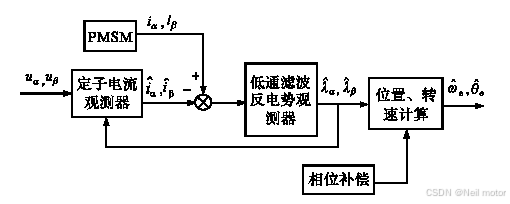
一、原理介紹
在眾多無位置傳感器控制方法中,低通濾波反電勢觀測器結構簡單,參數整定容易,易于編程實現。但是該方法估計出的反電勢會產生相位滯后,需要在估計永磁同步電機轉子位置時進行了相位補償。
二、仿真模型
在MATLAB/simulink里面驗證所提算法,搭建采用PLL的傳統SMO仿真。采用和實驗中一致的控制周期1e-4,電機部分計算周期為1e-6。仿真模型如下所示:
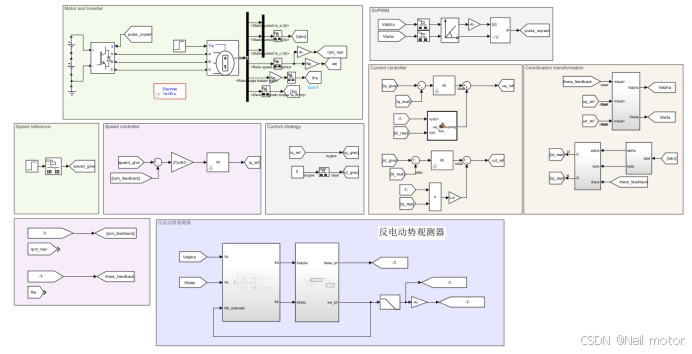
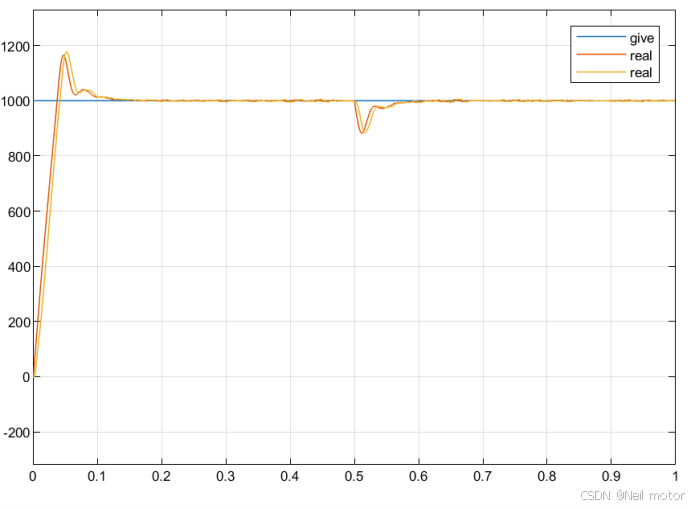
仿真工況:電機空載零速啟動,0s階躍給定轉速1000rpm,0.5s施加額定負載
2.1給定轉速、實際轉速和估計轉速
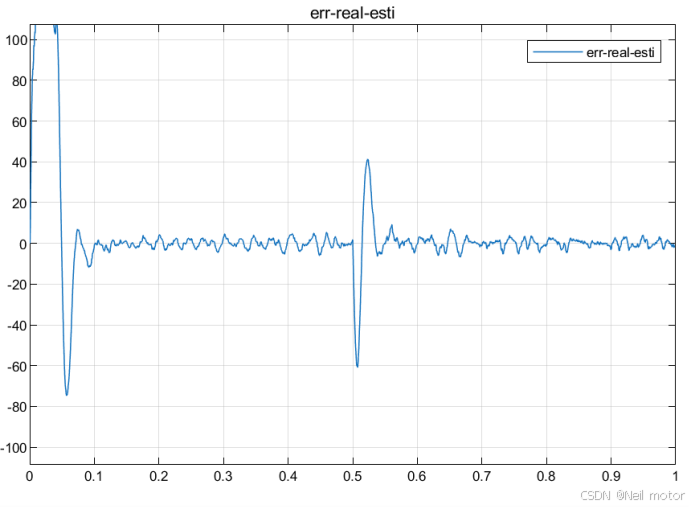
 2.2估計轉速與實際轉速誤差
2.2估計轉速與實際轉速誤差
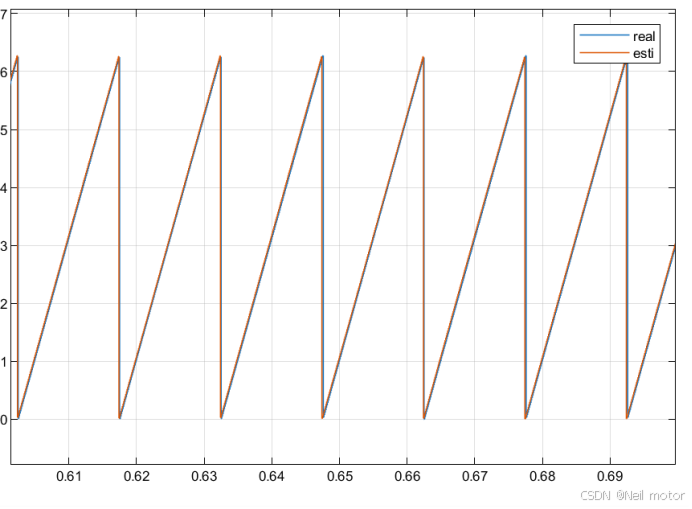
2.3估計轉角與實際轉角?
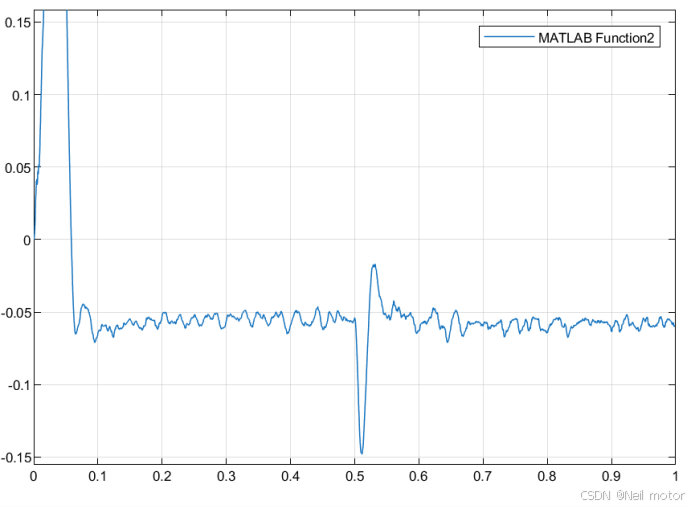
2.4估計轉角與實際轉角誤差
2.5不加相位補償的估計轉角與實際轉角?

低通濾波反電勢觀測器結構簡單、調參容易,其中只有一個參數Ka需要調節,Ka為低通濾波器的帶寬。但是其表達式中含有積分環節, 當采樣電流存在采樣誤差和直流偏置時,積分環節的存在也會產生誤差積累。此外低通濾波特性會導致相位滯后,因此需要對由反電勢計算出的轉子位置進行實時相位補償。但是為了補償相位滯后需要利用實時的角速度信息,而角速度的估計值會影響到補償效果。?










![[Web 安全] PHP 反序列化漏洞 —— PHP 魔術方法](http://pic.xiahunao.cn/[Web 安全] PHP 反序列化漏洞 —— PHP 魔術方法)

)



![[LeetCode]day33 150.逆波蘭式求表達值 + 239.滑動窗口最大值](http://pic.xiahunao.cn/[LeetCode]day33 150.逆波蘭式求表達值 + 239.滑動窗口最大值)


