目錄
STM32F103的GPIO口
????????GPIO口的作用
????????GPIO口的工作模式
????????input輸入檢測 -- 向內檢測
????????output控制輸出 -- 向外輸出
寄存器
????????寄存器地址的確定
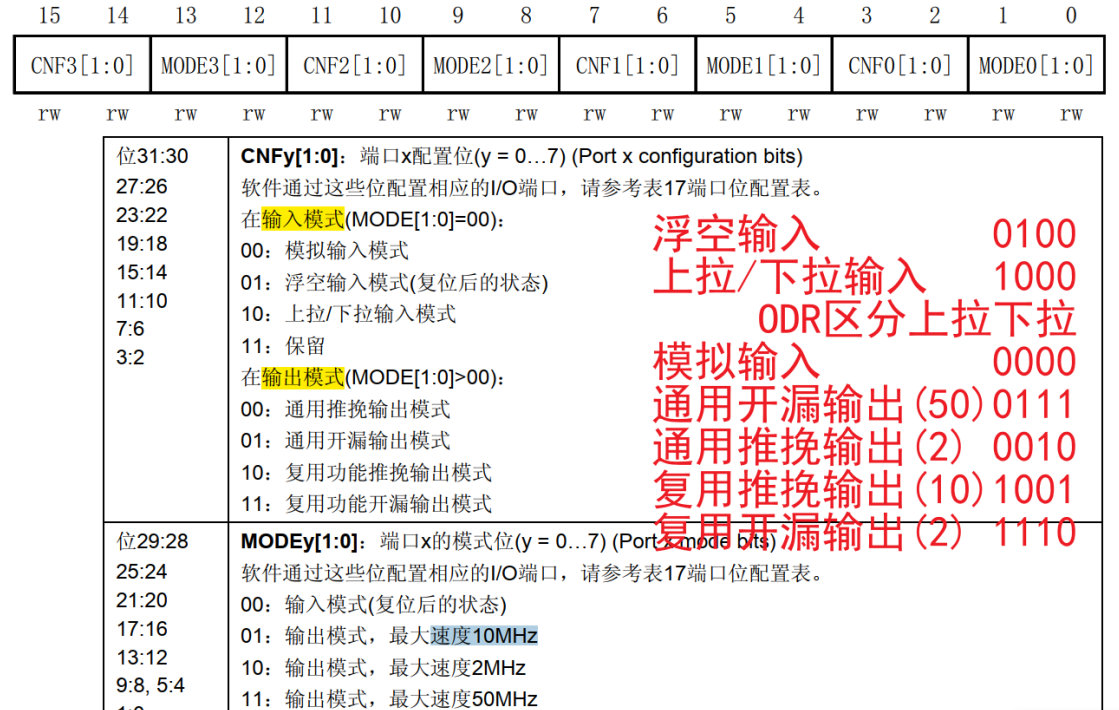
????????配置GPIO口的工作模式
????????時鐘的開啟和關閉
軟件編程驅動 LED 燈
??????? 硬件
????????軟件
軟件編程驅動 KEY 按鍵?
????????硬件
????????軟件
?? ????????按鍵消抖
代碼
STM32F103的GPIO口
根據 STM32F103ZET6 的命名規范,總共 144 個引腳
????????PA0--PA15?
????????PB0--PB15?
????????PC0--PC15?
????????PD0--PD15?
????????PE0--PE15?
????????PF0--PF15?
????????PG0--PG15 16*7=112?
????????以上稱為 GPIO(通用的輸入輸出接口)?
????????11 個 VDD -- 數字電源的正
????????11 個 VSS -- 數字電源的負? 134?
????????1 個 VDDA -- 模擬電源的正
????????1 個 VSSA -- 模擬電源的負?
????????1 個 VREF+ -- 參考電壓的正
????????1 個 VREF-?參考電壓的負?
????????1 個 NRST -- 復位引腳?139
????????2 個 OSC_IN OSC_OUT 141 --高速晶振?
????????1 個 VBAT 142 -- 接電池?
????????1 個 NC -- 未使用?
????????1 個 BOOT0 -- 下載引腳?
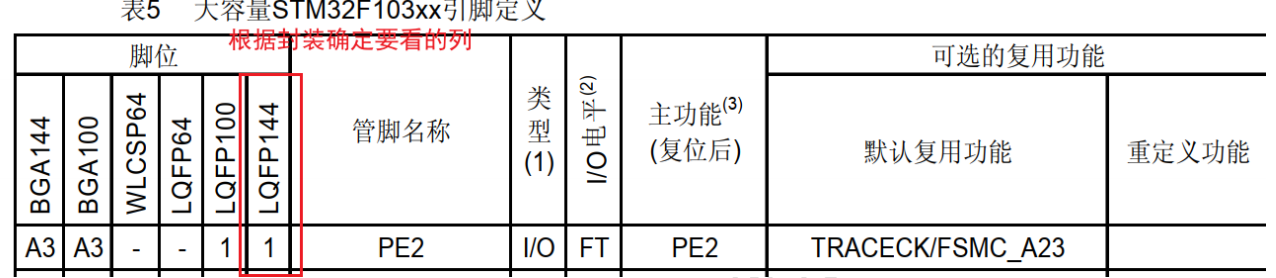
????????PE2 P 指端口(Port),E 指 E 端口,1 個端口一般有 16 個 GPIO 口 0--15?
????????PE2 指 E 端口的第二個引腳?
????????PG11 指 G 端口的第十一引腳?
????????PA0 指 A 端口的第零引腳?
上面信息從:數據手冊中文:圖 5,芯片的外觀中獲取
????????GPIO口的作用
????????????????芯片內部和外部通信的媒介。?
????????????????如何確定配置輸入還是輸出??
????????????????? 向內輸入檢測:檢測開關是否按下,檢測屏幕是否按下。?
????????????????? 向外輸出控制:控制 LED,蜂鳴器,控制繼電器,控制顯示屏?
????????????????? 后期程序配置中,是否需要配置 GPIO,取決于單片機是否需要借助 GPIO 口和外界連接
????????GPIO口的工作模式
????????????????總共八種?
????????????????四種輸入?
????????????????????????模擬輸入?
????????????????????????上拉輸入?
????????????????????????下拉輸入?
????????????????????????浮空輸入?
????????????????四種輸出?
????????????????????????通用推挽輸出?
????????????????????????通用開漏輸出?
????????????????????????復用推挽輸出?
????????????????????????復用開漏輸出
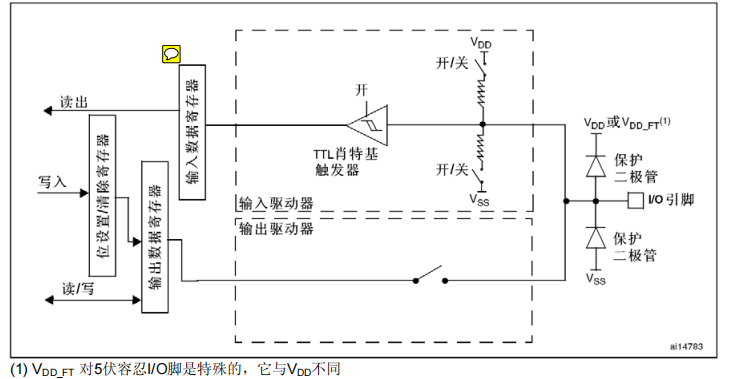
????????input輸入檢測 -- 向內檢測
????????????????極端(數字)輸入:3.3V 或者 0V,正好對應數字量的邏輯 1 和邏輯 0?
????????????????模擬輸入: 0v~3.3V 之間的中間值,一般結合 ADC 使用
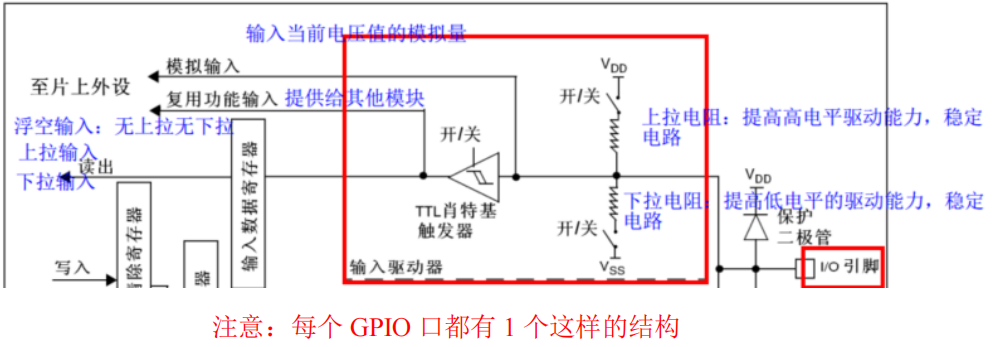
????????????????TTL 肖特基觸發器:把高低電平電壓值轉換為邏輯值(0 和 1);?
????????????????如何確定選擇哪種輸入模式:?
????????????????????????? 外部電路的電壓是 0—3.3 的任意電壓,選擇模擬輸入?
????????????????????????? 外部電路有靠譜高和低兩種狀態,選擇浮空輸入?
????????????????????????? 外部電路只有靠譜的高,選擇下拉輸入?
????????????????????????? 外部電路只有靠譜的低,選擇上拉輸入
????????output控制輸出 -- 向外輸出
????????????????輸出模擬量:0--3.3V 之間的電壓,DAC 功能使用
????????????????輸出數字量:只有邏輯 0(對應 0V),邏輯 1(對應 3.3V)
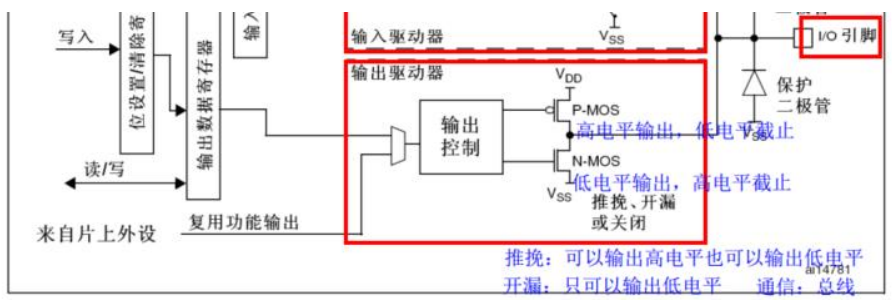
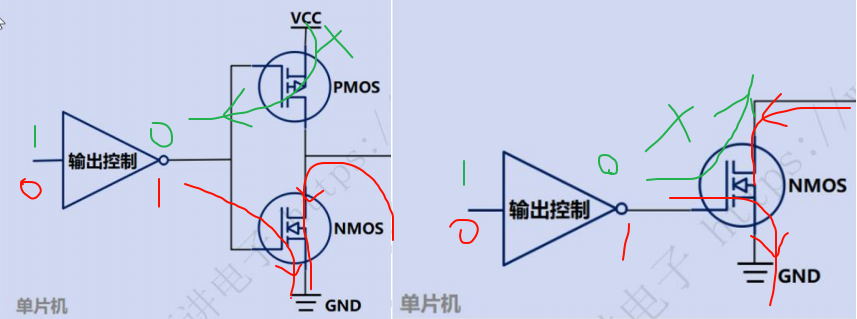
????????????????推挽輸出:既可以輸出高電平,也可以輸出低電平,PMOS 和 NMOS 都可以導通,直接把邏輯值輸出成高低電平 。
????????????????開漏輸出:只能輸出低電平,輸出為 1 時是高阻態(未知狀態,電路上電壓由電路來決定);經常應用在總線,需要增加上拉電阻配合使用;具有讀取(線與)的功能。
????????????????DHT11 的采集電路 -- 用開漏模式?
????????????????復用:來至于片上外設,USART,硬件 SPI,硬件 IIC,定時器 PWM?
????????????????通用:普通的 GPIO 口,控制 LED、蜂鳴器、繼電器?
????????????????如何確定輸出選擇哪種模式:?
????????????????????????? 既需要輸出高電平,也需要輸出低電平,選擇推挽模式?
????????????????????????? 只需要輸出低電平,選擇開漏模式?
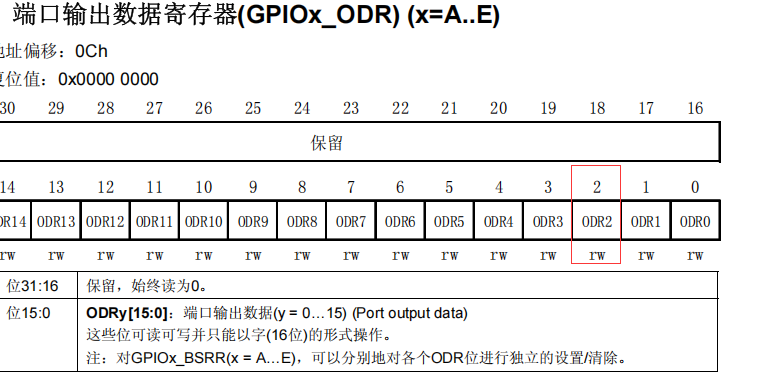
????????????????????????? 普通 GPIO 口的輸出,例如控制 LED,蜂鳴器,繼電器等通過操作 ODR 寄存器實現的,配置通用輸出?
????????????????????????? 外設控制的輸出,例如 USART,硬件 SPI,硬件 IIC,定時器 PWM,選擇復用功能
寄存器
寄存器存放的是:工作模式,輸入或者輸出的電平狀態。
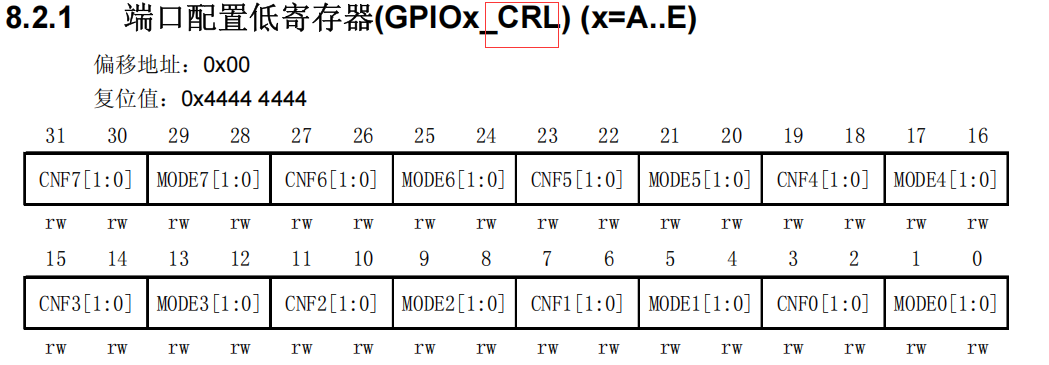
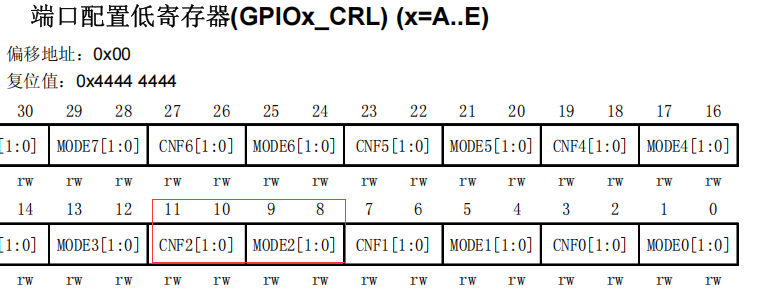
(GPIOx_CRL) (x=A..G) :每個端口都有 1 個這樣的寄存器(STM32F103ZET6 有 7 個端口)
偏移地址:相對于這個外設基地址的偏移
復位值:單片機復位之后,寄存器中存放的值
????????寄存器地址的確定
????????????????GPIOA_CRL 寄存器地址?
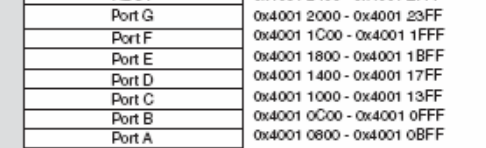
????????????????1. 確定屬于哪個端口,找到該端口的外設基地址 -- 從數據手冊 存儲器映像找
![]()
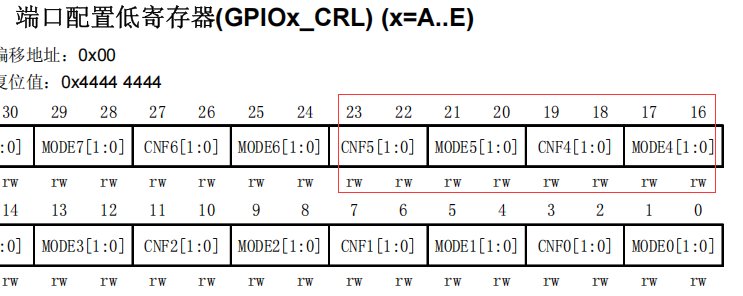
????????????????2. 找到 CRL 寄存器相對于外設基地址的偏移值 -- 從參考手冊對應寄存器介紹?
偏移地址:0x00

????????????????3. 計算該寄存器的地址?
????????????????寄存器的地址=外設基地址+偏移地址=0x40010800+0x00=0x40010800
????????配置GPIO口的工作模式
????????????????(1) 確認端口?
????????????????(2) 確認哪個 GPIO 口,0--7 在 CRL 寄存器中,8--15 在 CRH 寄存器中?
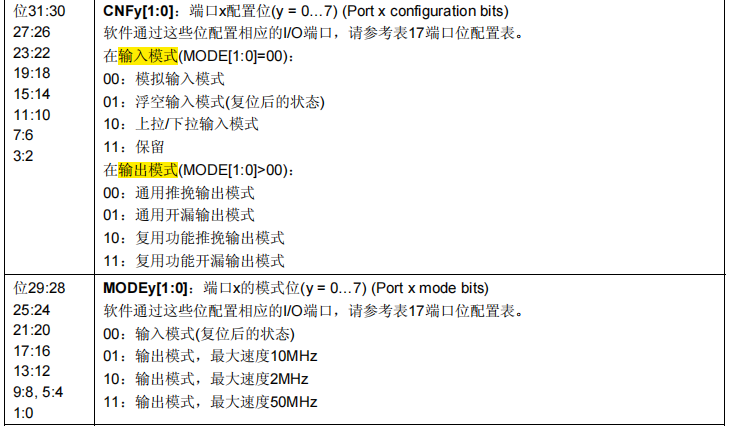
????????????????(3) 先配置 MODE 的兩位,確定好輸入和輸出模式?
????????????????(4) 在配置 CNF 位,確定具體的模式
????????時鐘的開啟和關閉
????????????????各個功能模塊有獨立的時鐘開關,設備廠商考慮到功耗的問題,如果不使用該模塊,時鐘默認是關閉的。開啟時鐘之后,對應模塊才可以正常工作
????????????????使用功能模塊 一定要開啟時鐘
????????????????RCC_APB2ENR 寄存器地址?
????????????????????????(1) 找 RCC 的外設基地址?
![]()
????????????????????????(2) 找到寄存器相對于外設基地址的偏移

????????????????????????(3) 計算寄存器地址?
????????????????????????????????RCC_APB2ENR=0x40021000+0x18=0x40021018
軟件編程驅動 LED 燈
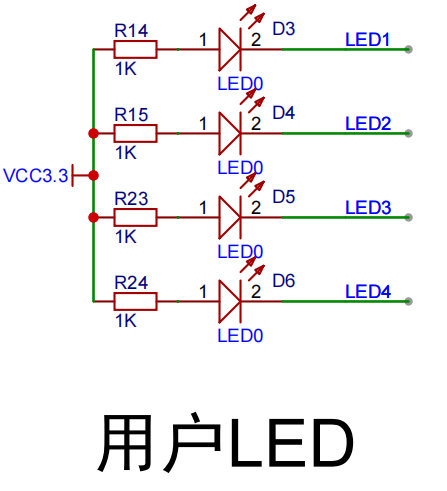
??????? 硬件

????????軟件
????????????????1.看硬件圖,LED分別接在PE2-PE5
????????????????2.開啟PE端口時鐘
![]()
????????????????3.設置工作模式,以PE2為例
????????結合硬件電路, 首先選擇通用還是復用,復用功能需要結合外設(UART_TX 等)使用,我們選擇通用輸出,開漏和推挽選擇,推挽一定可以,為了有穩定的狀態,所以選擇推挽,所以最終選擇通用推挽輸出。
????????????????4.分別控制輸出高低電平。假如以 PE2 為例,操作 GPIOE_ODR 的位 2,分別設置為 0 和 1
軟件編程驅動 KEY 按鍵?
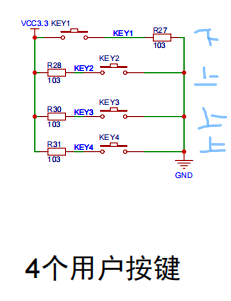
????????硬件
????????軟件
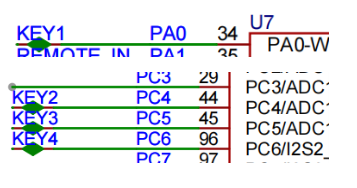
????????????????1.結合硬件原理圖,確定 KEY 分別接在 PA0 PC4 PC5 PC6?
????????????????2.開啟對應的端口時鐘,開啟 C 端口和 A 端口時鐘
![]()
????????????????????????RCC_APB2ENR 的位 2 置 1,開啟端口 A 的時鐘?
????????????????????????RCC_APB2ENR 的位 4 置 1,開啟端口 C 的時鐘?
????????????????3.設置工作模式,假如以 PC4 PC5 為例,操作 GPIOE_CRL 寄存器的位 23:16 結合硬件電路, 按鍵按下和未按下有穩定的高電平和低電平,所以選擇浮空輸入 GPIOC_CRL 寄存器的位 23:16 寫入 0100 0100?
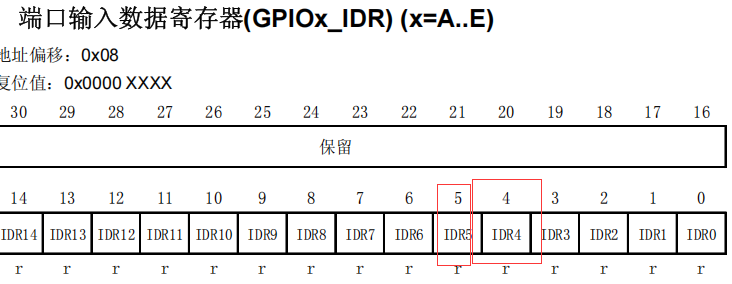
????????????????4.分別檢測(讀取)PC4,PC5 的引腳電平,來確定按鍵是否按下GPIOC_IDR 的位 4 或者位 5 判斷按鍵是否按下
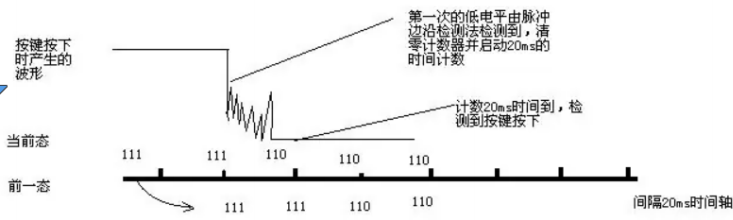
?? ????????按鍵消抖
代碼
led.c
#include "led.h"
#include "main.h"
void LED_Config(void)
{
#if (USB_STD_LIB==0)//1.開啟GPIOE的時鐘 結合硬件:LED4接在PE5上 6.3.7RCC_APB2ENR/*RCC的外設地址 0x40021000RCC_APB2ENR寄存器相對于基地址偏移0x18RCC_APB2ENR寄存器地址:0x40021000+0x18 + 0x18= 0x40021018*///*(uint32_t *)(0x40021018) = (*(uint32_t *)(0x40021018)) | (0x01<<6);//RCC->APB2ENR = RCC->APB2ENR | (0x01<<6);RCC->APB2ENR |= (0x01<<6);//2.設置gpio模式,設置通用推挽輸出//LED4初始化GPIOE->CRL &= ~(0xFFFF << 8);//先清0GPIOE->CRL |= (0x1111 << 8);//在置1/* GPIOE->CRL &= ~(0xF << 20);//先清0GPIOE->CRL |= (0x01 << 20);//在置1//LED3初始化GPIOE->CRL &= ~(0xF << 16);//先清0GPIOE->CRL |= (0x01 << 16);//在置1//LED2初始化GPIOE->CRL &= ~(0xF << 12);//先清0GPIOE->CRL |= (0x01 << 12);//在置1//LED1初始化GPIOE->CRL &= ~(0xF << 8);//先清0GPIOE->CRL |= (0x01 << 8);//在置1 */
#elif (USB_STD_LIB==1)//1.開E端口時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);//2.定義結構體 xxx需要傳遞結構體地址GPIO_InitTypeDef GPIO_InitStruct = {0};//3.給結構體賦值GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 |GPIO_Pin_5;//代配置引腳GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//工作模式GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz;//引腳速率//4.調用xxx_Init函數,將參數寫入寄存器中GPIO_Init(GPIOE, &GPIO_InitStruct);
#endif
}void LED1_ON(void)//開燈,低電平亮
{
#if (USB_STD_LIB==0)GPIOE->ODR &= ~(0x01 << 2);
#elif (USB_STD_LIB==1)GPIO_ResetBits(GPIOE, GPIO_Pin_2);
#endif
}
void LED1_OFF(void)//關燈,高電平滅
{
#if (USB_STD_LIB==0)GPIOE->ODR |= (0x01 << 2);
#elif (USB_STD_LIB==1)GPIO_SetBits(GPIOE, GPIO_Pin_2);
#endif
}
void LED1_TOGGLE(void)//翻轉 ^相同為0不同為1
{
#if (USB_STD_LIB==0)GPIOE->ODR ^= (0x01 << 2);
#elif (USB_STD_LIB==1)GPIO_WriteBit(GPIOE, GPIO_Pin_2, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOE, GPIO_Pin_2)));
#endif
}
void LED4_ON(void)//開燈,低電平亮
{
#if (USB_STD_LIB==0)GPIOE->ODR &= ~(0x01 << 5);
#elif (USB_STD_LIB==1)GPIO_ResetBits(GPIOE, GPIO_Pin_5);
#endif
}
void LED4_OFF(void)//關燈,高電平滅
{
#if (USB_STD_LIB==0)GPIOE->ODR |= (0x01 << 5);
#elif (USB_STD_LIB==1)GPIO_SetBits(GPIOE, GPIO_Pin_5);
#endif
}
void LED3_ON(void)//開燈,低電平亮
{
#if (USB_STD_LIB==0)GPIOE->ODR &= ~(0x01 << 4);
#elif (USB_STD_LIB==1)GPIO_ResetBits(GPIOE, GPIO_Pin_4);
#endif
}
void LED3_OFF(void)//關燈,高電平滅
{
#if (USB_STD_LIB==0)GPIOE->ODR |= (0x01 << 4);
#elif (USB_STD_LIB==1)GPIO_SetBits(GPIOE, GPIO_Pin_4);
#endif
}
void LED2_ON(void)//開燈,低電平亮
{
#if (USB_STD_LIB==0)GPIOE->ODR &= ~(0x01 << 3);
#elif (USB_STD_LIB==1)GPIO_ResetBits(GPIOE, GPIO_Pin_3);
#endif
}
void LED2_OFF(void)//關燈,高電平滅
{
#if (USB_STD_LIB==0)GPIOE->ODR |= (0x01 << 3);
#elif (USB_STD_LIB==1)GPIO_SetBits(GPIOE, GPIO_Pin_3);
#endif
}led.h
#ifndef __LED_H__
#define __LED_H__#include "stm32f10x.h"void LED_Config(void);
void LED4_ON(void);
void LED4_OFF(void);
void LED4_TOGGLE(void);void LED3_ON(void);
void LED3_OFF(void);
void LED3_TOGGLE(void);void LED2_ON(void);
void LED2_OFF(void);
void LED2_TOGGLE(void);void LED1_ON(void);
void LED1_OFF(void);
void LED1_TOGGLE(void);#endifkey.c
#include "key.h"
#include "delay.h"
#include "led.h"
#include "BUZZER.h"
#include "main.h"
#include "RGB.h"
#include "relay.h"
uint8_t RBG_state = 3;
void KEY_Config(void)
{
#if (USB_STD_LIB==0)//RCC->APB2ENR |= (0x01<<2);//RCC->APB2ENR |= (0x01<<4);RCC->APB2ENR |= (0x05 << 2);//KEY1GPIOA->CRL &= ~(0xF << 0);//先清0GPIOA->CRL |= (0x4 << 0);//在置1//KEY2 KEY3 KEY4GPIOC->CRL &= ~(0xFFF << 16);//先清0GPIOC->CRL |= (0x444<< 16);//在置1
#elif (USB_STD_LIB==1)//1.開A C端口時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC,ENABLE);//2.定義結構體 xxx需要傳遞結構體地址GPIO_InitTypeDef GPIO_InitStruct = {0};//3.GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;//工作模式,浮空輸入GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;//待配置的引腳//GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz; 輸入可以不配置引腳速率//4.調用xxx_Init函數,將參數寫入寄存器中GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4 |GPIO_Pin_5 |GPIO_Pin_6;//代配置引腳GPIO_Init(GPIOC, &GPIO_InitStruct);#endif
}//按鍵掃描函數
/*返回值0無按鍵按下1按鍵1按按下并松手2按鍵2按按下并松手3按鍵3按按下并松手4按鍵4按按下并松手
*/
uint8_t KEY_SCAN(void)
{
#if (USB_STD_LIB==0) uint8_t KEY_Sate;if((GPIOA->IDR & (0x01 << 0)) != 0)//判斷KEY1是否按下,按下為1高電平{Delay_ms(10);//消抖if((GPIOA->IDR & (0x01 << 0)) != 0){while((GPIOA->IDR & (0x01 << 0)) != 0)//確定松手{}KEY_Sate = 1;}}if((GPIOC->IDR & (0x01 << 4)) == 0)//判斷KEY2是否按下,按下為0低電平{Delay_ms(10);//消抖if((GPIOC->IDR & (0x01 << 4)) == 0){while((GPIOC->IDR & (0x01 << 4)) == 0){}KEY_Sate = 2;}}if((GPIOC->IDR & (0x01 << 5)) == 0)//判斷KEY3是否按下,按下為0低電平{Delay_ms(10);//消抖if((GPIOC->IDR & (0x01 << 5)) == 0){while((GPIOC->IDR & (0x01 << 5)) == 0){}KEY_Sate = 3;}}if((GPIOC->IDR & (0x01 << 6)) == 0)//判斷KEY4是否按下,按下為0低電平{Delay_ms(10);//消抖if((GPIOC->IDR & (0x01 << 6)) == 0){while((GPIOC->IDR & (0x01 << 6)) == 0){}KEY_Sate = 4;}}return KEY_Sate;
#elif (USB_STD_LIB==1)uint8_t KEY_Sate = 0;if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET){Delay_ms(10);//消抖if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET){while(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET)//確定松手{}KEY_Sate = 1;}}if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4) == Bit_RESET){Delay_ms(10);//消抖if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4) == Bit_RESET){while(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4) == Bit_RESET)//確定松手{}KEY_Sate = 2;}}if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5) == Bit_RESET){Delay_ms(10);//消抖if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5) == Bit_RESET){while(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5) == Bit_RESET)//確定松手{}KEY_Sate = 3;}}if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6) == Bit_RESET){Delay_ms(10);//消抖if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6) == Bit_RESET){while(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6) == Bit_RESET)//確定松手{}KEY_Sate = 4;}}return KEY_Sate;
#endif}void KEY_Handle(void)
{uint8_t KEY_Sate = 0;KEY_Sate = KEY_SCAN();switch(KEY_Sate){case 0: break;case 1: LED1_ON(); LED2_ON(); LED3_ON(); LED4_ON();break;case 2: LED1_OFF(); LED2_OFF(); LED3_OFF(); LED4_OFF();break;case 3: Relay_ON();break;case 4: Relay_OFF();//Update_RGB();break;}
}
key.h
#ifndef __KEY_H__
#define __KEY_H__#include "stm32f10x.h"void KEY_Config(void);
uint8_t KEY_SCAN(void);
void KEY_Handle(void);
//void Tim2_Init();
//void TIM2_IRQHandler();
//void Update_RGB();#endifmain.c
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "RGB.h"
#include "relay.h"
#include "key.h"
#include "BUZZER.h"
#include "exti.h"
#include "main.h"int main(void)
{#if (USB_STD_LIB==0) //開機調用一次配置的搶占和次級優先級必須符合該分組情況//搶占0-3,次級0-3NVIC_SetPriorityGrouping(5);#elif (USB_STD_LIB==1)NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);#endifLED_Config();LED4_OFF();LED3_OFF();LED2_OFF();LED1_OFF();RGB_Config();R_OFF();G_OFF();B_OFF();Relay_Init();Relay_OFF();KEY_Config();BUZZER_Config();EXIT_Confing();while(1){R_ON();Delay_ms(100);R_OFF();Delay_ms(100);}
}








---自定義advisor擴展+結構化json輸出)




案例:構建簡單的區塊鏈——密碼學基礎)

原理)


