奧比中光的深度相機Orbbec Femto Bolt是Microsoft的Azure Kinect DK的升級版,根據官網的文檔配置環境遇到了一些問題,記錄一下。
注意:
官網文檔鏈接:Femto Bolt文檔
1、首先連接相機到電腦USB3.0,接通電源,相機前后的兩個指示燈常亮為正確連接。去資源商店搜索Azure Kinect and Femto Bolt Examples for Unity,后續將使用這個插件。
在這個資源的概述中可以下載Azure-Kinect Sensor SDK和Azure Kinect Body Tracking SDK,但不是最新版。
Azure Kinect DK 官方頁面:https://github.com/Microsoft/Azure-Kinect-Sensor-SDK
Azure Kinect Body Tracking SDK 官網:
Azure Kinect Body Tracking SDK download | Microsoft Learn

3、默認位置安裝好后,如果是AzureKinect設備就能直接打開k4aviewer.exe連接設備進行測試了,但這是Femto Bolt,現在直接打開k4aviewer.exe識別不到設備,還需要多一點操作。
根據文檔AKDK 應用如何切換到Orbbec SDK K4A Wrapper:
將Femto Bolt接入AKDK應用軟件
4.替換文件
找到Orbbec SDK K4A Wrapper中的頭文件。將上述庫文件拷貝到Azure Kinect Sensor SDK的原有可執行應用程序路徑下,并替換原有k4a.dll、k4arecord.dll、depthengine_2_0.dll庫文件,即可運行應用程序。

實際操作:和官方文檔還有一點差別在這里,還有兩個文件要一起復制過去。
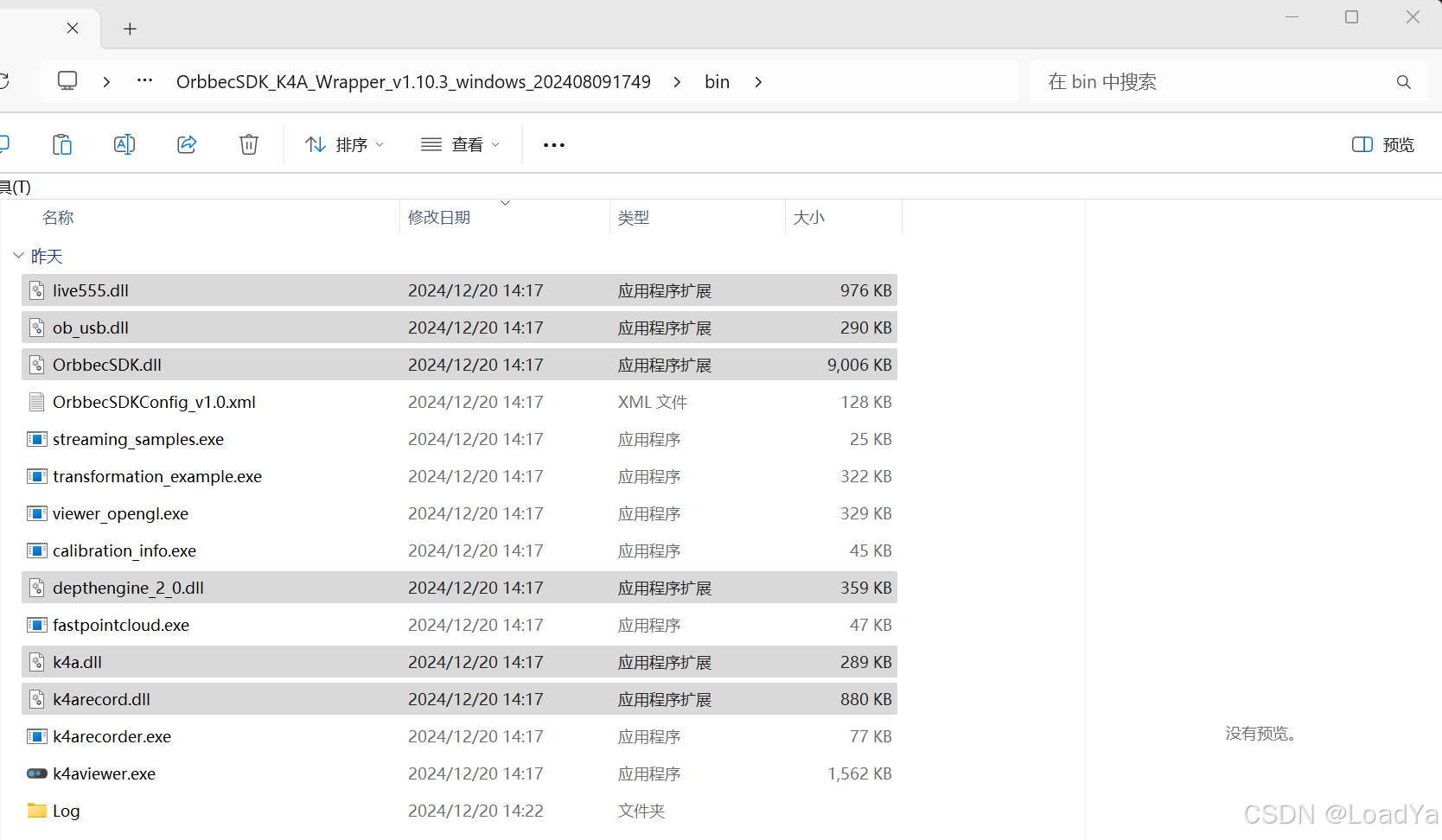
最后,導入Azure Kinect and Femto Bolt Examples for Unity插件,把上面的6個文件復制到對應的文件夾里,就可以正常運行了。
二、環境設置
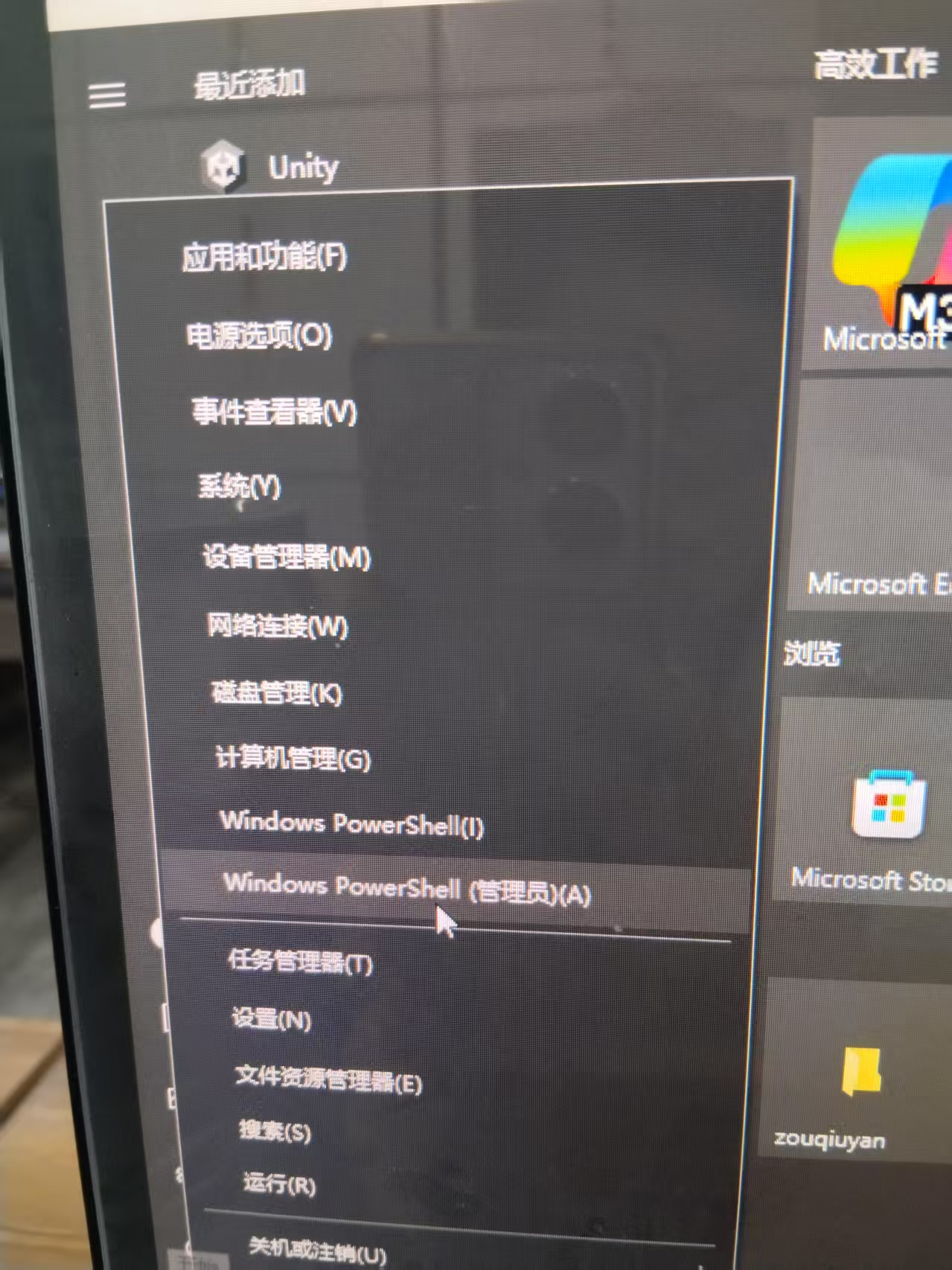
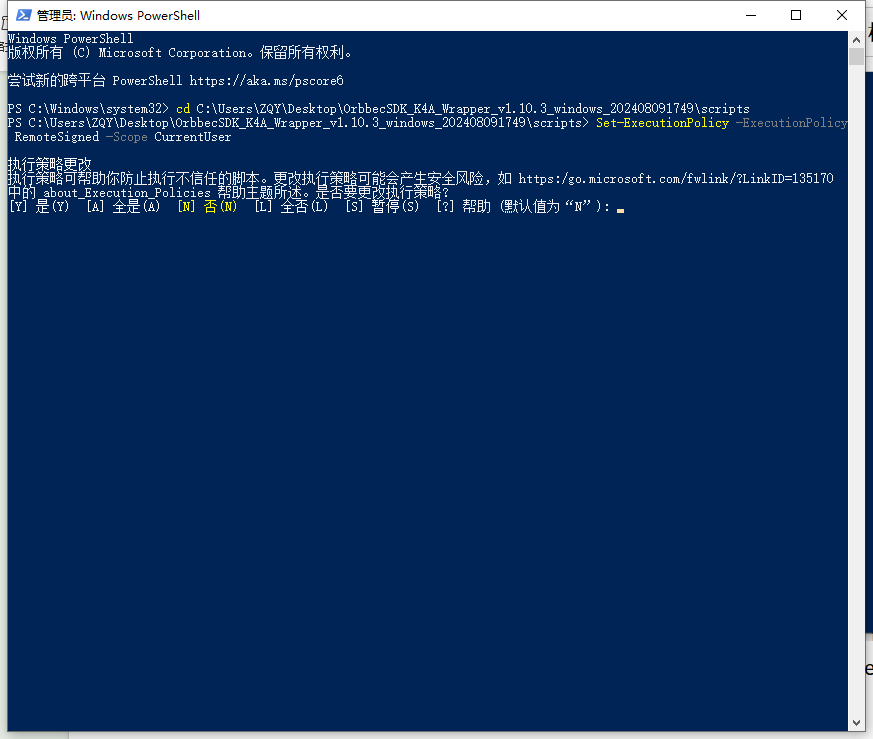
1.以管理員方式運行(開始-右鍵-以管理員身份運行)
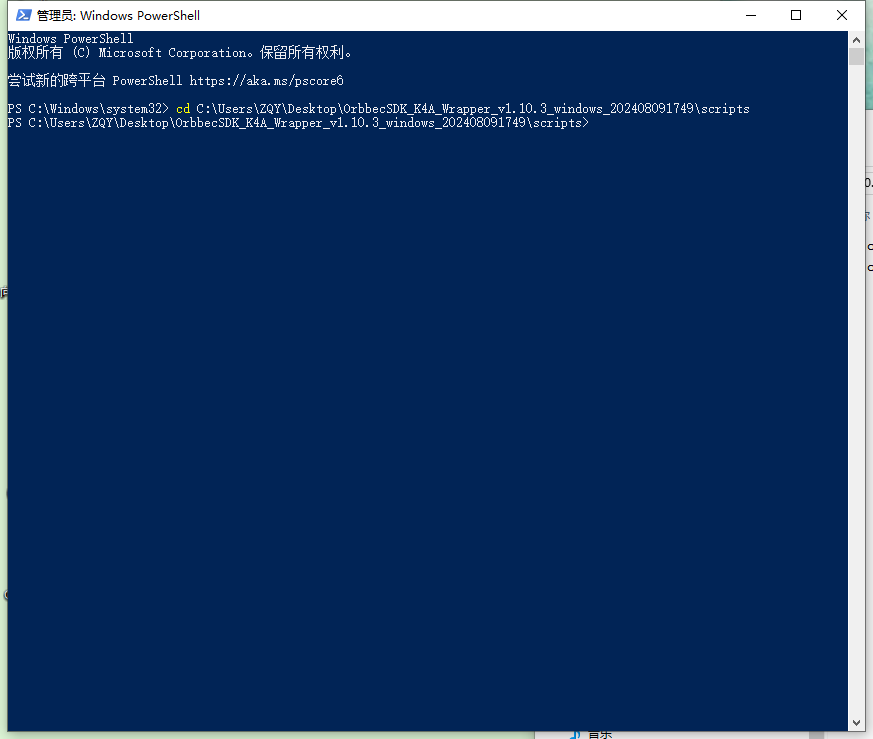
2.輸入 cd 空格 加上上面文件夾的打開的位置(E:\OrbbecSDK_K4A_Wrapper_v1.10.3_windows_202408091749\scripts),注意不要有中文

4.輸入Set-ExecutionPolicy -ExecutionPolicy RemoteSigned -Scope CurrentUser
5.輸入 y?
6.輸入 .\obsensor_metadata_win10.ps1 -op install_all
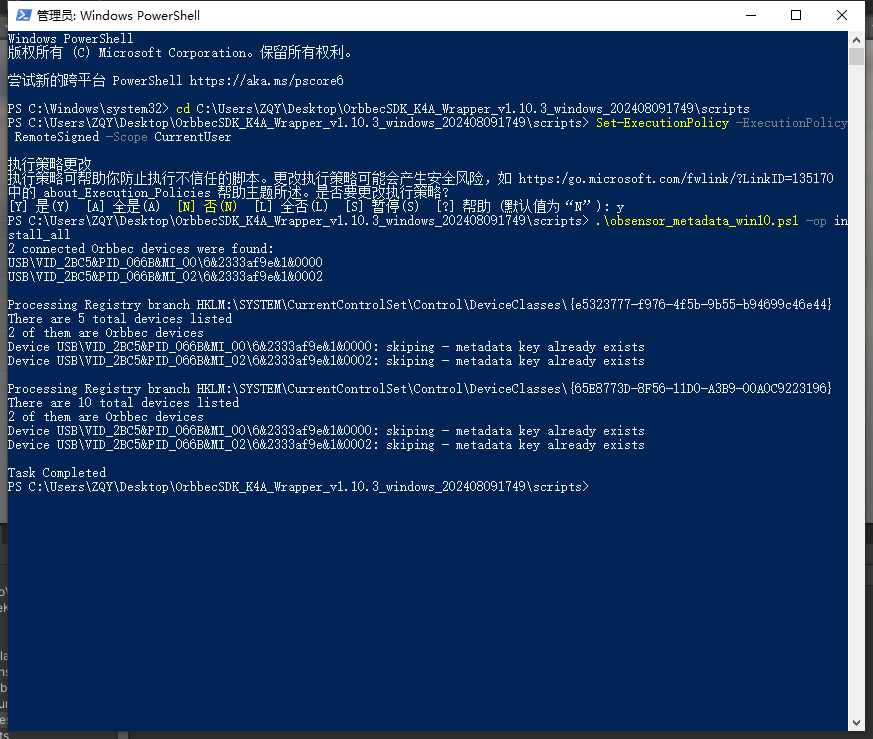
注意:如果出現錯誤,就輸入 powershell -ExecutionPolicy Bypass -File .\obsensor_metadata_win10.ps1 -op install_all
注意踩坑:每一個新的設備,都要有重新配置一下環境。






)








的內容模型)
![52.[前端開發-JS實戰框架應用]Day03-AJAX-插件開發-備課項目實戰-Lodash](http://pic.xiahunao.cn/52.[前端開發-JS實戰框架應用]Day03-AJAX-插件開發-備課項目實戰-Lodash)


