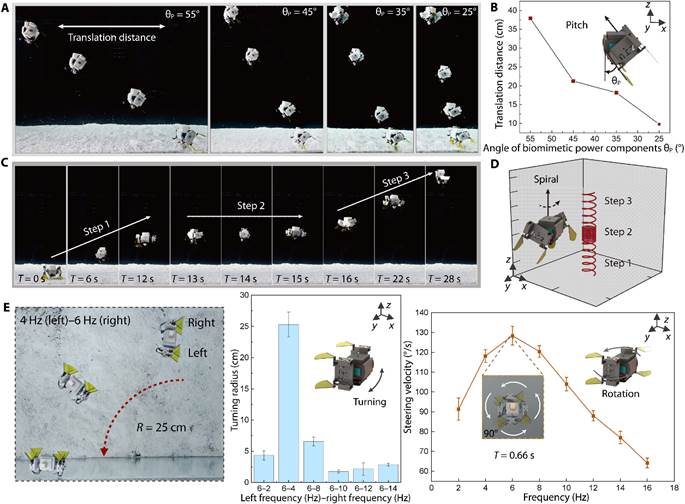
俯仰、螺旋和偏航性能:當機器人遇到障礙物需要斜向上攀爬時,俯仰運動就派上用場了。通過讓仿生動力組件兩側以相同角度旋轉,機器人就能實現俯仰運動,而且隨著旋轉角度增大,平移距離也會增加。在狹窄空間探索時,螺旋模式能幫助機器人快速偵察環境。讓仿生動力組件兩側以相反角度旋轉,機器人就會一邊自轉一邊垂直上升。在偏航性能上,通過改變仿生驅動單元兩側的驅動頻率,能調節機器人的轉向半徑,甚至實現零半徑轉向,這在狹窄空間中極為靈活。
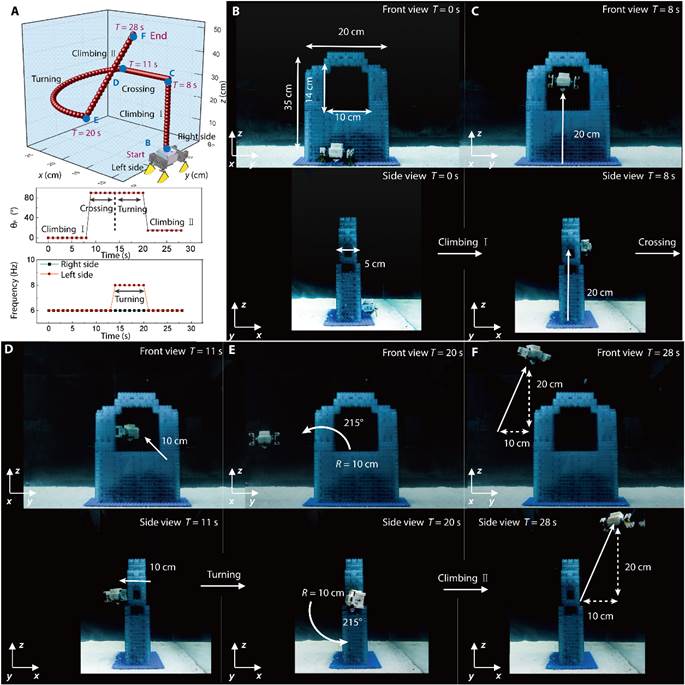
3D 水下運動軌跡:為了展示 RoboPteropod 在復雜環境中的運動能力,研究人員設計了一條復雜的 3D 軌跡,包括垂直攀爬、橫向穿越、繞過障礙物和斜向上攀爬等動作。在實驗中,機器人要穿越模擬的狹窄水下洞穴。它能按照預設的指令,在不同的運動模式之間快速切換,順利完成整個軌跡,而且多次實驗的軌跡平均誤差僅為 46.18mm,這表明它的運動精度很高,能很好地適應復雜水下環境。
五、總結與展望
RoboPteropod 憑借其獨特的設計,實現了高效的水下多模態運動。它的出現為微小型水下撲翼機器人的多自由度運動提供了新的解決方案,在狹窄水下空間的探索中展現出巨大潛力。未來,研究人員還計劃通過增強機載傳感實現閉環控制,并開發新的耐壓底盤,讓它能在深海和高壓管道等更具挑戰性的環境中執行任務。
六、一起來做做題吧
1、開發適用于狹窄水生環境的微型水下機器人面臨的關鍵挑戰不包括以下哪一項?( )
A. 執行敏捷 maneuvers 的能力
B. 小型化尺寸限制
C. 靈活的運動模式轉換能力
D. 與傳統水下機器人的兼容性
2、RoboPteropod 的仿生動力組件中,帶動柔性翅膀運動的是( )。
A. 微型控制器
B. 壓電驅動器
C. 伺服電機
D. 四桿連桿
3、在壓電驅動器驅動柔性翅膀的過程中,隨著驅動頻率增加,壓電陶瓷端點位移會( )。
A. 增大
B. 減小
C. 先增大后減小
D. 先減小后增大
4、在 RoboPteropod 的直線運動中,低頻時哪種拍打模式更具優勢?( )
A. 同相拍打
B. 反相拍打
C. 兩者一樣
D. 文中未提及
5、RoboPteropod 在執行 3D 水下運動軌跡實驗時,穿越模擬狹窄水下洞穴過程中,以下哪種操作未涉及?( )
A. 改變仿生動力組件的角度
B. 調整驅動信號的頻率
C. 釋放機械手臂輔助
D. 接收模式切換命令
參考文獻:
Taishan Liu et al. A bioinspired multimotion modality underwater microrobot. Sci. Adv.11, eadu2527(2025).


 ? |搭建項目框架)




)










)
