點云組幀
感知算法人員在完成點云的運動畸變補償后,會發現一個問題:激光雷達發送的點云數據包中的點云數量其實非常少,完全無法用來進行后續感知和定位層面的處理工作。
此時,感知算法人員就需要對這些數據包進行點云組幀的處理。
1. 為什么需要點云組幀?
-
激光雷達是逐點輸出數據的,不同于相機一次性獲取完整圖像,LiDAR 通過旋轉掃描環境,因此點云需要累積和組織。
-
數據包需要時間同步,不同 LiDAR 可能有不同的掃描模式(逐線掃描、逐點掃描),如果不進行同步,可能會出現錯幀或數據丟失。
-
運動補償(去畸變),當 LiDAR 安裝在運動平臺(如無人車、機器人)上,點云數據會因為運動而產生畸變,需配合 IMU 進行修正。
-
多雷達數據融合,在多傳感器 SLAM(Simultaneous Localization and Mapping)系統中,可能需要將多個雷達的點云數據合并。
2. 組幀的方法
(1) 按時間窗口組幀
適用于:機械式 LiDAR(如 Velodyne 系列)
-
以 某個時間間隔(如 100ms) 或 一圈完整掃描(360°) 作為一幀。
-
需要結合 LiDAR 旋轉角度計算幀的起止點。
示例:
-
Velodyne-16 激光雷達,每秒 10 圈,每圈 100ms,數據包時間同步后按 100ms 組幀。
-
Livox LiDAR(非旋轉式)可以設置時間窗口 50ms 組幀。
(2) 按角度范圍組幀
適用于:旋轉式 LiDAR
-
根據激光雷達的 方位角(Azimuth) 進行分割,例如每轉 360° 形成一幀。
-
以 0° ~ 360° 為完整一幀,當掃描角度回到 0° 附近,則開始新一幀。
?外參變化
1. 為什么需要外參變換?
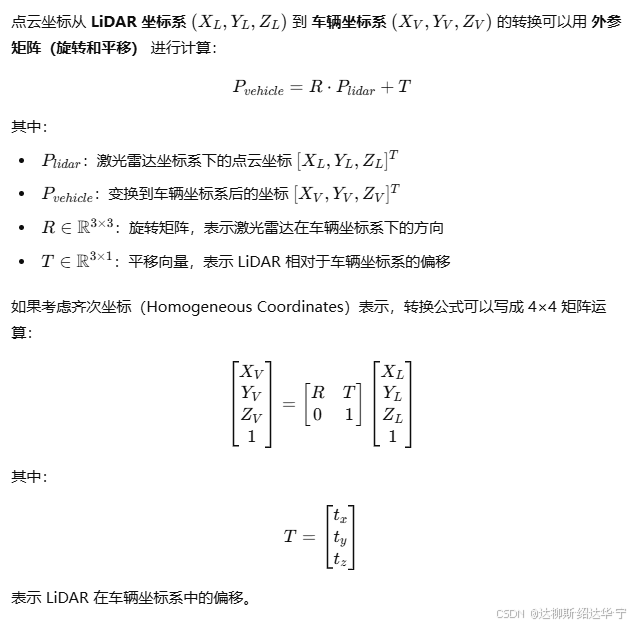
在自動駕駛系統中,激光雷達坐標系 僅適用于 LiDAR 自身的數據,而車輛坐標系 是整個車輛感知、決策、控制的基準。因此,所有傳感器(LiDAR、攝像頭、毫米波雷達)都需要 轉換到車輛坐標系,以實現數據融合。
示例:
-
LiDAR 采集的點云 在其本地坐標系中表示(單位:米)。
-
車輛坐標系 是以車輛的質心(通常是后軸中心)為原點。
-
攝像頭坐標系 也需要與車輛坐標系對齊,以進行多傳感器融合。
2. 變換模型
?濾波處理
?點云濾波是自動駕駛和 3D 視覺任務中的關鍵步驟,它用于去除噪聲、降低數據量、增強點云質量,以提高后續感知算法的準確性和計算效率。常見的點云濾波方法包括 體素濾波(Voxel Grid Filter)、統計濾波(Statistical Outlier Removal, SOR)、半徑濾波(Radius Outlier Removal, ROR)、均值/中值濾波 等。







)





是藍牙低功耗(Bluetooth Low Energy,簡稱BLE)協議棧中的一個核心協議)
![[ deepseek 指令篇章 ]300個領域和賽道喂飯級deepseek指令](http://pic.xiahunao.cn/[ deepseek 指令篇章 ]300個領域和賽道喂飯級deepseek指令)



)
或應用程序(EXE)”進行混淆)